|
République Algérienne Démocratique et
Populaire
Ministère de l'enseignement Supérieur et de la
Recherche Scientifique
UniversitéMentouri de
Constantine
Facultédes Sciences de
l'ingénieur
Département d'informatique
Mémoire
Pour l'obtention du diplôme de Master Professionel en
informatique
Option : Sciences et Technologies de l'Information et de la
Communication
Recalage d'images médicales multimodales
par
évolution différentielle
adaptative
Réalisépar :
Aya Belattar
et
Abla Elaggoune
Encadrépar :
Dr. Amer Draa
Année universitaire
2011-2012
i
Remerciements
Nous tenons, avant tout, à remercier en premier lieu
`Allah' le tout puissant qui nous a donné le courage et la patience pour
achever ce travaille.
Nous tenons, aussi, à remercier notre encadreur
Dr. Amer Draa pour ses conseils, ses orientations, son soutien
moral et ses qualités humaines.
Nous remercions, également, tous les membres du jury qui
ont accepté d'évaluer ce travail.
Finalement, nous remercions toutes les personnes qui, directement
ou indirectement, ont contribué à la réalisation de ce
mémoire.
.a)eafeace
Ce mémoire est particulièrement
dédié :
A mes chers parents
A mes frères « Aymen et Adam »
A mes amis
Et enfin, a tous ceux qui de près ou de loin
ont
contribué à ce travail.
ii
Aya
iii
.a)eafeace
A la mémoire de mon père
A ma mère
A toute ma famille en particulier Ghassab Adel,
Ghassab Manar et Chendri Allèl
A mes enseignants, mes collègues, mes amis et
en
particulier à mon ami Hamid.
Abla
iv
Rééssuméé
Dans ce travail, une approche à évolution
différentielle adaptative pour le recalage d'images médicales
multimodales basée sur la maximisation de l'information mutuelle est
proposée. Le processus de traitement vise à maximiser
l'information mutuelle afin de trouver les paramètres de la meilleure
transformation qui permettent la mise en correspondance de deux images.
Nous avons proposé deux nouveaux algorithmes à
évolution différentielle pour cette tache de recalage: un
algorithme différentiel linéairement adaptatif et un algorithme
différentiel périodiquement adaptatif, afin de réaliser un
bon compromis entre l'exploration et l'exploitation dans le processus de
recherche.
Les résultats obtenu ont prouvé que l'adaptation
des paramètres d'ans l'algorithme différentiel le rend meilleur.
De plus, à travers l'utilisation d'une formule sinusoïdale pour
l'adaptation du facteur d'amplification dans l'opération de mutation, on
a pu réduire la complexité algorithmique de l'évolution
différentielle de base.
Mottss ccllééss:: Evolution
différentielle, Recalage d'images, Information mutuelle, Adaptation de
paramètres, Exploration, Exploitation.
Table des matières
v
Remerciement i
Résumé iv
Table des matières v
Liste des figures ix
Liste d'algorithmes xi
Liste d'équations xii
Liste des Tableaux xiii
Introduction générale 1
Chapitre 1 : Recalage d'images médicales
1. Introduction 3
2. Imagerie médicale 3
2.1. Quelque types de modalité 4
2.2. Fusion et recalage 5
3. Recalage d'image 6
3.1. définitions 6
3.2. Types de recalage 7
a) Recalage multi-Modalité 7
b) Recalage de gabarit 7
c) Recalage d'image prises de différents points de vue
7
d) Recalage temporel 7
3.3. Classification des transformations géometriques 8
3.3.1. Transformations linéaire 8
a) Transformations rigides 8
b) Similitudes 8
c) Transformations affines 9
d) Transformations projectives 9
3.3.2 Transformation non linéaire (non rigides) 9
a) Transformations locales non paramétriques 10
b) Transformations locales parametriques 10
vi
3.4. Méthodes de recalage 10
3.4.1. Méthodes géometriques 10
3.4.2. Méthodes iconiques(denses) 12
3.4.3.Méthodes hybride 16
3.5. Information mutuelle et recalage d'image 18
3.5.1. Entropie 18
3.5.2. Entropie conjointe 18
3.5.3. Information mutuelle 19
3.5.4. Avantages et limites de l'utilisation de l'IM 20
4. Recalage et l'imagerie medicale 21
5. Conclusion 23
Chapitre 2 : Métaheuristique d'optimisation
1. Introduction 24
2. Définition 24
2.1. Problémes d'optimisation 24
2.2. Optimum local 24
2.3. Optimum global 25
3. Métaheuristiques 25
4. Classification des metaheuristiques 26
4.1 Métaheuristique a base de population 26
4.1.1. Algorithmes evolutionnaires 27
4.1.2. Optimisation par essaim de particules 31
4.1.3. Optimisation par les colonies de fourmis 32
4.2. Métaheuristique a base de voisinage 34
4.2.1. Recuit simulé 34
4.2.2. Recherche Tabou 35
4.2.3. Méthode de la Descente (Hill-Climbing) 36
4.3. Méthodes hybrides 37
5. Conclusion 37
Chapitre 3 : Évolution différentielle
1. Introduction 38
2. Principe de l'évolution différantielle 38
vii
2.1 Mutation différantielle 38
2.2 Croisement différentiel 39
2.3 Sélection 40
2.4 Critère d'arrêt 40
3.Variantes pour l'évolution differentielle 41
4. Avantages et limites de l'évolution differentielle
42
4.1. Avantages de l'évolution differentielle 42
4.2. Limites de l'évolution differentielle 42
5. Conclusion 43
Chapitre 4 : AED pour le recalage d'image
1. Introduction 44
2. Formulation de problème 44
2.1. Représentation des individus 44
2.2. L'espace de recherche 45
2.2.1 Transformation rigide 45
2.2.2 Transformation rigide avec zoom(similitude) 45
2.2.3 Transformation affine 45
2.3. Fonction objectif 46
2.4. Stratégie de recherche 46
3. Contribution 46
3.1. Algorithme differentiel linéairement adaptatif 48
3.2. Algorithme différentiel périodiquement
adaptatif 48
3.3. Résultats expérimentaux 49
3.3.1. Résultat numérique. 49
3.3.2 Analuse qualitative des Résultats. 50
a) Recalage rigide 50
b) Recalage rigide avec zoom 53
4. Interface Graphique. 54
5.Conclusion. 56
Conclusion générale 57
Bibliographie 58
viii
Liste des figures
Figure 1.1 : Évolution de la pratique
chirurgicale : de la trépanation à la chirurgie
microscopique 4
Figure 1.2 : Multi modalité
fonctionnelle et structurelle pour la compréhension Du
cerveau humain 5
Figure 1.3 : recalage d'image. 7
Figure 1.4 : Transformation rigide 8
Figure 1.5 : Transformation de similitude .
9
Figure 1.6 : Transformation affine. 9
Figure 1.7 : Transformation projective 9
Figure 1.8 : Transformation local. 10
Figure 1.9 : Transformation
géométrique : A gauche les primitives sont des points. A
droite la primitive est une surface. 11
Figure 1.10 : Une image et son histogramme .
13
Figure 1.11 : Représentation graphique
d'histogramme conjoint 13
Figure 1.12 : Exemple d'histogrammes
conjoints obtenus pour (a) des images non
recalées et (b) des images recalées.. 14
Figure 1.13 : Histogramme conjoint de deux
IRM cérébrales (coupes coronales
représentés) calculé pour deux
transformations différentes 14
Figure 1.14 : Histogramme conjoint d'un
couple IRM/scanner (coupes axiales
représentés) calcule pour deux transformations
différentes 15
Figure 1.15 : L'entropie, l'entropie
conjointe et l'information mutuelle pour deux images
A et B 20
Figure 1.16 : Recalage Multimodal Structurel
: alignement d'une image TDM sur une
image IRM 22
Figure 1.17 : Recalage Multimodal
Structurel-Fonctionnel : alignement d'une image TEP
(fonctionnelle) sur une image IRM-T2 (structurelle). 22
ix
Figure 1.18 : Recalage multimodal
données/atlas : alignement d'un volume TDM sur
l'atlas anatomique de Talairach-Tournoux. 23
Figure 2.1 : Optima locaux et optima globaux
d'une fonction a une variable. 25
Figure 2.2 : Classification des
métaheuristiques 26
Figure 2.3 : Codage binaire d'un chromosome
28
Figure 2.4 : Codage réel d'un chromosome
29
Figure 2.5 : Détermination du plus court
chemin par une colonie de fourmis. (a) Situation initiale, (b) Introduction
d'un obstacle, (c) Recherche du chemin optimal,
(d)Prédominance du chemin optimal. 33
Figure 3.1 : Mutation différentielle
39
Figure 3.2 : croisement différentiel : a)
croisement binomial, b) croisement exponentiel 40
Figure 4.1 : Un individu pour une Transformation
Similitude 44
Figure 4.2 : Recalage rigide multimodale 47
Figure 4.3 : Le meilleur global, le moyen et le
minima locaux aux cours du recalage
rigide des images de la figure 4.2. 47
Figure 4.4 : Équation sinusoïdale du
facteur Fd. 48
Figure 4.5 : Paire d'image : IRM-Tomographie
calculée à rayon X(CTI). 51
Figure 4.6 : Recalage rigide des images de la
figure 4.5 par ADE (à gauche), (au milieu) EDLA
et EDPA (à droite) 51
Figure 4.7 : Les graphes d'IM correspondant aux
images de la figure 4.5 : : EDA (à gauche
au-dessus), EDLA (à droite au-dessus) et EDPL (milieu
au-dessous),. 52
Figure 4.8 : Paire d'image à recaler :
à gauche IRM coloré et à droite Scanner 53
Figure 4.9 : Interface de transformation des
images de la figure 4.7 53
Figure 4.10 : les graphes d'IM correspondant aux
images de la figure 4.7: EDB (à gauche
au-. dessus), EDLA (à droite au-dessus) et EDPL (milieu
au-dessous). 54
Figure 4.11 : Interface de transformation
similitude avant l'execution. 55
Figure 4.12 : Interface de transformation
similitude apres l'execution. 54
x
Liste d'algorithmes
Algorithme 2.1 : Algorithme
évolutionnaire génétique 28
Algorithme 2.2 : Optimisation par colonies de
fourmis 34
Algorithme 2.3 : Optimisation par le recuit
simulé 35
Algorithme 2.4 : Optimisation par la
recherche tabou 36
Algorithme 2.5 : Optimisation par la
méthode de descente 36
Algorithme 3.1 : Évolution
différentielle 41
xi
Liste d'équations
Equation 1.1 : Recalage d'image 6
Equation 1.2 : Transformations rigides 8
Equation 1.3 : Transformation similitude 8
Equation 1.4 : Transformation affine 9
Equation 1.5 : Entropie 18
Equation 1.6 : Entropie conjointe 18
Equation 1.7 : Information mutuelle :
Définition 1 19
Equation 1.8 : Information mutuelle :
Définition 2 19
Equation 1.9 : Information mutuelle :
Définition 3 19
Equation 1.10 : Information mutuelle
normalisée 20
Equation 2.1 : Vitesse d'une particule 32
Equation 2.2 : Position d'une particule 32
Equation 3.1 : Mutation différentielle
38
Equation 3.2 : Croisement
différentielle 39
Equation 3.3 : Sélection 40
Equation 3.4 : Variantes d'évolution
différentielle 41
Equation 4.1 : Transformation rigide 45
Equation 4.2 : Transformation rigide avec
zoom 45
Equation 4. 3 : Transformation affine 45
Equation 4.4 : Évolution
différentielle linéairement adaptatif (EDLA) 47
Equation 4.5 : Évolution
différentielle périodiquement adaptatif (EDPA) 48
xii
Liste des tables
Table 1.1 : Quelques mesures de
similarité utiles. 17
Table 4.1 : Résultat numériques
des transformations : rigide, rigide avec zoom et affine 50
1
Introduction générale
Le traitement d'images et la vision par ordinateur sont deux
disciplines relativement jeunes, mais elles évoluent rapidement. Ces
deux domaines de traitement de l'information jouent un rôle très
important dans plusieurs contextes : académiques, technologiques et
industriels.
Le recalage d'image est un problème classique en vision
par ordinateur et un processus fondamental en traitement d'images. Il vise
à déterminer la meilleure transformation
géométrique qui permet de superposer la plus grande partie
commune possible de deux ou plusieurs images prises à différents
moments, depuis différents capteurs (recalage multimodale) ou à
partir de différents point de vue (recalage monomodale). Le recalage
joue un rôle important dans plusieurs applications comme la surveillance
de terre agricole à partir d'images satellitaires, la correspondance
d'images stéréoscopiques et l'alignement d'images
médicales pour le diagnostique.
Pour résoudre le problème de recalage il existe
plusieurs techniques. On peut les classer en deux grandes classes : les
approches géométriques basées primitives, elles s'appuient
sur l'utilisation de primitives géométriques (points, segments,
contours, etc.) ; et les approches basées intensité, dites
également approches iconiques. Ce deuxième type, approches
iconiques, est mieux adapté au recalage d'images multimodales.
Le problème de recalage est connu comme un
problème d'optimisation. Pour sa résolution, plusieurs
méthodes approchées ont été proposées. Parmi
ces méthodes on trouve: le recuit simulé, la recherche taboue,
les algorithmes génétiques, les colonies de fourmis et les
systèmes immunitaires artificiels.
Dans ce travail, nous proposons un algorithme à
évolution différentielle adaptative pour le recalage d'images
médicales multimodales en utilisant l'information mutuelle comme mesure
de similarité. Deux variantes ont été définies.
Dans la première, une adaptation linéaire du facteur
d'amplification de l'opération de mutation est utilisée. Dans la
deuxième, cette adaptation linéaire est remplacée par une
formule sinusoïdale permettant à l'operateur de mutation de changer
son rôle périodiquement de l'exploration à l'exploitation
et vice versa.
2
Les résultats expérimentaux obtenus de
l'application des deux variantes à différentes paires d'images
médicales, IRM et PET, ont été comparés avec ceux
obtenu de l'application de l'évolution différentielle de base sur
les mêmes paires d'images. Cette comparaison a démontré la
supériorité de nos deux variantes par rapport à
l'algorithme de base au moins au niveau de la complexité
algorithmique.
Ce mémoire s'articule donc de la manière suivante
:
- Dans le premier chapitre nous expliquons brièvement le
problème de recalage
d'images, ses principes de base, ses types et ses domaines
d'application.
- Le deuxième chapitre présente le domaine
d'optimisation en se concentrant sur les différentes approches
proposées dans la littérature pour résoudre les
différents problèmes d'optimisation.
- Le troisième chapitre est consacré à la
description de l'algorithme de base de l'évolution
différentielle, ses variantes, ses limites, et ses avantages.
- Le quatrième chapitre détaille nos
contributions pour le recalage d'images médicales, à savoir :
l'adaptation linéaire et l'adaptation périodique des
paramètres. Dans sa deuxième partie les résultats
expérimentaux sont introduits et discutés.
Chapitre 1 :

« Si l'esprit d'un homme s'égare, faites-lui
étudier les mathématiques car dans les démonstrations,
pour peu qu'il s'écarte, il sera obligé de recommencer
»
Francis Bacon.
1. Chapitre 1 Recalage d'images médicales
3
Introduction
A l'évolution des nouvelles techniques occupées
à l'interprétation des images par ordinateur, le traitement
d'image joue un rôle très important dans plusieurs domaines tels
que l'imagerie satellitaire, médicale, industrielle, etc. L'imagerie
médicale a connu des techniques efficaces qui permettent
d'acquérir et de traiter des images internes du corps humain et
d'établir un diagnostic ou même la mise en oeuvre d'une
thérapeutique en temps réel comme échographie, IRM, TEP et
scanner [Larousse médicale, 2006]. Selon la technique utilisée,
on peut distinguer deux types d'images médicales. Les images anatomiques
médicales permettant d'obtenir des informations
géométriques sur la structure des organes (taille, volume,
localisation, etc.). Et les images fonctionnelles permettant d'obtenir une
vision sur la fonctionnalité des organes, par exemple le TEP.
Malgré l'efficacité de la vision par ordinateur
dans plusieurs domaines, elle reste incapable de visualiser certains objets
correctement. Parmi les vieilles problématiques de la vision par
ordinateur, on trouve le recalage. Le recalage d'images est un processus qui
permet de faire une transformation spatial entre deux ou plusieurs images.
Dans ce chapitre, nous présentons le problème
de recalage en imagerie médicale. Nous commençons par une
introduction sur l'imagerie médicale. Puis, nous présentons les
fondamentaux théoriques du recalage des images : définitions,
types, méthodes de recalage les plus pertinentes, mesure de
similarités entre images (en se concentrant sur l'information mutuelle).
En fin, nous pressentons les différentes applications de recalage en
imagerie médicale.
2. Imagerie médicale
De la trépanation à la robotique chirurgicale,
la pratique médicale a connu une véritable révolution
(Figure 1.1). De nos jours, grâce aux nouvelles techniques d'imagerie,
les procédés de traitement se sont modernisés, le
diagnostic est devenu plus précis et la qualité des soins est
désormais meilleure. Loin des pratiques traditionnelles, où
«voir» passait par «ouvrir», aujourd'hui, les radiologues,
à l'aide des techniques tomographiques, peuvent diagnostiquer et traiter
de façon quasiment non-invasive. Le recours à la chirurgie
invasive est devenu la solution de dernier recours [Atif, 2004].
Chapitre 1 Recalage d'images médicales
4
Une trépanation exercée XVIième
siècle Un chirurgien opérant à l'aide d'un
microscope
Figure 1.1 Évolution de la pratique
chirurgicale : de la trépanation à la chirurgie microscopique.
Parmi les modalités d'acquisition, on distingue celles
qui fournissent des propriétés structurelles (morphologiques) de
la zone étudiée (IRM, TDM, X-Ray, etc.), de celles qui restituent
des aspects fonctionnels (TEP, TEMP, IRMf, MEG, etc.) [Atif, 2004] (Figure
1.2). Donc, selon la technique utilisée on peut distinguer deux types
d'images médicales. Les images anatomiques permettant d'obtenir des
informations géométriques sur la structure des organes (taille,
volume, localisation, etc.), et les images fonctionnelles permettant d'obtenir
une vision sur la fonctionnalité des organes.
2.1. Quelques types de modalité
? L'imagerie par résonance magnétique
(IRM) : On distingue deux types d'IRM anatomique et fonctionnelle.
L'IRM anatomique permet de visualiser la structure anatomique de tout volume du
corps. L''IRM fonctionnelle permet de suivre l'activité d'un organe,
à travers l'afflux de sang oxygéné dans certaines de ses
zones [Frija et Mazoyer, 2002].
? la Radiologie : La radiologie repose sur
l'utilisation des rayons X. Elle s'applique au diagnostic et au traitement des
maladies selon différents modalités techniques : La radiographie
(Standard), La radioscopie et La tomodensitométrie (scan RX, TDM)
[Larousse médicale, 2006].
? la tomographie par émission de positions
(TEP) : La TEP renseigne sur la biochimie des organes. Elle fournit
des informations sur le fonctionnement des tissus normaux et pathologiques
[Frija et Mazoyer, 2002].
? Tomographie d'Émission Mono Photonique (TEMP)
: Le principe de la TEMP est de suivre l'évolution dans le
corps humain d'un radioélément, qui est dans ce cas un
Chapitre 1 Recalage d'images médicales
5
émetteur naturel de simples photons ã. La
TEMP constitue ainsi une technique d'exploration de la perfusion
cérébrale [Grova, 2005].
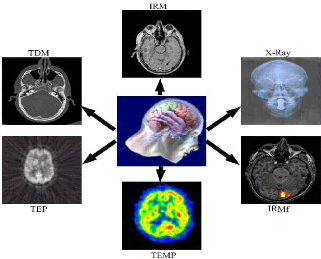
Figure 1.2 Multi modalité fonctionnelle
et structurelle pour la compréhension Du cerveau humain
[Atif, 2004].
2.2. Fusion et Recalage
Plusieurs modalités sont parfois utilisées pour
effectuer un seul diagnostic. Pour certaines anomalies, le radiologue doit
à la fois étudier l'aspect structurel et fonctionnel d'une zone
d'intérêt. Or, ces modalités sont en général
utilisées avec un décalage dans le temps. Les informations
recueillies doivent être alors fusionnées dans un même
repère pour permettre d'effectuer les différentes analyses et
comparaisons, nécessaires à l'établissent d'un diagnostic
précis et efficace [Atif ,2004].
Le développent parallèle des sciences
informatiques a fait naître l'idée que des logiciels pourraient
aider le praticien dans ce travail. Parmi les besoins les plus courants du
praticien se trouvent une variété de tâches de comparaison
: comparer des images d'un même patient acquises à des instants
différents ou selon des modalités différentes comparer des
images de patients différents ou encore comparer une image avec un atlas
anatomique ou fonctionnel.
Chapitre 1 Recalage d'images médicales
6
Ces tâches de comparaison relèvent toutes d'une
même problématique : le recalage [Roche, 2011].
3. Recalage d'image 3.1. Définitions
? Définition 01 : Le recalage (en
Anglais registration) est la tâche qui cherche la meilleure
transformation qui permet de superposer la plus grande partie commune possible
des images à apparier compte tenu des variations de la scène
[Talbi, 2009 ; Brown, 1992].
? Définition 02 : Le recalage d'image
est la tâche qui permet d'aligner deux images.
Si on considère ces deux images comme deux matrices
notées I1 et I2 où I1 (x, y)
et I2 (x, y) sont les intensités des pixels au
point dont les cordonnées sont x et y, Alors, le
recalage est l'opération qui permet d'estimer les fonctions f
et g qui vérifient la relation suivante [Talbi, 2009 ;
Brown, 1992] :
I2(x, y)=g (I2 (f(x, y))) (1.1)
Où : f est une fonction à deux dimensions
représentant la transformation géométrique et g
est une fonction à une dimension représentant la
transformation photométrique.
? Définition 03 : Le recalage est la mise
en correspondance des images ayant la formule générale [Bloch]
:
min f (I1, t(I2)), t C T (1.1)
Où :
I1 et I2 sont les images à recaler
(ou informations extraites de ces images), t : transformation, T
: ensemble des transformations possibles / admissibles, f :
critère de dissimilarité (min) ou de similarité (max).
Chapitre 1 Recalage d'images médicales
7
Figure 1.3 Recalage d'image.
3.2. Types de recalage
On distingue généralement quatre types de recalage
[Mashoul, 2004] :
a) Recalage multi-modalité : Traite
les problèmes où les images de la même scène sont
prises par des capteurs différents.
- Exemple d'application :
Intégration d'information de deux images, l'une prise par un
radar et l'autre par un système optique.
b) Recalage de gabarit : Recherche une forme de
référence dans une image. - Exemple d'application
: Localisation d'une cible par un missile.
c) Recalage d'image prises de différents
points de vue : Ce type de recalage requiert souvent des
transformations locales afin d'éliminer les distorsions perspectives.
- Exemple d'application : Vision
stéréoscopique.
d) Recalage temporel : La mise en
correspondances entre deux images prises à des moments
différents, ce type de recalage doit accepter les divergences entre les
deux images dues aux changements réels dans la scène.
- Exemple d'application : Suivre
l'évolution d'une pathologie.
Chapitre 1 Recalage d'images médicales
3.3. Classification des transformations
géométriques
3.3.1. Transformation linéaire
Transformations linéaires définie par : X -
A?X + b? où n est la dimension,
An est une application linéaire de dimension
nxn, et bn est un vecteur de translation de
dimension nx1. Il existe plusieurs types de transformations
géométriques linéaires.
a) Transformations rigides
La transformation rigide est la composition d'une rotation et
d'une translation. L'hypothèse de rigidité convient au cas
où l'on cherche à compenser la différence de
positionnement d'un objet par rapport aux capteurs sans tenir compte
d'éventuelles déformation des tissus imagés ou de
distorsions géométriques créées par les
procèdes d'imagerie [Roche, 2011].
La formulation de transformations rigides d'une image 2D est la
suivante :
T(x) = Rx + t (1.2)
Où : t est un vecteur 2×1 qui
représente la translation, et R est une matrice orthogonale
directe 2x2.

8
Figure 1.4 Transformation rigide.
b) Similitudes
Consiste en l'estimation d'un facteur d'échelle isotrope
en plus des translations et des rotations. Ce type de recalage conserve les
angles et le rapport entre les distances :
T(x)=sRx+t, s>0 (1.3)
s c'est le facteur d'échelle [Brown, 1992].

Chapitre 1 Recalage d'images médicales
Figure 1.5 Transformation de similitude.
c) Transformations affines
Ces transformations autorisent, en plus des rotations et des
translations, de prendre en compte un facteur d'échelle anisotrope et de
modéliser des cisaillements, elles conservent le parallélisme.
T(x)=A(x)+t (1.4)
Sachant que A est une matrice 2×2 quelconque
[Roche, 2011].

Figure 1.6 Transformation affine.
d) Transformations projectives
Les transformations projectives sont utilisées dans le
cas où des images 3D sont recalées avec des images 2D acquises au
moyen d'une camera, par exemple les images radiologique et les images
vidéo [Talbi, 2009].

9
Figure 1.7 Transformation projective.
3.3.2. Transformations non linéaires (non
rigides)
Contrairement aux transformations linéaires, les
déformations non-rigides sont appliquées localement, c'est
à dire que la transformation appliquée en un point peut
effectivement être
Chapitre 1 Recalage d'images médicales
différente de celle appliquée à ses
voisins. L'amplitude des déformations recherchées est
généralement plus faible et localisée. Un nombre important
de modèles de déformation non-rigide ont été
proposés dans la littérature du recalage. Parmi ceux-ci, on fait
la distinction entre les transformations locales non paramétriques et
les transformations locales paramétriques [Rubeaux, 2011].
a) Transformations locales
non-paramétriques
Dans ce type, la transformation est définie en chaque
pixel de l'image. Ces modèles nécessitent l'utilisation d'un
terme de régularisation pour contraindre la solution, car le
modèle de déformation est totalement libre [Rubeaux, 2011].
b) Transformations locales
paramétriques
Des transformations d'ordre plus général
pourront être obtenues en perturbant localement la composante globale du
mouvement. Les coordonnés de la déformation résiduelle
peuvent être modélisées comme des combinaisons
linéaires de fonctions élémentaires [Roche 2001].

10
Figure 1.8 Transformation local.
3.4. Méthodes de recalage
On peut distinguer deux approches de recalages :
géométrique et iconique. La première est basée sur
l'extraction des primitives, et la deuxième est basée sur la
mesure de similarité.
3.4.1. Méthodes
géométriques
Les méthodes géométriques sont peut
être les plus naturelles car elles procèdent de façon
analogue à l'esprit humain conscient. Elles sont basées sur
l'extraction dans les images de sous-ensembles de points homologues
(primitives) qui peuvent être des points, des lignes, des surfaces, des
volumes, etc., qu'il s'agit ensuite de mettre en correspondance [Roche,
2011].
Le choix des primitives doit être guidé par un
certain nombre de propriétés : détection facile et
précise, répartition sur l'ensemble de l'image, robustesse au
bruit, aux artefacts et aux
Chapitre 1 Recalage d'images médicales
11
différents changements liés à
l'acquisition [Noblet, 2006]. Cependant, la majorité des approches se
basent soit sur une sélection manuelle, soit sur une détection
semi-automatique des amers (ou primitives géométriques) communs
aux deux images, ce qui impose un prétraitement des données pour
extraire ces points, lignes ou surfaces d'intérêt [Rubeaux,
2011].
En effet ces méthodes reposent sur deux étapes
bien distinctes, qui sont d'ailleurs généralement menés de
façons complètement indépendantes : La première
étape, dite de segmentation est souvent la plus problématique
dès lors que l'on souhaite la réaliser automatiquement. Elle
requiert d'extraire des primitives qui soient significatives ce qui peut
s'avérer difficile si les images sont fortement bruitées (par
exemple, des images ultrasonores). Après la segmentation des primitives
la deuxième étape est celle du recalage proprement dit, C'est
à dire le calcul d'une transformation spatiale "optimale". Il convient
de distinguer le cas où les correspondances entre primitives sont
connues à l'avance (primitives labélisées) du cas
contraire (primitives non labélisées), très
fréquent lorsque la segmentation est automatique [Roche, 2011].
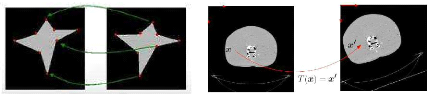
Figure 1.9 Transformation
géométrique : A gauche les primitives sont des points. A droite
la primitive est une surface.
Avantages et Limites des méthodes
géométriques
a) Avantages
On peut résumer les avantages des méthodes
géométriques dans les points suivants :
~? Optimisation de la charge calculatoire par la gestion de
zones d'images plutôt que de détails sur l'image c'est à
dire temps de traitement très réduit, par contre aux
méthodes iconiques où le temps de traitement est très
élevé [Gardeux, 2008].
~? Utilisation de données déjà issues de
l'image et donc plus pertinentes [Gardeux, 2008].
Chapitre 1 Recalage d'images médicales
12
~? Pallier aux problèmes d'artefacts dans les images
initiales et des Différences d'intensité entre les 2 images
à recaler [Gardeux, 2008].
~? Primitives très informatives [Rubeaux, 2011].
b) Limites
On peut résumer les limites des méthodes
géométriques dans les points suivants :
~? Sélection manuelle ou semi-annuelle des primitives,
même si plusieurs équipes travaillent sur la conception de
méthodes d'identification automatiques [Rubeaux, 2011 ; Noblet,
2006].
~? Le choix des primitives est très arbitraire. Il est
difficile de trouver les primitives optimales [Gardeux, 2008].
~? Généralement réservé au recalage
monomodal [Rubeaux, 2011].
~? Prétraitement (segmentation) nécessaire
[Rubeaux, 2011].
3.4.2. Méthodes iconiques (denses)
Les méthodes iconiques sont des approches bas-niveau.
Contrairement aux premières, celles-ci ne nécessitent pas la
segmentation préalable des images. Elles consistent essentiellement
à optimiser une mesure de similarité fondée uniquement sur
des comparaisons locales d'une intensité. Dans ce cas, les primitives
guidant le recalage sont des vecteurs 3D contenant la position et
l'intensité des pixels (voxels).
On reconnait une méthode iconique à deux
propriétés essentielles : D'une part le choix des primitives est
complètement arbitraire : tous les voxels sont a priori des candidats
valables. D'autre part, les primitives ne sont pas des entités
géométriques, elles appartiennent à un espace figuratif
différent du monde réel. Ainsi, le critère utilisé
pour comparer ces primitives est une mesure de similarité
reflétant indirectement une distance géométrique [Talbi,
2009 ; Roche, 2011].
3.4.2.1 Mesure de similarité
Il existe plusieurs mesures de similarité dans la
littérature du recalage d'images. La plupart des mesures existantes
peuvent être définies à partir d'un histogramme conjoint.
D'autres peuvent être appréhendées indépendamment de
la notion d'histogramme conjoint [Roche, 2011].
Chapitre 1 Recalage d'images médicales
13
a) Concept d'histogramme conjoint ?
Histogramme
La première question posée avant d'expliquer
brièvement le concept d'histogramme conjoint : c'est quoi un histogramme
d'une image ? L'histogramme des niveaux de gris ou des couleurs d'une image est
une fonction qui donne la fréquence d'apparition de chaque niveau de
gris (couleur) dans l'image. Il permet de donner une bonne quantité
d'information sur la distribution des niveaux de gris (couleur).

Figure 1.10 Une image et son histogramme.
? Histogramme conjoint
Maintenant, nous allons expliquer la notion d'histogramme
conjoint : L'histogramme conjoint de deux images I et J est
calculé à partir du calcul des fréquences d'apparitions de
l'intensité de chaque couple de pixels de même rang de deux
matrices de pixels. La figure 1.11 démontre ce processus [Bendaib,
2003].
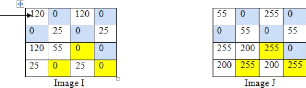
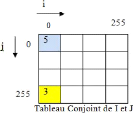
Figure 1.11 Représentation graphique
d'histogramme conjoint.
Chapitre 1 Recalage d'images médicales
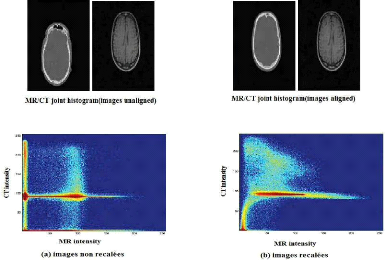
Figure 1.12 Exemple d'histogrammes conjoints
obtenus pour (a) des images non recalées et(b) des
images recalées.
b) Classification des mesures de
similarité
Une mesure de similarité est une fonction à
valeurs réelles dont l'argument est l'histogramme conjoint,
lui-même fonction de la transformation spatiale. Le fondement commun aux
nombreuses mesures proposées dans la littérature est
l'idée que les intensités de deux images manifestent une
cohérence d'autant plus forte que les images sont bien alignées.
Le rôle de la mesure de similarité est précisément
de donner une signification quantitative à cette notion de
cohérence (figures 1.13 et 1.14) [Roche, 2011].
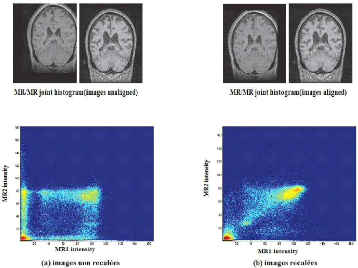
14
Figure 1.13 Histogramme conjoint de deux IRM
cérébrales (coupes coronales représentés)
calculé
pour deux transformations différentes [Roche,
2011].
Chapitre 1 Recalage d'images médicales
Dans la première situation (a) les couples
d'intensité sont répartis dans le plan de façon
relativement désordonné. La cohérence est manifestement
plus forte dans la deuxième situation (b) où on a la très
nette impression que les intensités sont regroupées le long d'une
droite.
15
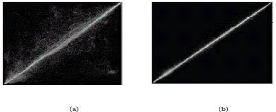
Figure 1.14 Histogramme conjoint d'un couple
IRM/scanner (coupes axiales représentés) calcule
pour deux
transformations différentes.
La situation de recalage (b) donne l'impression visuelle d'un
gain de cohérence. Mais la relation entre les intensités n'est
clairement plus de type affine lorsque les images sont recalées. La
majorité des couples d'intensités est regroupé autour
d'une courbe d'allure parabolique. On observe un amas secondaire nettement plus
dispersé autour de l'intensité 50 dans l'IRM et 150c dans le
scanner. Il n'est pas évident de caractériser une telle
relation.
Les mesures de similarités font une hypothèse
sur la relation liant les niveaux de gris des deux images à recaler. En
général, la nature de cette relation permet de faire une
classification des différentes mesures de similarité. Le tableau
1.1 résume les principales mesures de similarité.
Chapitre 1 Recalage d'images médicales
16
3.4.2.2. Avantages et Inconvénients de la
méthode iconique
a) Avantages
On peut résumer les avantages des méthodes
géométriques dans les points suivants [Gardeux, 2008] :
· On travaille avec toutes les informations portée
par l'image. Celle-ci ne subit pas de prétraitement.
· Adapté au recalage multimodal [Rubeaux, 2011].
· Méthode totalement automatique.
c) limites
On peut résumer les limites des méthodes
géométriques dans les points suivants :
· Difficulté de lier deux images ayant des niveaux
d'intensité différents.
· le problème d'optimisation est bien plus
difficile à résoudre que dans le cas des méthodes
géométriques à cause de la présence de nombreux
minima locaux d'énergie [Noblet, 2006].
· Très grand coût calculatoire de par la
nécessité de calculer l'intensité de tous les voxels de
l'image [Gardeux, 2008], c'est à dire cette méthode
nécessite un temps de traitement important. Pour diminuer le temps de
calcule il existe des approches hiérarchiques par construction de
pyramides d'images [Noblet, 2006].
· Primitives peu informatives (de bas niveau) [Rubeaux,
2011].
3.4.3. Méthodes hybride
Les méthodes hybrides combinent plusieurs types de
caractéristiques extraites des images à Recaler. Le but est
d'améliorer la robustesse du recalage en combinant les avantages
liés aux caractéristiques utilisées. Trois cas sont
envisagés [Rubeaux, 2011] :
a) La combinaison de primitives géométriques de
nature différente comme la combinaison de points et de courbe ou la
combinaison de courbes et de surfaces.
b) La combinaison de différentes informations issues
des niveaux de gris : c'est le cas où le gradient de l'image et
l'information des niveaux de gris sont utilisés conjointement.
c) La combinaison des approches géométriques et
iconiques.
Chapitre 1 Recalage d'images médicales
17
|
Nature de la dépendance
|
Mesure
|
|
Formule
|
|
Conservation de l'intensité
|
SDC*
|
|
? ??,? (? - ?)2 ?,?
|
|
SDA*
|
|
???,? ~? - ?~ ?,?
|
|
Linéaire
|
|
Inter-corrélation normalisé
|
|
??
|
|
???,?
????
?,?
|
|
Critère d'Albert*
|
|
J
? ??,? (?? ? - ?)2
?,?
|
|
Affine
|
|
Coefficient de corrélation
|
|
?? - ???(? - ??)
?
|
|
??,? ????
?,?
|
|
Fonctionnelle
|
|
Critère de Woods*
|
|
??
? ?? ???
|
|
Rapport de corrélation*
|
|
?
?
?
|
|
?? ??2
- ??2
?
|
|
Statistique
|
|
Entropie conjointe *
|
|
-? ??,? ??? ??,??,?
|
|
Information mutuelle
|
|
??,?
?
|
|
???
??,?
????
?,?
|
|
Notations
|
?? = ? ??,?
?
?? = ???,? ? = ?,?
?? = ???,? ?
?,?
?? = ? ????
?
|
??,?
?
|
?=
|
? ?? ?? = ??
??? = ??? - ???
??? = ??? - ???
|
|
?? = ??,? ???? =
? ??
?
? ?? ? ??? = ? ??,? ?
? ?,?
?
= ??? ? ??? = ? ??,? ?
? ?,?
? ??? = ? ???? ? 2 - ??2
?
|
Tableau 1.1 Quelques mesures de
similarité utiles. Les mesures marqués d'un astérisque *
sont à
minimiser. Tandis que les autres sont à maximiser
[Roche, 2011].
Chapitre 1 Recalage d'images médicales
18
3.5. Information mutuelle et recalage d'image
L'Information Mutuelle (IM) est née du fruit de travail
de Claude Elwood Shannon en1949. En recalage
d'images, l'IM fut utilisée pour la première fois et à la
même année par deux équipes de recherche. Depuis 1995, la
liste des publications qui traitent de cette mesure en recalage ne cesse de
s'allonger, et elle est devenue la mesure de référence en
recalage d'images médicales multimodales d'intensités
inversées [Rubeaux, 2011].
Avant de parler de l'information mutuelle, la notion
d'entropie sera d'abord introduite.
3.5.1 Entropie
L'entropie est la quantité d'information contenue dans
une série d'événements. Une image A est par exemple
constituée d'une série d'événements, des pixels,
ayant tous une probabilité pi d'avoir une intensité
i. Plus une image n'est complexe, plus son entropie 11(A) est grande.
Shannon propose une définition de l'entropie telle que [Lombaert et
Thériault, 2005] :
? = ? ?? log 1 = - ? ? ?? ??? ?? (1.5)
? ??
La première expression montre bien que plus un
élément est rare, plus il a de signification. Si une image est
constituée de pixels de plusieurs tons de gris, l'image transporte une
information plus importante qu'une image d'un ton unique. La définition
de Shannon de l'entropie indique l'information moyenne que l'on peut s'attendre
de chaque élément de l'image [Lombaert et Thériault,
2005].
3.5.2 Entropie conjointe
Si on considère les deux images à recaler comme
deux variables aléatoires X et Y, avec ??,? la
distribution conjointe correspondante. L'entropie conjointe est formulée
comme suit :
???, ?? = ? ?,???,??x, y? log ??,?(x, y) (1.6)
??,?(x, y) est la densité de
probabilité conjointe des 2 images.
En effet l'aspect de l'histogramme conjoint reflète
directement l'entropie conjointe. L'entropie conjointe est une mesure de
dispersion de la distribution conjointe présentée par
l'histogramme conjoint. Plus ce dernier est inhomogène, plus l'entropie
conjointe est élevée, plus l'alignement est médiocre
[Saidonai, 2010].
Chapitre 1 Recalage d'images médicales
19
3.5.3. Information mutuelle
L'information mutuelle MI (A, B) de deux images A, B,
possède 3 définitions équivalentes. Chacune d'elles permet
d'expliquer différemment l'information mutuelle. La première
utilise la différence de l'entropie d'une image A et de l'entropie de la
même image A sachant une autre image B [Lombaert et Thériault,
2005] :
MI (A, B) = H (A) - H (AIB) (1.7)
= H (B) - H (BIA)
Ici, H(A) mesure l'information contenu dans l'image A, tandis
que H(AIB) mesure la quantité d'information contenu dans l'image A
lorsque l'image B est connue. L'information mutuelle correspond donc à
la quantité d'information que l'image B possède sur l'image A, ou
similairement, la quantité d'information que l'image A possède
sur l'image B.
La seconde définition évoque la distance de
Kullback-Leibler [Lombaert et Thériault, 2005] :
MI(A, B) = Ea,b pab log
pab (1.8)
apb
p
Soit la mesure entre la distribution pab des images A
et B et la distribution papb où les images A et B sont
indépendantes. Cette définition de l'information mutuelle mesure
donc la dépendance des images A et B. Il y aura recalage lorsque les
images A et B sont le plus semblables.
La troisième définition de l'information
mutuelle est une combinaison des entropies de deux images,
s'éparées et jointes [Lombaert et Thériault, 2005] :
MI (A, B) = H (A) + H (B) - H (A, B) (1.9)
Les entropies séparées H(A) et H(B)
mesurent la complexité des images A et B. L'entropie jointe H (A,
B) mesure la quantité d'information que les images A et B apportent en
même temps. Si les images A et B sont proches, une image explique bien la
seconde, et l'entropie jointe est minimale.
Studholme a introduit une autre formule
normalisée de l'IM pour éliminer l'effet lié à la
superposition des images sur la mesure [Lombaert et Thériault ,2005]
:
Chapitre 1 Recalage d'images médicales
H(A)+H(B)
MI(X,Y) = (1.10)
H(A, B)
La recherche de la transformation T recalant les images
A(x) et B(T (x)) correspond au maximum de la fonction de coût J(T) = MI
(A, B) [Lombaert et Thériault, 2005].

20
Figure 1.15 L'entropie, l'entropie conjointe et
l'information mutuelle pour deux images A et B
[Saidonai, 2010]
3.5.4. Avantages et limites de l'utilisation de
l'IM
a) Avantages
On peut résumer les avantages de l'utilisation de l'IM
dans les points suivants [Roche, 2011] :
? Elle est mieux adaptée au problème de recalage
multimodal
? Parce qu'elle repose sur des hypothèses faibles
concernant la relation entre les intensités des images, l'information
mutuelle à toutes les apparences d'une mesure de similarité
universelle.
? L'information mutuelle traite les intensités comme
des variables purement qualitatives
c'est à dire sans faire intervenir une relation d'ordre
dans l'espace des intensités.
b) Limites
On peut résumer les avantages de l'utilisation de l'IM
dans les points suivants [Rubeaux, 2011] :
? L'inconvénient majeur de MI, à côté
de la charge calculatoire importante, est le risque de tomber sur des optimums
locaux lors de la phase d'optimisation itérative et les
difficultés confrontées lors de cette phase [Saidonai ,2010].
? Quoique l'information mutuelle soit le critère le plus
généraliste, il est déconseillé de l'utiliser dans
les cas où des mesures plus restrictives peuvent être
utilisées.
Chapitre 1 Recalage d'images médicales
21
? L'IM est reconnue pour être sensible à la zone
de recouvrement partiel des données. En effet, lorsque l'on recale des
images de modalités différentes, par exemple, il arrive qu'une
structure, ou plus généralement qu'une partie des données
présente dans une des images ne le soit pas dans l'autre. C'est la
notion de recouvrement partiel. Plusieurs critères ont été
développés pour répondre à cette
problématique. Le plus connu est sans doute l'Information Mutuelle
Normalisée (IMN).
? Un désagrément reconnu de l'IM est qu'elle ne
fait aucune supposition sur l'information spatiale contenue dans les images
à recaler. Traitant les pixels/voxels des images comme des
réalisations d'une VA, la localisation spatiale de ces pixels n'entre
pas du tout en compte dans l'estimation de l'IM.
? Incorporer une information supplémentaire directement
dans l'IM n'est pas simple, car dans la plupart des cas, cela se traduit par la
définition d'une IM d'un couple de deux vecteurs aléatoires de
dimension 2.
? IM se prémunissant du calcul de l'histogramme
conjoint
4. Recalage et l'imagerie médicale
En imagerie médicale, le mot recalage est apparu dans
le courant des années soixante-dix. Le recalage est le processus qui
vise à apparier des données provenant de sources
différentes. Au début, son utilisation se limitait à la
seule comparaison des examens acquis avec un décalage temporel. Ces
examens provenaient d'une même modalité, en l'occurrence la
tomodensitométrie. Ce type de recalage dit monomodal avait pour but une
évaluation post-traitement.
Les cliniciens peuvent ainsi évaluer la pertinence d'un
traitement en comparant les variations du volume des lésions
traitées. Par contre, le besoin de représenter conjointement des
informations provenant de plusieurs modalités d'acquisition n'est apparu
que vers la fin des années 70, avec l'arrivée de l'IRM. Ce sont
à la fois les propriétés physiques et le rendu de ces
types de modalités qui ont poussé les chercheurs à
combiner les informations fournies par ces techniques, pour pallier le manque
d'imageur couvrant tous les aspects d'une forme étudiée. Ce
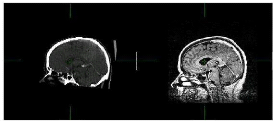
recalage est dit structurel multimodal, puisque les modalités
sollicitées ne mettent en exergue que la structure anatomique des zones
étudiées (Figure. 1.16). Il intervient davantage dans
l'évaluation pré et post-opératoire que dans les
comparaisons diachroniques [Atif, 2004].
Chapitre 1 Recalage d'images médicales
22
Figure 1.16 Recalage Multimodal Structurel :
alignement d'une image TDM sur une image IRM.
Récemment, les chercheurs se sont
intéressés à un nouveau type de recalage dit structurel/
fonctionnel, qui fait appel à la fois à des modalités
structurelles et fonctionnelles comme son nom l'indique (Figure. 1.17).
L'imagerie cérébrale a été et reste le domaine le
plus consommateur de ce type de recalage. Par exemple, pour traiter un patient
épileptique, aussi bien le CT-scanner, l'IRMf où la scintigraphie
est utilisée [Atif, 2004].
La compréhension des processus physiologiques
cérébraux passe aussi par le recalage structurel/fonctionnel. On
peut alors associer une activation cérébrale à une
structure.
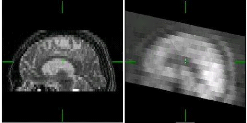
Figure 1.17 Recalage Multimodal
Structurel-Fonctionnel : alignement d'une image TEP
(fonctionnelle) sur une
image IRM-T2 (structurelle).
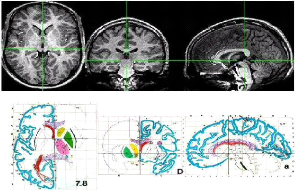
Il existe aussi la classe de recalage dite recalage
données/atlas. Pour des besoins plus liés à la
détection d'anomalies, les données provenant soit d'un seul
imageur, soit d'une fusion multimodale, sont recalées avec un atlas
numérique préalablement établi. L'utilisation de l'atlas
peut aussi servir de critère de recalage comme c'est le cas pour l'atlas
de Talairach/Tournoux (figure 1.18).
Chapitre 1 Recalage d'images médicales
23
Figure 1.18 Recalage multimodal
données/atlas : alignement d'un volume TDM sur l'atlas
anatomique de
Talairach-Tournoux.
Finalement, On peut évoquer le recalage multi-sujet. La
fusion de données provenant de sujets différents est utile pour
la construction d'atlas anatomiques et pour d'éventuelles études
statistiques sur une population. Ce type de recalage est d'autant plus
intéressant qu'il constitue la brique de base de la détection
automatique des anomalies [Atif, 2004].
5. conclusion
Dans ce chapitre on a présenté le
problème de recalage dans l'imagerie médicale : ses principes,
ses types et ses méthodes. Aussi, on a expliqué la notion de
mesure de similarité en donnant à l'information mutuelle plus
d'importance parce qu'on l'a choisi comme mesure de similarité dans
notre travail.
Le problème de recalage peut être formulé
sous forme de problème d'optimisation. La recherche de la solution
optimale est une tâche très couteuse voire impossible à
affecter par les méthodes exhaustives. Ceci a favorisé le
développement des méthodes approchées dont le principe est
de trouver une solution acceptable, qui n'est pas forcement l'optimale mais en
un temps raisonnable, en utilisant des processus stochastiques. Nous allons
utiliser un algorithme d'évolution différentielle pour le
recalage multimodal des images médicales en maximisant l'information
mutuelle. Dans le prochain chapitre nous allons présenter les
problèmes d'optimisation et les métaheuristiques destinées
à la résolution de ces problèmes.
Chapitre 2 :
«J'espère prouver que la nature possède
les moyens et les facultés qui lui sont nécessaires pour produire
elle-même ce que nous admirons en elle.»
Jean Baptiste de Monet, chevalier de LAMARCK.
1. Chapitre 02 Métaheuristique
d'optimisation
24
Introduction
L'Optimisation est l'une des branches les plus importantes
des mathématiques appliquées modernes, et de nombreuses
recherches. La résolution de problèmes d'optimisation est devenue
un sujet central en recherches opérationnelles. Il existe deux classes
de base des méthodes d'optimisation : exactes et approchées.
Les méthodes exactes sont des méthodes
permettant de trouver une solution optimale en temps fini mais elles sont
incapables de résoudre les problèmes trop complexes parmi les
méthodes exactes on distingue : la programmation dynamique, la
programmation linéaire et les algorithmes avec retour arrière
[Layeb, 2010]. Contrairement aux méthodes exactes, les méthodes
approchées ne procurent pas forcément une solution optimale, mais
seulement une bonne solution (de qualité raisonnable) en un temps de
calcul aussi faible que possible [Troudi, 2006], il existe une partie
importante de méthodes approchées connues sous le nom de
métaheuristiques.
Les métaheuristiques sont des méthodes
approchées d'optimisation basées sur la bio-inspiration.
Plusieurs classifications des métaheuristiques sont été
proposées. La plupart distinguent globalement deux catégories :
les métaheuristiques à base de population et les
métaheuristiques à base de voisinage.
2. Définitions
2.1. Problèmes d'optimisation
Un problème d'optimisation se définit comme un
problème de minimisation ou de maximisation, c'est à dire on
cherche une solution de valeur optimale, minimale, si on minimise la fonction
objectif, ou maximale, si on la maximise [Troudi, 2006].
Il existe plusieurs problèmes d'optimisations :
problème mono ou multi objectif, problème combinatoire ou a
variables continues, problèmes statistiques ou dynamiques, etc.
[Boudieb, 2008].
2.2. Optimum local
Une solution s S est un optimum local si et seulement
si' il n'existe pas de solution 0 voisinage v(s) de s, dont
l'évaluation est de meilleure qualité que s, soit
[Devarenne, 2007 ; Layeb, 2010]:
Chapitre 02 Métaheuristique d'optimisation
25
|
s0 ( )
|
s0 Dans le cas problème de minimisation
s0 Dans le cas d un probleme de maximisation
avec l ensembledes solution voisines de
|
2.3. Optimum global
Une solution est un optimum global à un problème
d'optimisation s'il n'existe pas d'autres solutions de meilleure
qualité. La solution s* S est un optimum global si et seulement
si :
s ?S Dans le cas d'un problème de minimisation
Dans le cas d'un probleme de maximisation
La figure 1.3 schématise la courbe d'une fonction
d'évaluation en faisant apparaître l'optimum global et local
[Devarenne, 2007 ; Layeb, 2010].
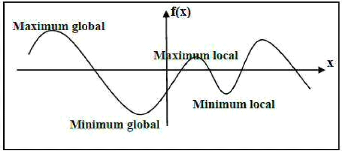
Figure 2.1 Optima locaux et optima globaux
d'une fonction a une variable.
3. Métaheuristiques
Les métaheuristiques sont des algorithmes stochastiques
itératifs qui progressent vers un optimum global. Il existe de
nombreuses métaheuristiques allant de la simple recherche locale
à des algorithmes plus complexes de recherche globale [Layeb, 2010].
Donc on peut distinguer deux catégories des méthodes heuristiques
: les méthodes locales et les méthodes globales.
Les méthodes locales celles qui convergent vers un
minimum local. Ces méthodes, appelées aussi méthodes de
recherche par voisinages [Layeb, 2010]. On trouve plusieurs méthodes
locales parmi elles on peut citer : le recuit simulé, la recherche
tabou, etc.
Chapitre 02 Métaheuristique d'optimisation
26
Les méthodes globales sont des méthodes qui
permettent d'atteindre un ou plusieurs optima globaux. Ces méthodes sont
appelées aussi méthodes à base de population [Layeb,
2010]. Parmi elles on peut distinguer : les algorithmes
génétiques, les algorithmes à évolution
différentielle, les colonies de fourmis, etc.
4. Classification des métaheuristiques
On distingue plusieurs classifications des
métaheuristiques dans ce chapitre nous présentons une
classification mono objectif des métaheuristiques d'optimisation. La
figure 2.2 résume cette classification.
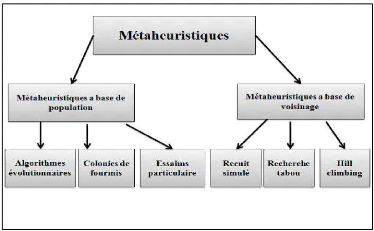
Figure 2.2 Classification des
métaheuristiques [Collette, 2002 ; Troudi, 2006].
4.1. Métaheuristique a base de
population
Les méthodes à base de population utilisent la
population comme un facteur de diversité. Parmi ces méthodes on
distingue les algorithmes évolutionnaires (algorithmes
génétiques, algorithme a évolution differentielle), les
colonies de fourmis, les algorithmes basés sur l'essaim de particule,
etc .
4.1.1. Algorithmes evolutionnaires
Les Algorithmes Evolutionnaires (AEs), sont des algorithmes
basés sur le concept de la selection naturelle élaborée
par Charles Darwin [Koza, 1999]. On distingue quatre types d'AEs : les
algorithmes genetiques(AG), les strategies d'évolution (SE), la
programmation
Chapitre 02 Métaheuristique d'optimisation
27
évolutionnaire (PE) et la programmation
génétique (PG) [Benlahrache, 2007]. Dans ce qui suit, nous
présentons les algoritmes génetiques et les algorithmes a
évolution différantielle.
A. Algorithmes génétiques
Les algorithmes génétiques sont une abstraction
de la théorie de l'évolution. Ce sont des algorithmes
d'optimisation stochastique (aléatoire) fondés sur les
mécanismes de la sélection naturelle de Darwin et sur
les méthodes de combinaison des gènes introduites par Mendel
pour traiter des problèmes d'optimisation.
Les algorithmes génétiques sont appliques dans
des différents domaines comme : L'optimisation de fonctions
numériques difficiles (discontinues, etc.), traitement d'images
(alignement de photos satellites, reconnaissance de suspects, etc.),
optimisation d'emplois du temps, apprentissage des réseaux de neurones,
etc.
A .1.Éléments des algorithmes
génétiques
Gène: Un gène est le
plus petit élément dans l'AG. Généralement, il
correspond à un seul symbole (0 ou 1 dans le cas de codage binaire).
Chromosome : Un chromosome est
constitué d'une suite finis de gènes.
Individu : un individu est une forme
qui est le produit de l'activité des gènes. Pour un AG, il est
réduit à un chromosome et on l'appelle donc chromosome ou
individu pour désigner un même objet [Laboudi, 2009].
Population : une population est un
ensemble d'individus.
Génération: une
génération est un ensemble des opérations qui permettent
de passer d'une population à une autre. Ces opérations sont :
sélection des individus de la population courante, croisement, mutation
et enfin l'évaluation des individus de la nouvelle population.
A.2. Fonctionnement générale d'un
algorithme génétique
Le principe général du fonctionnement d'un
algorithme génétique standard est présenté par
l'algorithme suivant [Souquet et Radet, 2004]:
Chapitre 02 Métaheuristique d'optimisation
28
Algorithme 2.1 : Algorithme
évolutionnaire génétique
Début
Initialiser la population initiale P.
Évaluer P.
Tant Que(Pas Convergence) faire
P ' = Sélection des Parents dans P
P ' = Appliquer Opérateur de Croisement sur P '
P ' = Appliquer Opérateur de Mutation sur P '
P = Remplacer les Anciens de P par leurs Descendants de P '
Évaluer P
Fin Tant Que
Fin
A.3.Mécanismes de fonctionnement d'un AG
A.3.1.Codage des chromosomes
Les chromosomes de la population doivent être
codés selon le problème présent, donc le choix de codage
est très important. Parmi les techniques utilisées pour coder les
individus, on distingue les codages : binaire et réel.
? Codage binaire
Le codage binaire permet de coder le chromosome par une chaine
binaire, chaque gène de ce chromosome est représenté par
une valeur binaire 0 ou 1. Certainement, ce codage le plus utilisé car
il possède plusieurs avantages, parmi lesquels, on trouve qu'il permet
la création d'opérateurs de croisement et de mutation
facilement.
Figure 2.3 Codage binaire d'un chromosome.
? Codage réels
Ce type de codage permet d'utiliser des nombres réels
pour coder les gènes des individus de la population. Le codage
réel est plus pratique que le codage binaire car, il est plus proche
à l'environnement des problèmes à résoudre.
Chapitre 02 Métaheuristique d'optimisation
29
Figure 2.4 Codage réel d'un
chromosome.
A.3.2. Initialisation de la population
L'initialisation sert à constituer la population
initiale. C'est une étape très importante car si la population
n'est par uniformément répartis au départ,
l'évolution risque de se concentrer sur un optimum local [Labed,
2006].
A.3. 3.Évaluation
Pendant les étapes d'évaluation, la fonction
d'évaluation est calculée pour chaque individu, le but est
d'évaluer chaque individu par rapport à un problème
donné. Les individus ayant la valeur de la fitness la plus
élevée seront appelés les meilleurs individus, le choix
d'une fonction d'évaluation appropriée au problème est
critique [Labed, 2006].
A.3.4.Sélection des parents
L'idée générale de cette étape
basée sur la sélection parmi est que tous les individus de la
population les parent qui assureront la reproduction, la probabilité de
survivre d'un individu sera directement relié à son
efficacité au sein de la population. Il existe des différents
principes de sélection, parmi eux on peut citer:
? Sélection par roulette Wheel (loterie
biaisée)
La sélection par roulette est basée sur la
division de la roulette en secteurs, chaque secteur correspond à un
individu, en tourne la roulette n fois pour sélectionner n
individus. Les individus ayant la plus grande valeur de fitness auront
plus de chance d'être choisis [Souquet et Radet, 2004].
? Sélection élitiste
Cette méthode consiste à sélectionner les
meilleurs n individus de la population après l'avoir
triée de manière décroissante selon leurs fitness [Souquet
et Radet, 2004].
? Sélection par tournois
Cette méthode consiste à sélectionner
deux individus aléatoirement pour s'évaluer, puis on
sélectionner le meilleur individu et on répète ce
processus n fois pour obtenir n individus de population
P. La variance de cette technique est élevée [Souquet et
Radet, 2004 ; Laboudi,
Chapitre 02 Métaheuristique d'optimisation
30
2009]. En effet, on peut accorder plus ou moins de chance aux
individus peu adaptés [Laboudi, 2009].
A.3.5.Croisement
Pour enrichir la diversité de la population il faut
faire un croisement, car s'il n y a pas de croisement les enfants sont
exactement des copies de leurs parents. L'operateur de croisement se
déroule en trois étapes : au début il faut faire un choix
aléatoire de deux parents et on choisir un ou plusieurs points de
croisements, ensuite on échange les valeurs des deux parents par rapport
de ce point de croisement. Il existe plusieurs types de croisement à
point, à 2point ou à plusieurs points.
A.3.6.Mutation
L'operateur de mutation consiste à modifier
aléatoirement avec une certaine probabilité la valeur d'un
gène à partir d'une seule chaîne initiale, cet
opérateur garantit la diversité de la population. On distingue
plusieurs types de mutation selon le type de codage utilisé, dans le
codage binaire il consiste simplement à changer un 0 en un 1 ou
l'inverse. La probabilité Pm de mutation est
généralement choisi très faible (?comprise entre 0.01 et
0.001) [Souquet et Radet, 2004].
A.3.7.Remplacement
Cet opérateur est basé, comme l'opérateur
de sélection, sur la fitness des individus. Son rôle consiste
à déterminer les chromosomes parmi la population courante
constituant la population de la génération suivante. Cette
opération est appliquée après l'application successive des
opérateurs de sélection, de croisement et de mutation. On trouve
essentiellement 2 méthodes de remplacement différentes : Le
remplacement stationnaire et le remplacement élitiste.
A.4.Critères d'arrêts
Pour arrêter l'algorithme génétique il ya
plusieurs critères d'arrêt sont possibles. On peut arrêter
l'algorithme s'il n'y a pas un changement de la fonction de fitness d'une
population pour un nombre de génération spécifié.
On peut aussi arrêter l'algorithme lorsque le nombre de
génération est atteint ou lorsque le temps spécifique
s'écoule.
Chapitre 02 Métaheuristique d'optimisation
31
Chapitre 02 Métaheuristique d'optimisation
A.5.Avantages et désavantages d'AG
a) Avantages d'AG
On peut citer les avantages d'AGs dans les points suivants
[Moutairou, 2009 ; Whitley, 1994 ; Yoon et al., 1994 ; Draa, 2011]:
- Il fait un bon équilibre entre l'exploration et
l'exploitation de l'espace de recherche. - La recherche de l'optimum est
globale.
b) Désavantages d'AG
On peut citer les limites d'AGs dans les points suivants
[Moutairou, 2009 ; Whitley, 1994 ; Yoon et al., 1994 ; Draa, 2011]
:
- Les algorithmes génétiques convergent
rapidement vers une solution locale dans les premiers stades, mais la
convergence vers une solution optimale peut nécessiter plus de temps.
- La qualité des résultats obtenus est
tributaire de l'ajustement des paramètres de l'algorithme (à
savoir, les probabilités de croisement et de mutation) qui est souvent
empirique.
B. Évolution Différentielle
L'évolution différentielle est un algorithme
développé par Storn et Price en 1995, qui est basé sur
population. Il utilise les mêmes opérateurs de l'algorithme
génétique : croisement, mutation et sélection, car il est
inspiré par ces algorithmes, mais il basé sur une nouvelle
stratégie de mutation. Dans le chapitre suivant nous essayerons
d'étudier cet algorithme en détail, car c'est le noyau de notre
approche pour le recalage.
4.1.2. Optimisation par essaim de
particules
L'optimisation par essaim de particules (en Anglais Particle
Swarm Optimization PSO) est une technique d'optimisation globale
stochastique développée par Eberhart et Kennedy en 1995 [Kennedy
et al., 1995], qui utilise une population de solutions potentielles
(particules) pour développer une solution optimale au problème.
Le degré d'optimalité est mesuré par une fonction fitness
(aptitude) définie par l'utilisateur. Cette technique est
inspirée par le comportement social des essaims d'oiseaux, ces animaux
caractérisent par le concept
32
d'intelligence commune où chaque particule ne
possède qu'une information partielle de son environnement qui
collectivement permet de gérer intelligemment le groupe [Barrette,
2008].
Les particules sont les individus et elles se déplacent
dans l'hyperespace de recherche. Le processus de recherche est basé sur
deux règles [Dutot, Olivier] :
1. Chaque particule est dotée d'une mémoire qui
lui permet de mémoriser le meilleur point par lequel elle est
déjà passée et elle à tendance à retourner
vers ce point.
2. Chaque particule est informée du meilleur point connu
au sein de son voisinage et elle va tendre à aller vers ce point.
? Modèle d'optimisation par essaim de particules
de base
L'essaim se compose d'un certain nombre de particules qui se
déplacent dans l'espace de recherche, chaque particule p
possède deux variables d'état où : x(t) est
la position courante et v(t) est la vitesse courante, il
possède aussi une petite mémoire où : p(t) est la
meilleure position précédente, et g(t)est la meilleure
p(t) de toutes les p?N(p) [Chikhi,
2010].
Les expressions suivantes pour les positions et les vitesses
des particules dans le prochain pas de temps sont données par ces
équations récursives :
|
#177; 1
|
=
|
#177;
|
1 #177; 2
|
2.1
|
|
#177; 1
|
=
|
#177;
|
#177; 1
|
2.2
|
Où , qui limite chaque coordonnée de v(t)
à V= [-vmax, vmax] et
C1, C2 qui
déterminent
l'influence de p(t) et g(t) dans la formule de
mise à jour de vitesse [Chikhi, 2010].
L'algorithme de PSO possède plusieurs avantages. En
effet, est un algorithme simple a implémenter, très efficace dans
la recherche global, facile à paralléliser pour le traitement
concurrent et enfin il possède très peu de paramètres
à régler. Cependant, il possède certaines limites comme le
taux de convergence lente à l'étape de la recherche locale
[Nebti, 2005], et le problème de convergence prématurée
dans le cas où le taux de convergence est rapide.
4.1.3. Optimisation par les colonies de
fourmis
L'optimisation par colonie de fourmis est une technique
d'optimisation basée sur la population. Elle a été
introduite pour la première fois par Dorigo. Les algorithmes de
colonies de fourmis sont nés d'une constatation simple : les insectes
sociaux, et en particulier les fourmis, résolvent naturellement des
problèmes complexes. Un tel comportement est possible
Chapitre 02 Métaheuristique d'optimisation
car les fourmis communiquent entre elles de manière
indirecte par le dépôt de substances chimiques, appelées
phéromones, sur le sol. Ce type de communication indirecte est
appelé stigmergie1 [Cooren, 2008].
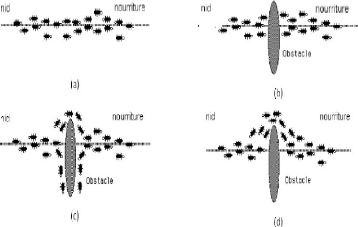
La principale illustration de ce constat est donnée par
la « Figure 2.14 ». On voit sur cette Figure que, si un obstacle est
introduit sur le chemin des fourmis, les fourmis vont, après une phase
de recherche, avoir tendance à toutes emprunter le plus court chemin
entre le nid et l'obstacle. Plus le taux de phéromone à un
endroit donné est important, plus une fourmi va avoir tendance à
être attirée par cette zone. Les fourmis qui sont arrivées
le plus rapidement au nid en passant par la source de nourriture sont celles
qui ont emprunté la branche la plus courte du trajet. Il en
découle donc que la quantité de phéromones sur ce trajet
est plus importante que sur le trajet plus long.
Ces algorithmes utilisés pour résoudre plusieurs
problèmes comme le problème de voyageurs de commerce.
33
Figure 2.5 Détermination du plus court
chemin par une colonie de fourmis. (a) Situation initiale, (b) Introduction
d'un obstacle, (c) Recherche du chemin optimal, (d) Prédominance du
chemin optimal.
1Interactions sociales indirectes
Chapitre 02 Métaheuristique d'optimisation
34
Chapitre 02 Métaheuristique d'optimisation
35
Algorithme 2.2 : optimisation par colonies de
fourmis
Début
Initialiser les traces à 0 pour toute décision
possible d
Tant qu'aucun critère
d'arrêt n'est satisfait faire
Construire AI solutions en tenant compte de la force gloutonne et
de la trace
Mettre à jour les traces ainsi que la meilleure solution
rencontrée;
Fin tant que
Fin
4.2.Métaheuristique a base de
voisinage
Les méthodes à base de voisinage (ou
méthodes de recherche locale) sont des méthodes qui travaillent
sur un seul point de l'espace de recherche à un instant donné.
4.2.1. Recuit simulé
La méthode du Recuit Simulé (RS) a
été proposée par des chercheurs d'IBM en 1983 [KIR, 83],
cette méthode est une technique de recherche locale fondée sur
une analogie entre un processus physique (recuit) et le problème
d'optimisation. Cette méthode en tant que métaheuristique
s'appuie en effet sur des travaux visant a simulé l'évolution
d'un solide vers son état d'énergie minimale.
Le recuit simulé s'appuie sur l'algorithme de
Métropolis-Hastings, qui permet de décrire l'évolution
d'un système thermodynamique. Par analogie avec le processus physique,
la fonction à minimiser deviendra l'énergie E du
système. On introduit également un paramètre fictif, la
température T du système.
L'algorithme du recuit simulé part d'une solution
donnée, et la modifie itérativement jusqu' à le
refroidissement du système. Les solutions trouvées peuvent
améliorer le critère que l'on cherche à optimiser, on dit
alors qu'on a fait baisser l'énergie du système, comme elles
peuvent les dégrader. Si on accepte une solution améliorant le
critère, on tend ainsi à chercher l'optimum dans le voisinage de
la solution de départ [Layeb, 2010].
La méthode du Recuit Simulé possède
plusieurs avantages, c'est une méthode générale et facile
à programmer et se produit des solutions de bonne qualité, mais
elle peut présenter quelque limite comme le problème de temps de
calcul excessif dans certaines applications et le nombre important de
paramètres à ajuster [Saha, 2010].
Algorithme 2.3Optimisation par le recuit
simulé
Début
Déterminé une configuration aléatoire
S
Choix des mécanismes de perturbation d'une
configuration
Initialiser la température T
Tant que la condition d'arrêt
n'est pas atteinte faire
Tant que là l'équilibre
n'est pas atteint faire
Tirer une nouvelle configuration S'
Appliquer les règles de metropolis
Si f(S') < f(S)
Smin = S'
fmin = f(S')
Fin Si
Fin Tant que
Décroitre la température
Fin Tant que
Fin
4.2.2. Recherche Tabou
La recherche tabou est une métaheuristique de recherche
locale a été présentée par Fred Glover en 1986,
l'idée est de passe d'une solution valide a une autre les deux solutions
sont dites alors voisines. L'ensemble des solutions que l'on peut atteindre
à partir d'une solution s'appellera alors un voisinage.
On commence par l'initialisation d'un liste vide de longueur
maximale, cette liste contiendra tous les mouvements que l'on a
déjà effectué et deviennent donc interdits, cette
méthode permet d'éviter de tomber dans un cycle de mouvement
répétitives, donc à chaque itération, on va choisir
le meilleur mouvement possible dans le voisinage de la solution actuelle sans
faire de mouvement contenus dans la liste tabou «liste de mouvements
interdits».
Dans sa forme de base, l'algorithme de recherche tabou
présente l'avantage de comporter moins de paramètres que
l'algorithme de recuit simulé. Cependant, l'algorithme n'étant
pas toujours performant, il est souvent approprié de lui ajouter des
processus d'intensification et/ou de diversification, qui introduisent de
nouveaux paramètres de contrôle [Glover et al., 1997 ; Cooren,
2008]. L'algorithme général de la recherche tabou est le suivant
[Rodriguez-Tello et al, 2005] :
Chapitre 02 Métaheuristique d'optimisation
Algorithme 2.4Optimisation par la recherche
tabou
Début
S = solution initiate
Best = S
Répéter
Sbest = meilleur voisin de S
si(fitness(Sbest) < fitness (Best))
Alors
Best = Sbest
Mise à jour de la liste Tabou
S = Sbest ;
Jusqu'à(critère de fin est
vérifié)
Retourner Best ;
Fin
4.2.3. Méthode de la Descente
(Hill-Climbing)
Cette méthode est très simple et ancien, elle
procède de manière itérative, en choisissant à
chaque itération un point dans le voisinage de la solution courante.
S'il est meilleur c'est à dire il améliore la solution courante,
il devient la nouvelle solution courante, sinon un autre point est choisi, et
ainsi de suite c'est à dire que ce procédé est
répété aussi long temps que la valeur de la fonction
objectif diminue. La recherche s'interrompe des lors qu'un minimum local de
f est atteint [Troudi, 2006].
La méthode de Hill climbing possède plusieurs
avantages, c'est une méthode intuitive et simple mais
présenté aussi quelque limite comme le problème de minimum
local et la lenteur de la méthode [Layeb, 2010].
Algorithme 2.5 : Optimisation par la
méthode de descente
Début
Générer et évaluer une solution initiale
s
Tant que La condition d'arrêt n'est
pas vérifiée faire
Modifier s pour obtenir s' et évaluer s'
Si (s'est meilleure que s) alors
Remplacer s par s'
Fin si
Fin tant que
Retourner s
Fin
36
Chapitre 02 Métaheuristique d'optimisation
37
4.3 Méthodes hybrides
Une autre façon d'améliorer les performances
d'un algorithme ou de combler certaines de ses lacunes consiste à le
combiner avec une autre heuristique [Talbi, 2000 ; Benlahrache, 2007]. Les
algorithmes hybrides sont considérés parmi les méthodes
les plus puissantes pour résoudre les problèmes d'optimisation.
Cette puissance réside dans la combinaison des deux principes de
recherche de meilleure solution, fondamentalement différents. Il existe
plusieurs types d'hybridation parmi eux, on peut citer: l'hybridation entre les
méthodes de recherche globale et locale, l'hybridation entre les
métaheuristiques et les méthodes exactes et l'exécution en
parallèle qui consiste à lancer en parallèle
l'exécution de la même métaheuristique.
5. Conclusion
Dans ce chapitre nous avons présenté des
méthodes approchées utilisées pour la résolution de
problèmes d'optimisations connues sous le titre de
métaheuristique. Les métaheuristiques sont des méthodes
stochastiques qui visent à résoudre un large panel de
problèmes, le but visé par ces méthodes est d'explorer
l'espace de recherche efficacement afin de déterminer des solutions
(presque) optimales, elles ont rencontrées un vif succès
grâce à leur simplicité d'emploi mais aussi à leur
forte modularité. Malgré les bons effets des
métaheuristiques, elles peuvent donner de mauvais résultats.
La performance d'une métaheuristique dépend de
plusieurs facteurs. La limite majeure de métaheuristique dépend
du paramétrage, car il existe très peu de règles
universelles permettant de connaître le paramétrage idéal
et généralement, seules l'expertise et l'expérience de
l'utilisateur permettront de faire un choix.
Dans le chapitre suivant, nous présentons une
méthode basée-population appelée algorithmes à
évolution différentielle (ED). C'est cette approche qu'on va
étendre pour la résolution du problème de recalage
d'images médicales.
Chapitre 3 :

«If evolution really works, how come mothers only have
two hands? »
Milton Berle
1. Chapitre 3 Évolution
différentielle
38
Introduction
Évolution Différentielle (ED) est une
heuristique de recherche introduite par Storn et Price en 1997. C'est un
algorithme d'optimisation globale simple mais très efficace. Et qui fut
initialement créé pour résoudre des problèmes
continus. L'ED est aussi devenu un outil puissant pour résoudre les
problèmes d'optimisation qui se posent dans les applications
financières (pour l'ajustement des modèles sophistiqués et
pour effectuer la sélection du modèle) [Ardia, Boudt, 2011] et
dans les applications en temps réelle [Draa, 2011].
Dans ce qui suit, nous expliquons l'algorithme à
évolution différentielle, nous donnons ses principes, ses
variantes, ses avantages et ses limites.
2. Principe de l'évolution
différentielle
Évolution différentielle a été
conçue comme une méthode de recherche parallèle, directe,
et stochastique. L'idée générale de cet algorithme est
basée sur l'utilisation d'une nouvelle stratégie de mutation.
Elle consiste à ajouter la différence vectorielle
pondérée entre deux individus à un autre. Ensuite, une
opération de croisement entre l'individu mutant et l'individu
correspondant de la population aura lieux. Finalement, une sélection
gloutonne entre ces deux, le père et le fils, va décider lequel
des deux, ayant la meilleure fitness, survivra dans la prochaine
génération [Draa, 2011].
Dans sa version de base il existe trois paramètres : la
taille de la population NP, le taux de croisement CR et le
facteur de différence F.
Les individus (solutions) sont représentés par
des vecteurs M-dimensionnels de valeurs réelles, où M est le
nombre des paramètres à optimiser et NP est la taille de
la population. Un algorithme à évolution différentielle
peut être présenté comme suit [Ston, price, 1997] :
2.1. Mutation différentielle
Une opération de mutation consiste à
créer un nouvel individu fils correspondant à un individu
père à partir de trois autres individus choisis
aléatoirement selon l'équation (3.1) [Ston, price, 1997] :
, #177;1 = 1, #177; ( 2, 3, ) (3.1)
Où : i, r1, r2, r3 {1,...... NP} sont
des entiers mutuellement différents, et F est un facteur
constant réel positif servant à contrôler la
variation différentielle ( 2, 3, ).
Chapitre 3 Évolution différentielle
Le principe de cette mutation est illustré dans la figure
3.1.
2.2 Croisement différentielle
Le croisement est introduit en vue d'augmenter la
diversité de la population, il combine l'individu mutant obtenu par
l'opération de mutation avec l'individu cible pour
générer
un individu d'essai selon l'équation (3.2) [Ston, price,
1997] :
, 0,1 > (0, ) . (3.2)
39
,
Où : (0, 1) est un nombre aléatoire entre
0 et 1, et CR [0, 1] est le taux de croisement.
L'ajout de la condition 0, . permet d'éviter de
créer des clones en s'assurant que les
nouvelles solutions aient au moins une composante issue du
vecteur mutant [Mathieu, 2008].
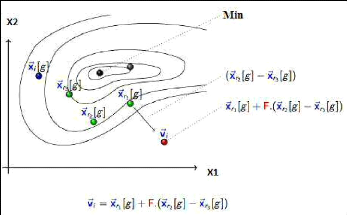
Figure 3.1 Mutation différentielle
[Dutech, 2010].
Ce croisement (développé par Stone et Price) est
appelé croisement binomial. Il existe un autre type de
croisement fréquemment utilisé dans des variantes plus
récentes de l'ED que celle de Storn et Price, c'est le croisement
exponentiel. Dans ce type de croisement, à partir d'une position
choisie aléatoirement, T composants successifs de l'individu
mutant, sont transmis à l'individu d'essai [Draa, 2011], comme le montre
la figure 3.2.
Chapitre 3 Évolution différentielle
40
2.3 Sélection
Pour la sélection, toutes les solutions dans la
population ont la même chance d'être sélectionnées
comme des parents, selon la fonction d'adaptation. La sélection entre
l'individu cible et l'individu d'essai, va décider lequel des deux
individus survivra dans la prochaine génération, selon la
qualité de leurs finesses, comme indiqué dans l'équation
suivante [Ston, price, 1997 ; Draa, 2011 ; Neggaz et Benyettou] :
X= , < ( )
> ( ) (3.3)
,
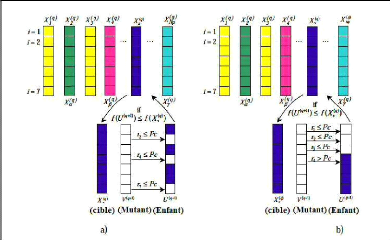
Figure 3.2 Croisement différentiel : a)
croisement binomial, b) croisement exponentiel
[Purcina, Saramago, 2008].
2.4Critère d'arrêts
Le critère d'arrêt d'un AED est
généralement l'un des suivants :
a) Temps écoulé : L'algorithme s'arrête
s'il n'y a pas un changement de la fonction fitness d'une population pour un
nombre de génération spécifié [Kajee-Bagdadi,
2007].
b) L'obtention de la qualité requise de la fonction
d'adaptation [Draa, 2011].
c) Nombre maximal de génération : L'algorithme
s'arrête quand le nombre maximal de génération est atteint
[Kajee-Bagdadi, 2007].
Chapitre 3 Évolution différentielle
Le principe général du fonctionnement d'un
algorithme à évolution différentielle est
présenté par l'algorithme suivant :
Algorithme 3.1 Évolution
différentielle (ED)
,
Début
G 1
Choisir NP, F et CR
PG initialiser la population aléatoirement
Tant que (le critère d'arrêt
n'est pas atteint) Faire Pour (chaque individu , de
PG) Faire
Choisir les parents auxiliaires , , , et
|
Créer l'individu enfant
|
,
|
en utilisant la mutation et le
|
|
Croisement différentiels
Appliquer la sélection + + Meilleur(
Fin
Pour
G G+ 1
Fin tant que Fin
|
,
, , )
|
DE/rand to best /1:
, = , + , , ) + ( 1, 2, . (3.4)
41
3. Variantes pour l'évolution
différentielle
L'algorithme à évolution différentielle
est connu sous la forme DE/x/y/z, où la variable x est
le vecteur de base pour la mutation. La sélection de ce vecteur est
purement aléatoire (rand), mais il existe également deux autres
versions permettant de favoriser le meilleur vecteur (best), (rand-to-best). La
variable y détermine le nombre de vecteurs de
différences utilisés dans la mutation de x. La variable
z est le mode de croisement utilisé, exponentiel (exp) ou
binomial (bin).
Les variantes d'AEDs diffèrent
généralement entre eux par le type de mutation utilisé qui
permet être résumés dans les équations suivants
[Ston, price, 1997 ; Neggaz et Benyettou] :
|
DE/rand/1 :
|
= 3, + 2, . (3.4)
, 1,
|
DE/best /1 : , = , + 2, . (3.4)
1,
|
DE/rand/2 :
DE/best /2 :
|
= 1, + 3, ) + ( 4, 5, . (3.4)
, 2,
= , + 2, ) + ( 3, 4, . (3.4)
, 1,
|
Chapitre 3 Évolution différentielle
Où :
,
42
: Individu de la génération courante G.
x : ensemble de population et F : constante de
mutation [0,2].
, , 1, , 2, , 3, , 4, ,, sont
aléatoirement choisis dans la génération courante.
4. Avantages et limites de l'évolution
différentielle
4.1 Avantages de l'évolution
différentielle
On peut citer les avantages d'évolution
différentielle dans les points suivants [Das et Suganthan, 2011 ; Draa,
2011 ; Karaboga, Okdem, 2004] :
- L'ED est plus simple à implémenter qu'autres
approches évolutionnaires. Pour cette raison est le plus utilisé
par les non-informaticiens.
- Trouver le minimum global réel quel que soit les
valeurs de paramètres initiales et convergence rapide.
- On peut contrôler AED sans difficultés car il
possède un nombre de paramètres de contrôles limité
(CR, F et NP dans la version de base).
- La complexité spatiale de l'ED est réduite,
quand on la compare à d'autres algorithmes performants
célèbres tels que le CMA-ES. Cette caractéristique permet
d'étendre l'ED pour résoudre des problèmes d'optimisation
de grandes dimensions.
- Malgré sa simplicité, l'évolution
différentielle offre des performances remarquablement meilleures que
celles offertes par plusieurs autres approches d'optimisation, notamment les
AEs et le PSO.
4.2 Limites de l'évolution
différentielle
Malgré son efficacité et sa robustesse, l'ED
souffre principalement des limites
suivantes [Draa, 2011] :
- Comme tous autres algorithmes d'optimisation, la performance
d'AED est très
sensibles des valeurs des paramètres F, CR
et NP.
- le choix des paramètres est très dépendant
du problème à résoudre.
- Le problème de convergence prématurée.
- Comme tout autre AE, la performance d'un AED se
détériore avec la croissance de
la dimension de l'espace de recherche.
Chapitre 3 Évolution différentielle
43
? Dans, l'évolution différentielle, le concept de
voisinage, concept clé dans les stratégies d'évolution est
manquant.
5. Conclusion
Dans ce chapitre on a présenté l'évolution
différentielle : ses principes, son comportement général,
quelques variantes de l'évolution différentielle ont
été abordées, ainsi que ses avantages et ses limites.
Dans le chapitre suivant, nous présenterons deux nouveaux
algorithmes à évolution différentielle pour le recalage
d'images, à savoir : un algorithme différentiel
linéairement adaptatif et un algorithme différentiel
périodiquement adaptatif.
Chapitre 4 :


« Savoir où l'on veut aller, c'est très
bien ; mais il faut encore montrer qu'on y va »
Emil ZOLA
1. Chapitre 4 Contributions
44
Introduction
Ce chapitre est consacré à la description de
nos deux contributions, à savoir: adaptation linéaire et
adaptation périodique des paramètres pour le recalage d'images
médicales multimodales. L'application de nos algorithmes pour
déférents types de transformations (rigide, rigide avec zoom et
affine) est décrite dans la première partie du chapitre. Dans sa
deuxième partie, le chapitre analyse et discute les différents
résultats expérimentaux.
2. Formulation de problème
Le problème traité dans ce travail peut
être formulé comme suit. Étant données deux image
I1 et I2 obtenues de capteur identiques (recalage
monomodale), ou différents (recalage multimodal), il s'agit de trouver
la transformation géométrique T qui permet d'aligner correctement
les deux images.
Les algorithmes proposés, basés sur
l'évolution différentielle, permettent d'estimer la
transformation géométrique T. Il s'agit d'une approche iconique
puisque les deux algorithmes considèrent la totalité de
l'information photométrique contenue dans les images.
Pour ce faire, on doit d'abord définir d'une
représentation des solutions adoptée, d'une mesure de
similarité qui permet une évaluation quantitative de la relation
entre deux images lors de leur superposition, et d'une stratégie de
recherche.
2.1. Représentation des individus
Formellement, les individus dans un Algorithme à
Évolution Différentielle (AED) sont représentés par
des vecteurs Narg-dimensionnels de valeurs réelles xi V i E
[1, Np] , où: Narg est le nombre des
paramètres à optimiser et Np est la taille de la
population. La longueur de chaque individu dépend du type de la
transformation recherchée.
Figure 4.1 Un individu pour une Transformation
Similitude.
Chapitre 4 Contributions
45
2.2. Espace de recherche
Nous avons appliqué notre algorithme dans les trois
transformations Suivantes.
2.2.1 Transformation rigide
Dans ce type de transformation qui est la composition d'une
translation et d'une rotation, on a trois paramètres : dx,
dy pour la translation et ? pour la rotation, la nouvelle position
(?', ?') d'un point (?2, ?2) de la deuxième image est
calcule comme suit :
?
?'_ (d?l (c??? ????) (x2) ?' -- \d?l
+ `--???? ????) `Y2) 4.1
Les paramètres dx et dy appartiennent à
l'intervalle [-20, 20] tandis que ? appartient à l'intervalle [-50, 50]
degré. Un individu encode les trois paramètres : dx, dy, ?. Donc
il s'agit alors de chercher dans l'espace R3 les valeurs des
paramètres donnant la meilleure superposition des deux images.
2.2.2 Transformation rigide avec zoom
(similitude)
Cette transformation formée par la combinaison d'une
translation, une rotation et un changement d'échelle S
(agrandissement ou réduction), la nouvelle position de chaque pixel
dans l'image résultante (?', ?') d'un point (?2, ?2) de l'image à
recaler est calcule comme suit :
?
?'\ _ (d?l (c?se
????).(x2)
?')--\"YI+S~ `--???? ????/`?2/ 4.2
Le facteur d'échelle s appartient à
l'intervalle [0, 2]. Un individu encode donc les quatre paramètres : dx,
dy, ? et S. Donc il s'agit alors de chercher dans l'espace
R4 les valeurs des paramètres donnant la meilleure
superposition des deux images.
2.2.3. Transformation affine
Pour la transformation affine, l'individu encode les six
paramètres : ??, ??, ?11 , ?12, ?21, ?22 tel que chaque point dans
l'image I2 est calculé à partir de sont correspondant
dans I1 comme suit :
|
??1 _ (d?l ?' -- \d?) + ?
|
?11
?21
|
?12)
?22/
|
(x2 `Y2?
|
4.3
|
Les paramètres ?11 , ?12, ?21, ?22 appartiennent à
l'intervalle [-2, 2].
Chapitre 4 Contributions
46
2.3. Fonction objectif
Pour l'évaluation d'une transformation, on a besoin
d'une mesure de similarité. Il existe plusieurs mesures de
similarité parmi lesquelles nous citons : le coefficient de
corrélation, le critère quadratique, la corrélation
croisée normalisée, etc. Ces mesures sont simples et facile
à programmer mais ne sont pas adaptées au cas d'un recalage multi
modale où les images ont des structures similaires mais des
caractéristiques différentes. L'information mutuelle est l'une
des mesures adaptée à la comparaison d'images multi sources. Elle
est définie par l'expression :
IM (I1, I2) = H (I1) + H (I2) - H (I1, I2)
Les entropies séparées H(I1) et H(I2) mesurent
la complexité des images I1 et I2. L'entropie jointe H (I1, I2) mesure
la quantité d'information que les images I1 et I2 apportent en
même temps. Comme nous avons dit dans le premier chapitre, L'information
mutuelle est maximale dans le cas d'une totale dépendance, et minimale
dans le cas contraire.
2.4. Stratégie de recherche
L'information mutuelle est maximale dans le cas d'une parfaite
superposition. Donc, l'idée est de définir une stratégie
de recherche ayant pour objectif de maximiser cette mesure. Le problème
revient donc à explorer l'ensemble des paramètres pour maximiser
cette mesure.
3. Contributions
L'algorithme à évolution différentiel de
base, comme déjà mentionné dans le chapitre
précédent, soufre du problème de convergence
prématurée. Par exemple, la figure 4.3 montre l'évolution
de l'information mutuelle équivalente au recalage des images de la
figure 4.2. On peut bien voir que l'algorithme de base souffre du
problème des minima locaux. Ceci est principalement causé par le
fait qu'avec le temps, les individus deviennent égaux à cause de
l'impact de l'opérateur de mutation et donc, la mutation
différentielle sera incapable de créer la diversité au
sein de la population.
Pour résoudre ce problème, on a proposé
deux nouvelles extensions de l'AED. Ces deux variantes sont nommées
respectivement : Evolution Différentielle Linéairement Adaptative
(EDLA) et Evolution Différentielle Périodiquement Adaptative
(EDPA). Dans ce qui suit, ces deux variantes seront expliquées.
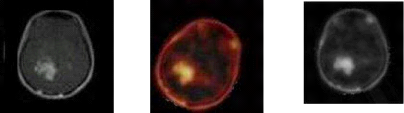
Chapitre 4 Contributions
47
Image de référence Image d'entrée Image
Résultat
Figure 4.2 Recalage rigide multimodale.
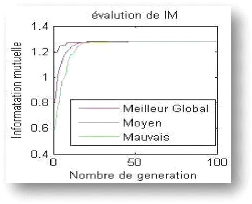
Figure 4.3 Le meilleur global, le moyen et le
minima locaux aux cours du recalage rigide des images de la figure 4.2
3.1. Evolution Différentielle Linéairement
Adaptative (EDLA)
Dans cette variante, nous avons défini les deux facteurs
de mutation (Fd) et de croisement (Fc),
généralement donnés come des constantes dans la version de
base, par les deux équations linéaires suivantes :
?
?? = ????? - ?????? - ????? ? * ??/???? = ????? + ?????? - ?????
? * ??/?? (4.1)
Où ?? ? ?????? , ????? ? = ?0.5,1? et ?? ? ?????? , ?????
? = ?0.5,1?. It : itération en cours et Ng : le nombre
maximum de générations.
Chapitre 4 Contributions
48
On voit bien de cette formule que Fd décroit avec
le temps et Fc accroît avec le temps.
3.2. Evolution différentielle
périodiquement adaptatif (EDPA)
Dans la deuxième de nos contributions, le facteur de
mutation Fd est contrôlé par l'équation
sinusoïdale suivante :
iFd = sjn(f * j) * j/Ng 4.2
Fc = 0
Où : j E{1,...... Ng}; Ng : est le
nombre maximal de génération ; et f est la
fréquence. Le signe de facteur de mutation représente la
direction de graph.
Dans cette contribution nous avons initialisé le facteur
de croisement (Fc) à la valeur 0. Puisque l'équation
périodique est capable de gérer l'équilibre entre
l'exploration et l'exploitation.
Comme le montre la figure 4.4, le facteur Fd change sa
direction d'évolution d'une façon périodique. Ce qui donne
lieu à une bonne balance entre l'exploitation et l'exploration.
L'avantage principal de cette deuxième approche est qu'on
a pu éliminer l'opérateur de croisement de l'algorithme. Donc,
une complexité algorithmique réduite est associé à
cette deuxième variante.
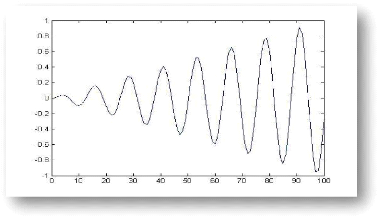
Figure 4.4 Équation sinusoïdale du
facteur Fd
Chapitre 4 Contributions
49
3.3. Résultats expérimentaux
Le but de cette section est d'évaluer les performances
des deux contributions à travers leur application sur des paires d'image
de test. Des comparaisons statistiques sont fournies pour pouvoir comparer nos
approches avec l'algorithme différentiel de base.
3.3.1. Résultats numériques
On présente ici quelques résultats
numériques pour les trois types de transformations rigide, rigide avec
zoom et affine. Pour chaque paire d'image, les algorithmes AED, EDLA et EDPA
sont exécutés 30 fois pour les deux premiers types de recalage et
5 fois pour le cas du recalage affine (car plus de temps de calcul est
nécessaire pour ce dernier). On donne la moyenne (moy),
l'écart type (STD) et le médian (médian)
de la valeur de l'information mutuelle sur l'ensemble des 30 exécutions
ainsi que la meilleure (meilleurIM) et la mauvaise (mauvaisIM) valeur de
l'information mutuelle. Ces résultats sont présentés dans
le tableau 4.1.
? Le choix des paramètres :
Dans l'algorithme de base, Nous avons fixé le facteur
de mutation Fd par la valeur 0.6301 et le facteur de croisement Fc
par la valeur 0.7122. Ces valeurs sont tirées de la
littérature, à base de travaux actant sur le réglage de
paramètres de l'ED de base.
Nous avons utilisé une population (Np) de 20
individus, ces individus sont représentés par des vecteurs de 3,
4 et 6 variables réelles (pour différents types de
transformation). Le nombre d'itérations a été choisi
d'être 20, 50 et 100 pour le recalage rigide, la similitude et l'affine
respectivement.
Les valeurs des paramètres propres aux contributions
sont fixées empiriquement comme suit. Dans la première variante,
EDLA, les bornes supérieures et inférieure des valeurs de Fd
et de l'Fc sont égales à 0.9 et 0.4 respectivement.
Dans la deuxième variante, la fréquence f de
l'équation sinusoïdale est choisie d'être égale
à 1/5.
50
Chapitre 4 Contributions
|
Paire
d'images
|
AED
|
EDLA
|
EDPA
|
|
Moy
|
STD
|
Médian
|
Moy
|
STD
|
Médian
|
Moy
|
STD
|
Médian
|
|
MeilleurIM
|
MeilleurIM
|
MeilleurIM
|
|
MauvaiseIM
|
MauvaiseIM
|
MauvaiseIM
|
|
PI1
|
1.1174
|
0.1043
|
1.1530
1.2169
0.8621
|
1.2777
|
3.4510e-004
|
1.2777
1.2782
1.2771
|
1.2762
|
0.0012
|
1.2765
1.2777
1.2744
|
|
PI2
|
0.9031
|
0
|
0.9031
0.9031
0.9031
|
1.1474
|
0.1581
|
1.2235
1.2360
0.7873
|
0.9480
|
0.0516
|
0.9360
1.0897
0.8772
|
|
PI3
|
1.0142
|
0.0279
|
1.0140
1.0496
0.9718
|
0.5220
|
0.2614
|
0.3536
0.9807
0.4573
|
0.7054
|
0.0974
|
0.7160
0.8542
0.6108
|
Tableau 4. 1 : Résultats
numériques des transformations : rigide et rigide avec zoom et
affine.
Le tableau 4.1 montre bien que les deux nouveaux Algorithmes
EDLA et EDPA ont presque la même performance et donnent dans la
majorité des cas (transformations rigide et similitude) de meilleurs
résultats par rapport à l'ED de base. Aussi, on a gagné un
opérateur dans la deuxième variante, EDPA ; et donc moins de
temps de calcul sera nécessaire avec des performances similaires ou
meilleures que l'algorithme de base.
3.3.2 Analyse qualitative des
résultats
Dans cette section nous donnons quelques résultats
qualitatifs des différentes approches.
a. Recalage rigide
Les figures 4.5 et 4.6 représentent respectivement, une
paire d'images à être recalée et les résultats
d'application des différentes variantes sur cette paire d'images dans le
cas rigide.
Chapitre 4 Contributions

Image référence
Image d'entrée
Figure 4.5 Paire d'image : IRM-Tomographie
calculée à rayon X(CTI).
ADE : IM final : 1.037
EDLA : IM final: 1.034
EDPA : IM final: 1.037
51
Figure 4.6 Recalage rigide des images de la
figure 4.5 par ADE (à gauche), (au milieu) EDLA et
EDPA (à droite).
D'une autre part, les graphes de la figure 4.7 présente
à quel point les deux variantes proposées dans ce travail sont
capable d'offrir un bon compromis entre exploration et exploitation. Il est
claire des graphes de cette figure que la troisième approche est
meilleure dans sa recherche des solutions : elle permet au même temps une
bonne exploration de l'espace de recherche, et une préservation de la
diversité de la population.
Chapitre 4 Contributions
Figure 4.7 les graphes d'IM correspondant aux
images de la figure 4.6 : EDA (à gauche au-dessus), EDLA (à
droite au-dessus) et EDPL (milieu au-dessous)
52
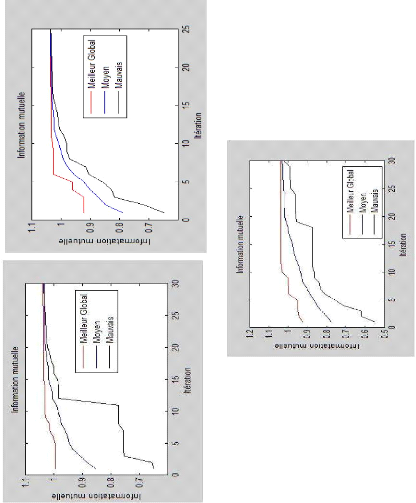
Chapitre 4 Contributions
b. Recalage rigide avec zoom
Les figures 4.8 et 4.9 représentent respectivement, une
paire d'images à être recalée et les résultats
d'application des différentes variantes sur cette paire d'images dans le
cas de similitude. Une autre fois, la figure 4.10 montre la
supériorité de la deuxième variante en termes de garantie
du bon équilibre entre exploitation et exploration.
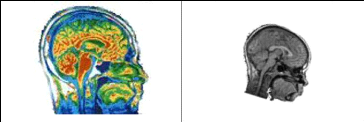
Image référence
Image recalé
Figure 4.8 : Paire d'image à recaler :
à gauche IRM coloré et à droite Scanner.

ADE : IM final : 1.3256
EDLA: IM final : 1,3268
EDPA : IM final : 1.3230
53
Figure 4.9 Recalage rigide avec zoom des
images de la figure 4.8.
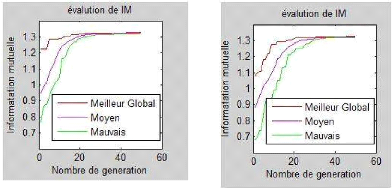
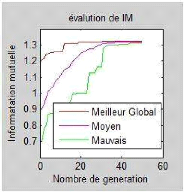
Chapitre 4 Contributions
54
Figure 4.10 les graphes d'IM correspondant aux
images de la figure 4.9: EDB (à gauche au-dessus),
EDLA (à
droite au-dessus) et EDPL (milieu au-dessous).
5. Interface Graphique
Une interface graphique permettant de faciliter la tâche
de réglage de paramètres au médecin, qui n'est pas
familier avec l'outil de développement (Matlab dans ce travail), a
été développée. Cette interface permet :
l'accès aux de images à être recalée, le
réglage des paramètres et le lancement de la recherche de la
meilleure transformation. Les figures 4.11 et 4.12 représente
respectivement l'interface graphique de l'application avant et après
exécution de l'algorithme en question.
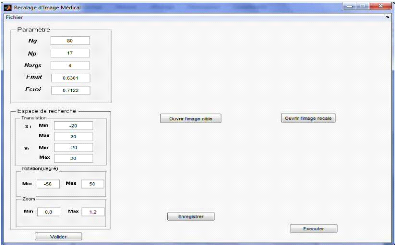
Chapitre 4 Contributions
55
Figure 4.11 : Interface de transformation
similitude avant l'exécution.
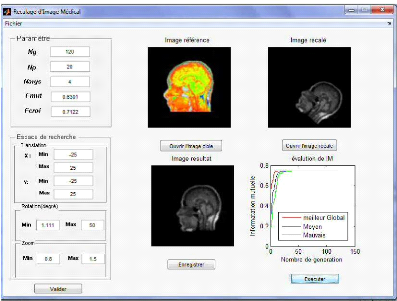
Figure 4.12 : Interface de transformation
similitude après l'exécution.
Chapitre 4 Contributions
56
6. Conclusion
Dans ce chapitre deux nouvelles variantes de l'algorithme
à évolution différentielle pour le recalage d'images
médicales multimodales ont été proposées. Dans la
première variante, une adaptation linéaire du facteur de mutation
et de la probabilité de croisement est adoptée. Dans la
deuxième, on a utilisé une adaptation sinusoïdale du facteur
de mutation, et on n'a pas appliqué le croisement, car la mutation par
facteur d'amplification périodiquement adapté a permis d'assurer
le bon équilibre entre exploitation et exploration. Ceci a donné
lieu à une complexité algorithmique relativement
réduite.
Dans l'ensemble, les résultats expérimentaux ont
montré que les deux approches proposées sont meilleures ou au
moins concurrentes à l'évolution différentielle de base
dans le cas du recalage d'images médicales multimodales.
57
Conclusion générale
Dans ce travail, nous avons traité un problème
d'optimisation très important dans le domaine de traitement et d'analyse
d'images médicales. Il s'agit du recalage d'images médicales
multimodales. Nous avons choisi l'algorithme de l'évolution
différentielle (ED) comme un algorithme d'optimisation de base, et
l'avons étendu pour avoir deux nouvelles variantes: L'évolution
Différentielle Linéairement Adaptative (EDLA) et l'Evolution
Différentielle Périodiquement Adaptative (EDPA).
Une approche iconique basée sur la maximisation de
l'information mutuelle a été adoptée, vu qu'elle est la
plus adaptée au cas des images médicales multimodales.
Les trois variantes, algorithme de base et les deux
contributions, ont été testés sur différentes
paires d'images médicales multimodales. Chaque variante a
été exécuté 30 fois (excepte 5 pour le cas affine)
et la moyenne, l'écart-type et la médiane ont été
calculés. A base de ces mesures statistiques, des comparaisons et des
analyses ont été offertes. Les résultats obtenus ont
démontré que les deux nouvelles variantes sont meilleures dans la
majorité des cas que la variante de base.
Une difficulté majeure qu'on a rencontré lors de
la réalisation de ce travail était le besoin à des
supports de calculs puissants, vu la complexité algorithmique
élevée des approches iconiques (calcul de l'information
mutuelle). Même avec un processeur CORE I5, l'exécution reste trop
lente.
Comme perspective, nous voulons étendre nos
contributions pour la résolution d'autres problèmes réels
ou académiques, ainsi que la réalisation d'une étude plus
fine de leurs performances.
Bibliographie
[Ardia, Boudt, 2011] D. Ardia, K.Boudt, C.Peter, M.Mullen and
B.G. Peterson, « Differential Evolution with DE optimé », the
R Journal Vol. 3/1, ISSN 2073-4859, 2011.
[Atif, 2004] J.Atif, « Recalage non-rigide multimodal des
images radiologiques par Information mutuelle quadratique
normalisée», Thèse de doctorat, Université de Paris
XI - Orsay, 2004.
[Barrette, 2008] M.Barrette, « Methode de Comparaison
Statistique des Performances D'algorithmes Évolutionnaire »,
Mémoire, École de Technologie Supérieure,
Université du Québec 2008.
[Bendiab, 2003] E.Bendiab, « Recalage d'image par
système immunitaires », Mémoire de magistère,
Universite Mentouri, Constantine.
[Benlahrache, 2007] N.Benlahrache, « Optimisation
Multi-Objectif Pour l'Alignement Multiple de Séquences »,
Mémoire de magistère, Université Mentouri, Constantine,
2007.
[Bloch] I.Bloch, « Recalage d'images 2D et 3D »,
Présentation, Ecole Nationale Supérieur des Communications - CNRS
UMR 5141 LTCI, Paris-France.
[Boudieb, 2008] D.boudieb, «Application des algorithmes
évolutionnaires en optimisation géométrique de forme
», Mémoire de magistère, Université M'Hamed Bougara,
Boumerdes, 2008.
[Brown, 1992] L.G.Brown, « A suvery of image registration
techniques », ACM Computing Survey, 1992.
[Cooren, 2008] Y.Cooren, « Perfectionnement d'un
algorithme adaptatif d'Optimisation par Essaim Particulaire. Applications en
génie médical et en électronique », Thèse de
doctorat, Université de Paris, 2008.
[Collette, 2002] Y. Collette et P. Siarry, « Optimisation
multiobjectif. Eyrolles », 2002. [Chikhi, 2010] S.Chikhi, «
systèmes complexes », cours sac master 1 stic, 2010.
[Das et Suganthan, 2011] S.Das, et P. N.Suganthan, «
Differential Evolution: A Survey of the State-of the-Art. », IEEE
Trans. Evolutionary Computation, 2011.
[KIR, 83] S. Kirkpatrick, C.D. Gellat et M.P. Vecchi, «
Optimization by simulated anealing », Science, 1983.
[Devarenne, 2007] I.Devarenne, « Études en recherche
locale adaptative pour l'optimisation combinatoire », Thèse de
doctorat, 2007.
[Draa, 2011] A. Draa , « Modèles pour les
systèmes complexes adaptatifs pour la résolution de
problèmes : Automates cellulaires apprenants quantiques et
évolution différentielle quantique », Thèse de
doctorat, Université Mentouri, Constantine, 2011.
[Dutot, Olivier] A.Dutot, D.Olivier, « Optimisation par
essaim de particules Application au problème des n-Reines»,
document, Université du Havre.
[Dutech, 2010] A.Dutech, « Méta-heuristiques pour
l'optimisation : Differential Evolution et Particle Swarm Optimisation. »,
Séminaire MAIA, LORIA, Mai 2010.
http://www.loria.
fr/~dutech/Papier/pres_optim_maia_100503.pdf.
[Faugeras, 1993] O.Faugeras, « Three Dimensional Computer
Vision. The MIT Press »,1993.
[Frija et Mazoyer, 2002] G.Frija, B.Mazoyer, site web de la
Fondation pour la recherche médicale,
2002. www.frm.org.
[Gardeux, 2008] V.Gardeux, « Recalage d'image et
méthodes d'optimisation », 2008.
[Grova, 2005] C.Grova, « Simulations réalistes de
données de tomographie d'émission monophotonique (TEMP) pour
l'évaluation de méthodes de recalage TEMP/IRM utilisant des
mesures statistiques de similarité : application dans le contexte de la
fusion de données en épilepsie», Thèse de doctorat,
Université De Rennes I, 2005.
[Kajee-Bagdadi, 2007] Z. Kajee-Bagdadi, «Differential
Evolution Algorithms for Constrained Global Optimization», A thesis
submitted to the Faculty of Science, University of the Witwatersrand,
Johannesburg in fulfillment of the requirements for the degree of Master of
Science, 2007.
[Karaboga, OKDEM, 2004] D.Karaboga, S.OKDEM «A Simple and
Global Optimization Algorithm for Engineering Problems: Differential Evolution
Algorithm», Department of Computer Engineering, Erciyes University,
Kayseri-TURKEY, 2004.
[Purcina, Saramago, 2008] L.A.Purcina, P.Saramago, «
Differential Evolution Applied to the Solution of Large Linear Systems »,
In ICEO, 2008.
[Kennedy et al., 1995] J. Kennedy, R.C. Eberhart, « Particle
Swarm Optimisation », Proceedings of the IEEE International Conference on
Neural Networks, IEEE, Press, 1995.
[Koza, 1999] J.R.Koza, Bennett, F.H., Andre, D., and Keane, M.A,
« Genetic Programming III: Darwinian Invention and Problem Solving »,
Morgan Kaufmann, 1999.
[Larousse médicale, 2006] Larousse médicale,
2006.
[Labed, 2006] S.Labed, « Systèmes Complexes
Adaptatifs Application au traitement des images », Université
Mentouri, Constantine, 2006.
[Laboudi, 2009] Z.Laboudi, « Évolution d'automates
cellulaires par algorithmes génétiques quantiques sur un
environnement parallèle », Mémoire de magistère,
Université Mentouri de Constantine, 2009.
[Layeb, 2010] A.Layeb, « Utilisation des Approches
d'Optimisation Combinatoire pour la Vérification des Applications Temps
Réel », Thèse de doctorat, Université Mentouri,
Constantine, 2010.
[Lombaert et Thériault, 2005] H.Lombaert,
J.Thériault, « Recalage par maximisation de l'information mutuelle
», Rapport de projet, Ecole polytechnique de Montréal, 2005.
[Mashoul, 2004] S.Mashoul, « Optimisation par les
systèmes complexes pour le recalage et la mise en correspondance en
analyse d'image », Thèse de doctorat, Université Mentouri,
Constantine, 2004.
[Nebti, 2005] S.Nebti, « Optimisation Par
Écosystème Artificiels : Application à La
Segmentation D'images », Mémoire de
magistère, Université Mentouri, Constantine, 2005.
[Neggaz et Benyettou] N.Neggaz, A.Benyettou, « Recalage
des images médicales par les algorithmes évolutionnaires »,
Article, Université des Sciences et de la Technologie d'Oran, Oran.
[Noblet, 2006] V.Noblet, « Recalage non rigide d'images
cérébrales 3D avec contrainte de conservation de la
topologie», Thèse de doctorat, Université Louis Pasteur,
Strasbourg, 2006.
[Roche, 2011] A.Roche, « Recalage d'images
médicales par inférence statistique» Université de
NICE - SOPHIA ANTIPOLIS, Version 2011.
[Rodriguez-Tello et al, 2005] E.Rodriguez-Tello, and LERIA
J.K. Hao, « Recherche Tabou Réactive pour le Problème de
l'Arrangement Linéaire Minimum », Proceedings of the ROADEF,
2005.
[Rubeaux, 2011] M.Rubeaux, « Approximation de
l'information mutuelle basée sur le développement d'Edgeworth :
application au recalage d'images médicales», Thèse de
doctorat, Université DE RENNES 1 sous le sceau de l'Université
Européenne de Bretagne, 2011.
[Saha] A.Saha, « Résolution des Problèmes
Multi Objectifs à Base de Colonies de Fourmi», Université de
Batna.
[Souquet et F.G .Radet, 2004] A.Souquet, F.G.Radet,
«Algorithmes Génétiques», Thèse de fin
d'année, 2004.
[Ston, Price, 1997] R.Ston, K.Price, «Differential Evolution
- A Simple and Efficient Heuristic for Global Optimization over Continuous
Spaces», Journal of Global Optimization, Kluwer Academic
Publishers, Printed in the Netherlands, 1997.
[Talbi, 2000] E-G.Talbi, «Une taxinomie des
métaheuristiques hybrides», ROADEF'2000, 2000.
[Talbi, 2009] H.Talbi, « Algorithmes
évolutionnaires quantiques pour le recalage et la segmentation multi
objectif d'images », Thèse de doctorat, Université Mentouri,
Constantine, 2009.
[Troudi, 2006] F.Troudi, « Résolution du
problème de l'emploi du temps : Proposition d'un algorithme
évolutionnaire multi objectif », Mémoire de
magistère, Université Mentouri, Constantine 2006.
| 

