1
INTRODUCTION GÉNÉRALE
La révolution informatique nous fait assister à
une croissance technologique qui donne naissance à plusieurs domaines.
L'informatique est devenu une science que tout le monde ne peut s'en
passé. Divers domaines ont vu le jour dans une période
très réduite et ont eu de l'ampleur. Parmi ces domaines nous
citons : l'info+graphie, l'automatisation, le développement web et
autres.
Actuellement, la modernisation a atteint une vitesse de
croisière dans tous les secteurs de la vie, l'importance de
l'automatisme dans le cadre de développement socio-économique
d'un pays, grâce à ces innovations tous les pays cherchent
à innover.
Par ailleurs, il reste à noter qu'avec l'avancée
technologique, il devient possible de mêler deux ou plusieurs
connaissances (domaines) dans le but d'avoir un seul système remplissant
un rôle bien spécifique. Tel est le cas aujourd'hui avec
l'informatique qui fait partie de la quasi-totalité des domaines de la
vie et permet d'obtenir des systèmes hybrides combinant des notions de
la programmation et de l'électronique, on parle ainsi de
l'automatisation.
C'est ainsi, dans le cadre de notre travail de fin de cycle,
nous nous sommes intéressés de travailler sur l'automatisation
dont le sujet s'intitule : Conception et réalisation d'un système
embarqué pour l'ouverture d'une porte automatique d'un
Supermarché.
1. PROBLÉMATIQUE
L'automatisation est considérée comme
étant un progrès technique où apparaissent des dispositifs
électroniques et informatique susceptibles d'exécuter un travail
sans l'intervention humaine, non seulement dans ses efforts musculaires, mais
également dans son travail intellectuel, de surveillance, d'accès
et de contrôle.
Les microcontrôleurs sont aujourd'hui implantés
dans la plupart des applications grand public ou professionnelles et facilitent
ainsi les réalisations avec les systèmes informatiques sans pour
autant omettre la grande partie des composants électroniques.
2
Les agents de sécurité placés à la
porte de supermarché sont appelés à exercés un
travail manuel celui d'ouvrir et de fermer la porte à chaque
entrée et sortie des clients.
Cette façon de faire nécessite un coût
supplémentaire pour la main d'oeuvre et réduit aussi la
sécurité de personnes et de leurs biens.
Ainsi notre réflexion à travers ce travail
scientifique sera focalisée sur les questions ci- après :
? Comment commander une porte automatique ?
? Quel est l'impact d'une porte automatique dans un
supermarché ?
2. HYPOTHÈSES
L'hypothèse est une proposition des réponses
aux questions que l'on se pose en des termes tels que l'observation et
l'analyse puissent fournir une réponse1
En effet, de plus en plus le monde évolue, la
technologie aussi se développe, la carte le microcontrôleur permet
de garantir une gestion efficace dans nos systèmes embarqué et
diminuer le facteur d'encombrement du circuit électronique.
? En effet pour commander cette porte on devrait utiliser de
connaissances d'un système embarque et de l'électronique qui
seraient combiné à la programmation d'un circuit
intégré.
? Son impact serait extrêmement importante dans un
supermarché car la porte automatique porterait des innovations qu'il
n'avait pas auparavant, la sécurité serait bien assurée et
nous aiderait aussi à lutter contre la propagation du corona virus
(COVID 19). Etant donné que les usagers ne seront plus appelés
à toucher les portes par leurs mains.
3. CHOIX ET INTERET DU SUJET 3.1. CHOIX DU
SUJET
En République Démocratique du Congo, la loi
régissant le secteur de l'enseignement supérieur et universitaire
stipule que
1 RONGERE, Cité par MAMBUENI, D ; Manuel de
sociologie éd, Africa, Lubumbashi 1990, P 21
3
l'étudiant prétendant au titre de gradué
doit présenter et défendre, par une soutenance publique un
travail scientifique qu'il doit rédiger sous la direction d'une
autorité morale. C'est donc la première raison qui nous a
poussés à rédiger ce travail de fin de cycle.
Partant de cette exigence, nous avons profondément
réfléchi à parler sur «CONCEPTION ET
REALISATION D'UN SYSTEME EMBARQUE POUR L'OUVERTURE D'UNE PORTE AUTOMATIQUE D'UN
SUPERMARCHE».
Le choix est que, au vu de l'intérêt particulier
que nous portons au travers les techniques appliqués et du souci qui est
le nôtre de pouvoir évoluer dans ce domaine le jour avenir.
3.2. INTÉRÊT DU SUJET
L'intérêt que nous accordons à ce travail
réside essentiellement sur le fait que ceci soit une continuité
de la formation que nous avons eu à bénéficier dans notre
cursus académique.
4. METHODES ET TECHNIQUES UTILISEES 4.1.
METHODES
La méthode désigne un ensemble des
opérations intellectuelles par les quelles une discipline cherche
à atteindre les vérités qu'elle poursuit, les
démontres et les vérifies2.
Dans ce travail nous avons recouru aux méthodes suivantes
:
? La méthode analytique : qui nous a
permis d'analyser les différentes données récoltées
durant la période de recherche.
? La méthode expérimentale :
elle nous a permis de faire l'expérimentation de la solution que nous
proposons pour nous assurer de son efficacité.
4.2. TECHNIQUES
La technique est définie comme un ensemble de
procédés employés pour produire une oeuvre ou obtenir un
résultat déterminé.
2 M GRAWZ, méthode des sciences sociales, Ed.
Paris, 1974, p. 360.
4
? Technique documentaire : nous a
permis de vérifier les archives, de lire les ouvrages (Notes de cours,
TFC, Mémoire etc...) et de faire autres recherches documentaires tel que
consultés les sites web, toujours pour arriver au but ;
? Technique d'interview : qu'elle
nous a permis d'avoir des entretiens ou conversation avec différentes
personnes permanentes de notre champ d'investigation.
5. DELIMITATION DU TRAVAIL 5.1. DANS LE
TEMPS
Les données que nous avons exploitées au cours
de ce travail de fin de cycle ont été observées et
récoltées au cours d'une période allant de Mars 2021
à l'Aout 2021. Ce qui constitue de ce fait l'intervalle temporel de
notre travail de fin d'étude.
5.2. DANS L'EPACE
En ce qui concerne la limite spatiale, notons tout d'abord
que nous n'allons pas aborder toutes les questions liées au
déploiement d'un système automatique, nous nous sommes
concentrées sur la conception et réalisation d'un système
embarqué pour l'ouverture d'une porte automatique d'un
Supermarché.
6. DIVISION DU TRAVAIL
Hormis l'introduction générale et la conclusion
générale notre travail est divisé en trois chapitres
à savoir :
V' Chapitre première :
Généralités sur l'automatisation ;
V' Chapitre deuxième : Notions de base sur les
systèmes embarqué ;
V' Chapitre troisième : Réalisation de la
porte automatique
5
CHAPITRE PREMIER
:
GENERALITÉS SUR L'AUTOMATISATION
I.1 INTRODUCTION
Un système est dit automatisé lorsque le
processus qui permet de passer d'une situation initiale à une situation
finale se fait sans intervention humaine, et que ce comportement est
répétitif chaque fois que les conditions qui caractérisent
la situation initiale sont remplies3.
Comme nous le savons que parmi des objectifs que nous nous
sommes fixé au cours de ce travail est la réalisation d'un
système automatique pour l'ouverture d'une porte, nous avons donc
jugé bon de rédiger tout un chapitre sur les notions
théoriques qui entourent la conception, la réalisation mais aussi
le fonctionnement d'un système automatisé afin de mener à
bien la réalisation du présent travail.
I.2. HISTORIQUE4
I.2.1. point de départ de l'automatisation
L'automatisation a vu les jours à ses origines dans la
construction d'automates, dont les premiers modèles remontent à
l'Antiquité. Héron d'Alexandrie met au point, au
Ier siècle après J.-C. de beaucoup des systèmes
automatiques utilisant les ressources de l'énergie hydraulique. Les
progrès amenés par la mécanique viendront contribuer au
développement de la construction d'automates.
En 1623, le scientifique allemande Wilhelm Schickard
invente la première machine à calculer, qui sera suivie
de celle élaborée par Blaise Pascal dix-neuf ans
plus tard. En 1745, Jacques de Vaucanson conçoit le
premier métier à tisser entièrement automatique, prototype
dont s'inspire le mécanicien français Joseph-Marie
Jacquard pour fabriquer, en 1793, un métier à tisser
dont les séquences d'opérations à effectuer sont inscrites
sur des cartes perforées : l'automatisation appliquée à
l'industrie est née. Elle s'épanouira et se
généralisera à l'ensemble des activités
industrielles dans la première moitié du XXe siècle, en
association avec l'instauration de nouvelles méthodes d'organisation
scientifique du travail, inspirées des travaux de
Taylor5.
3 C.JOSSIN, Automatisation.4ème Chapitre,
Buts_de_l'automatisation, 2014. p1
4
www.automates.fr/automatisation.
Consulté le 20/06/2021 à 19h00.
5 Thomasta, Automatisation. Historique,
https://www.thomasta.com/informatique/automatisation,
consulté le 6 février 2019.
6
Depuis lors, elle ne cessera de se perfectionner grâce
à l'utilisation des techniques issues de l'électronique, de la
robotique et de l'informatique6.
I.2.2. Nouvelles méthodes de travail
Dès la fin du XVIIIème siècle,
la division du travail, c'est-à-dire le découpage d'un processus
de production en plusieurs étapes successives, avait déjà
contribué à un accroissement de la productivité du
travail. La révolution industrielle va accélérer ce
processus. L'identification de tâches élémentaires qui
composent tout cycle de production va permettre de construire des machines
reproduisant les mouvements humains, ouvrant la voie à la constitution
de chaînes de montage et d'assemblage.
Dans les années vingt, ces méthodes seront
largement appliquées dans l'industrie automobile, notamment dans les
usines Ford aux États-Unis, qui mettent en pratique les enseignements
issus du taylorisme. Ce que l'on dénommera l'organisation scientifique
du travail, qui sera appliquée par l'ensemble des constructeurs
automobiles avant d'être généralisée à
l'ensemble de l'industrie, a permis à Ford de réduire
considérablement le nombre d'heures de travail nécessaires
à la fabrication de ses véhicules.7
I.2.3. Essor de l'automatisation
L'utilisation de robots industriels ne représente
qu'une partie, la plus visible sans doute, d'un phénomène de plus
grande envergure qui concerne à la fois l'évolution de
l'organisation du travail et celle des techniques de production8.
I.3. DEFINITION DES CONCEPTS
I.3.1. Système
Un système représente un ensemble
d'éléments ayant une fonction
déterminée9.
6
fr.wikipedia.org/wiki/
Système embarqué. Consulté le 20/06/2021 à
22h15'
7 C.JOSSIN, Automatisation.4ème Chapitre,
Buts_de_l'automatisation. Op.cit.
8 Sammy BAFANDO, Notes des cours d'automatisation, ISIPA/MATADI
2014-2015, p8.
9 Dictionnaire Larousse Edition 2014.
7
I.3.2. Automate
Un automate est un dispositif reproduisant, en autonomie, une
séquence d'actions prédéterminées sans
l'intervention humaine.10
I.3.3. Automatisme
Un automatisme est un sous-ensemble d'une
machine, destinée à remplacer l'action de l'être humain
dans des taches en générales simples et
répétitives, réclamant précision et rigueur. On est
passé d'un système dit manuel, a un système
mécanisé, puis au système automatisé.
Dans l'industrie, les automatismes sont devenus indispensables
: ils permettent d'effectuer quotidiennement les taches les plus ingrates,
répétitives et, dangereuses. Parfois, ces automatismes sont d'une
telle rapidité et d'une telle précision, qu'ils réalisent
des actions impossibles pour un être humain. L'automatisme
est donc synonyme de productivité et de
sécurité.
Ces séquences peuvent êtres figées, le
système fait toujours la même chose, ou s'adapte à des
conditions environnementales perçues par l'intermédiaire de
capteurs.
I.3.4. Automatisation
L'automatisation est l'utilisation des procédés
automatiques visant à réduire ou supprimer l'intervention humaine
dans les processus de production industrielle et de traitement de
l'information.
L'automatisation est aussi considérée comme
l'étape d'un progrès technique où apparaissent des
dispositifs techniques susceptibles de seconder l'homme, non seulement dans ses
efforts musculaires, mais également dans son travail intellectuel de
surveillance et de contrôle.
Ex : L'automatisation d'une usine
I.3.5. Automatique
L'automatique est la science qui étudie les automates.
10 Dictionnaire Larousse Edition 2014. Op.cit.
8
I.3.6. Système Automatisé
Un système automatisé est un ensemble
d'éléments en interaction et organisés dans un but
précis : agir sur une matière d'oeuvre afin de lui donner une
valeur ajoutée. Le système automatisé est soumis à
des contraintes : énergétiques, de configuration, de
réglage et d'exploitation qui interviennent dans tous les modes de
marche et d'arrêt du système11.
|
CONTRAINTES
|
|
|
|
Matière d'oeuvre
|
SYSTEME
|
|
Matière d'oeuvre
+ Valeur ajouté
|
|
|
|
AUTOMATIQUE
|
|
Fig. I.1 : système automatisé
I.4. OBJECTIF
La compétitivité de l'entreprise et des
produits. Cette compétitivité passe par la qualité, la
maitrise des coûts et l'innovation. Cela induit une disponibilité
à tous les niveaux. On cherche donc à améliorer la
productivité. L'amélioration des conditions de travail, et
surtout la sécurité, fait partie des objectifs de
l'automatisation. Ainsi, les objectifs de l'automatisation sont donc :
? Eliminer les tâches répétitives ; ?
Simplifier le travail de l'homme ;
? Augmenter la sécurité (responsabilité)
;
? Accroître la productivité.
Bref, l'objectif de l'automatisation des systèmes est
de créer des systèmes dans lesquels le recours à l'homme
est le moins possible.
11 KIELA TSASA Théophile, Notes de cours
automatisation 1, ISIPA/MATADI 2019 - 2020, p5.
9
I.5. STRUCTURE D'UN SYSTEME AUTOMATIQUE

Partie Contrôle
IHM/ PUPITRE DE COMMANDE ET
SIGNALISATION
Consigne
DE
Signal
TRAITEMENT DES
INFORMATIONS
Partie Commande
PREACTIONNEURS
Compte- rendu
ENERGIE
Partie Opérative
Ordre
ACTIONNEURS
DETECTEURS
EFFECTEURS
CAPTEURS
Production
Fig. I.2 : structure d'un système
automatisé
I.5.1. Description du schéma
A. Poste de contrôle
Il incorpore des consignes et de des signalisations, puis
permet à l'opérateur de commander le système (marche,
arrêt...). Il permet également de visualiser les différents
états du système à l'aide de voyants, de terminal de
dialogue ou d'interface homme machine (IHM).
B. Partie commande
Elle donne les ordres de fonctionnements à la partie
opérative. Les pré-actionneurs permettent de
commander les actionneurs ; ils assurent le transfert d'énergie
entre la source d'énergie (réseau électrique,
pneumatique...) et les actionneurs12.
12 KIELA DJEMS cours d'autimatisation1. ISIPA/Matadi, 2019-2020,
page8
10
Exemple : relais, électrovanne, distributeur...
Ces pré-actionneurs sont commandés à leur
tour par le bloc traitement des informations. Celui-ci
reçoit les consignes de l'IHM ou du pupitre de commande et les
informations de la partie opérative transmises par les
capteurs/détecteurs. En fonction de ces consignes et de son programme de
gestion des tâches (implanté dans un automate programmable ou un
ordinateur), elle va commander les pré-actionneurs et renvoyer des
informations à l'IHM ou à d'autres systèmes de commande
et/ou de supervision en utilisant un réseau et un
protocole de communication.
C. Partie opérative
La partie opérative d'un automatisme
est le sous-ensemble qui effectue les actions physiques (déplacement,
émission de lumière...), mesure des grandeurs physiques
(température, humidité, luminosité...) et rend compte
à la partie commande. La partie opérative reçoit les
ordres de la partie commande et les exécute. Celle-ci est
généralement composée d'actionneurs, de capteurs,
d'effecteurs et d'un bâti.
Elle agit sur la matière d'oeuvre afin de donner sa
valeur ajoutée.
Les actionneurs (moteurs, vérins)
agissent sur la partie mécanique du système qui agit sur la
matière d'oeuvre. Les capteurs/détecteurs
permettent d'acquérir les divers états du
système.
Exemple : l'ensemble des pompes électriques, des
électrovannes, des capteurs de niveau d'eau et de température est
la partie opérative d'un lave-linge.
I.5.2. Mode de commande
Un système automatisé peut utiliser deux (2)
modes de commande :
? Mode de commande directe ;
? Mode de commande avec compte-rendu d'exécution.
11
A. Mode de commande directe (ou boucle ouverte)

Figure II.3 : mode de commande
directe
La partie commande envoie des ordres à la partie
opérative, mais elle ne vérifie pas s'ils ont bien
été effectués. (Exemple des feux de croisement : le
système ne vérifie pas si les feux se sont bien
allumés).
B. Mode de commande avec compte-rendu d'exécution
(ou boucle fermée)

Fig. I.2 : mode de commande boucle fermée
Ce système est beaucoup plus fiable car le
système vérifie que les ordres donnés ont bien
été effectués.
Exemple d'un passage à niveau : la barrière ne
se lève que si le système est sûr que le train veut bien
passer.
I.5.3. Les pré-actionneurs
Un pré-actionneur permet de distribuer
de l'énergie à un actionneur, ce dernier
convertissant l'énergie reçue en énergie utile.
Comme le montre la figure ci-dessous, la principale fonction
d'un pré-actionneur est de distribuer l'énergie
à un actionneur, sur ordre de la partie
commande.
12
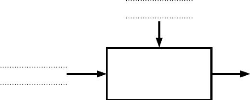
Fig. I.3 : principale fonction d'un
pré-actionneur
La plupart des pré-actionneurs sont dits « tout ou
rien », c'est-à-dire que :
? Soit ils empêchent l'énergie d'aller vers
l'actionneur ;
? Soit ils font passer tout le flux d'énergie
disponible vers l'actionneur.
Ils sont alors soit « ouverts » soit «
fermés », tel un interrupteur : un pré-actionneur tout ou
rien commande l'établissement ou l'interruption de la circulation de
l'énergie entre une source et un actionneur.
Exemples de pré-actionneurs T.O.R. (tout ou rien) :
? Les contacteurs électromagnétiques (les relais) ;
? Les distributeurs pneumatiques.
I.5.4. Les actionneurs
Dans une machine, un actionneur est un organe
qui transforme l'énergie qui lui est fournie en un
phénomène physique utilisable. Ce phénomène
physique fournit un travail qui modifie le comportement ou l'état de la
machine. (Déplacement, dégagement de chaleur, émission de
lumière ...).
Exemples de quelques Actionneurs :
|
C'est un actionneur qui permet, à partir d'un courant
électrique, de faire tourner pas à pas un mécanisme. On
l'utilise, par exemple, dans le lecteur de disquettes d'un ordinateur.
|
13
|
C'est un actionneur qui permet, à partir d'une tension
électrique, d'afficher un numéro compris entre 0 et 9.
C'est un actionneur qui permet, à partir d'un courant
électrique, de produire un signal lumineux. On l'utilise, par exemple,
pour avertir l'utilisateur de l'état de fonctionnement d'une machine.
|
I.5.5. Les capteurs
Un capteur est un dispositif transformant
l'état d'une grandeur physique observé en une grandeur
utilisable, telle qu'une tension électrique, une hauteur de mercure, une
intensité ou la déviation d'une aiguille.
A. Capteurs passifs
Ils ont besoin, dans la plupart des cas, d'apport
d'énergie extérieure pour fonctionner (ex. : thermistance,
photorésistance, potentiomètre, jauge d'extensomètre
appelée aussi jauge de contrainte). Ces sont des capteurs
modélisables par une impédance. Une variation du
phénomène physique étudié (mesuré) engendre
une variation de l'impédance. Il faut leur appliquer une tension pour
obtenir un signal de sortie.
B. Capteurs actifs (ou capteurs directs)
On parle de capteur actif lorsque le phénomène
physique qui est utilisé pour la détermination du mesurande
effectue directement la transformation en grandeur électrique. C'est la
loi physique elle-même qui relie mesurande et grandeur électrique
de sortie.
I.6. LES SYSTEMES EMBARQUE I.6.1 Définition
Un système embarqué est défini comme un
système électronique et informatique autonome, souvent en temps
réel, spécialisé dans une tâche bien précise.
Le terme désigne aussi bien le matériel informatique que le
logiciel utilisé.
14
Ses ressources sont généralement
limitées. Cette limitation est dite grâce à la
réduction du facteur d'encombrement et de la consommation
énergétique.
I.6.2. Contraintes
Les systèmes embarqués exécutent des
tâches prédéfinies et ont une liste des conditions
très exigeantes à remplir, qui peut être d'ordre13
:
? Mémoire : d'espace compté,
ayant un espace mémoire limité de l'ordre de quelques Go maximum
(bien que la taille vienne à être de moins en moins limitée
grâce à la miniaturisation des éléments). Il
convient de concevoir des systèmes embarqués qui répondent
aux besoins au plus juste pour éviter un surcoût ;
? De puissance de calcul : Il convient
d'avoir la puissance de calcul juste nécessaire pour répondre aux
besoins et aux contraintes temporelles de la tâche
prédéfinie. Ceci en vue d'éviter un surcoût de
l'appareil et une consommation excédentaire d'énergie (courant
électrique) ;
? L'espace temporelle : les temps
d'exécution et l'échéance temporelle d'une tâche
sont déterminés (les délais sont connus ou bornés
a priori). Cette dernière contrainte fait que,
généralement, de tels systèmes ont des
propriétés temps réel ;
? D'autonomie énergétique :
Pour des systèmes embarqués autonomes en énergie,
la consommation énergétique doit être la plus faible
possible, due à l'utilisation de batteries et/ou, de panneaux solaires
voire de pile à combustible pour certains prototypes ;
? De sûreté de fonctionnement :
Une moindre défaillance de ces types de systèmes mettent
des vies humaines en danger ou mettent en péril des investissements
importants. Ils sont alors dits « critiques » et ne doivent jamais
faillir. Par « jamais faillir », il faut comprendre toujours donner
des résultats justes, pertinents et ce dans les délais attendus
par les utilisateurs (machines et/ou humains) des dits résultats ;
13 BIYAKA FORTUNE cours d'automatisation2, ISIPA/MATADI,
2019-2020, p4
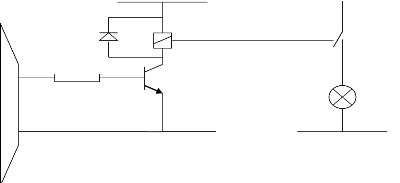
Fig. I.4 : commutateur à transistor sans diode de
protection
15
I.6.3. Architecture
Les systèmes embarqués utilisent
généralement des microprocesseurs à basse consommation
d'énergie ou des microcontrôleurs, dont la partie logicielle est
en partie ou entièrement programmée dans le matériel,
généralement en mémoire dans une mémoire morte
(ROM), EPROM, EEPROM, FLASH, etc. (on parle alors de firmware).
I.7. INTERFACES
La console est un périphérique en communication
directe avec une unité centrale. Elle constitue aussi le pupitre de
commande et de signalisation. Il faut noter qu'il incorpore aussi en son sein
les différents pré-actionneurs qui nous permettent de commander
nos différents actionneurs.
Nous voyons par-là que la console doit porter une carte
électronique qui va jouer l'interface entre la partie opérative
et la partie commande. D'où, dans ce chapitre, nous verrons
successivement les différents circuits de base et les composants
électroniques.
I.7.1. Circuits électroniques de base
Dans ce point, nous allons surtout voir les commutateurs, car
ce sont les circuits les plus utilisés dans le pilotage des processus
extérieurs.
T
K
A
0 V
N
12 V P
D
R
K
A. Commutateurs à simple transistor ?
Sans diodes de protection
16
? La diode D
C'est une diode à silicium, Elle peut être de
type : 1N001, 1N4002, 1N4007. Elle protège le transistor T
contre les tensions négatives produites par la loi de Lens
lorsque le transistor est bloqué.
Par rappel
? Le relais K
C'est un relais solide qui souvent est de 400, 12 V, 10A (5A).
Il joue le rôle du pré-actionneur qui commande l'actionneur A.
? Le transistor T
C'est un transistor NPN, qui être de type BC547, BC107,
BC108, BC109, 2N2222, ...
R
v ? v
b BE
Il est caractérisé par un gain appelé
hfe. Il joue le rôle du pré-actionneur qui commande le relais
k.
? La résistance R
C'est une résistance qui permet de limiter le courant
sur la base de transistor T.
La formule qui permet de calculer la valeur de la
résistance
est :
Avec : Vb : La tension appliquée à la base
VBE : La tension de saturation du transistor
Ib : Le courant de la base, il est calculé par la formule
ci-
dessous
IC
I?
FE
Ic est le courant du collecteur.
17
? Actionneur A
C'est n'importe quel actionneur, il peut être une lampe,
un moteur électrique, un vérin, ...
? Avec diodes de protection
12 V P
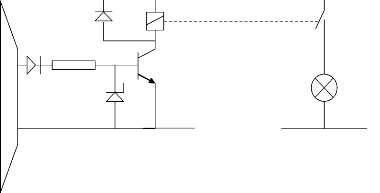
D2
Fig. I.5 : commutateur à transistor avec diode de
protection
D1
R
D3
T
K K
0 V
A
N
? La diode D2
C'est une diode de type 1N4148, qui permet de protéger
l'ordinateur contre les tensions négatives.
? La diode Zener D3
C'est une diode Zener de 5,1 V, elle nous permet de
protéger l'ordinateur contre les tensions supérieures à 5
V.
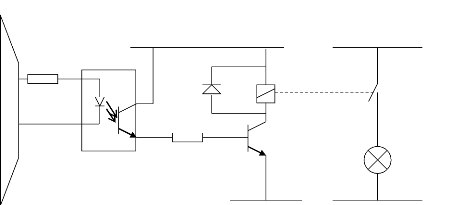
? Commutateurs à Optocoupleur a. Circuit
pour faible courant
12 V
P
D1
R2
T
D3
N
18
R1
IC
K K
A
0
Fig. I.6 : commutateur à optocoupleur pour le faible
courant
V D
? La résistance R1 :
R 1
Elle permet de limiter un courant d'environ 3mA sur la LED
de l'Optocoupleur.
Par rappel une diode a besoin d'une tension de 1,5 à 2V
pour
fonctionner.
Elle est calculée par la formule suivante :
ID
? Circuit intégré IC
C'est un Optocoupleur de type CNY17 ou 4N25. Elle est
composée d'une LED (pattes 1,2) et d'un phototransistor (pattes 4,5).
Son rôle est d'isoler physiquement l'ordinateur et le reste de
montage.
19
b. Circuit pour courant important

K
D
R2
T1
R1
IC
P
N
T2
A
12 V
K
R3
0 V
Fig. I.7 : commutateur à Optocoupleur pour le
courant important
? La résistance R3
La résistance R3 joue comme une
extra-résistante, elle a pour rôle de garantir que T2 ne peut pas
conduire quand il n'y a pas de signal sur l'Optocoupleur.
? Le transistor T1
Le transistor T1 qui de type BC547A, NPN n'est plus
utilisé comme pré-actionneur. Ici il est utilisé comme
amplificateur du courant de la base du transistor T2.
? Le transistor T2
Le T2 est un transistor NPN de puissance qui peut être
soit de type TIP41C (6A 100V), soit 2N3055 (15A 100V) ou n'importe quel autre
transistor de puissance. Il contrôle le courant de la charge et joue le
rôle de pré-actionneur qui commande le relais K
Fig. I.9 : circuit de consigne sans la
résistance
20
I.7.2. Circuits pour consignes
A. Avec la résistance reliée à
positive
R
5 V
S
0
Fig. I.8 : circuit consigne avec la résistance
reliée à positive
? Le commutateur S
C'est élément qui génère une
impulsion au port parallèle. Il peut s'agir d'un interrupteur, un bouton
poussoir, un relais, un Optocoupleur, etc.
? La résistance R
C'est une résistance qui nous permet d'avoir un signal
d'environs 1 mA à l'entrée du port parallèle.
Pour éviter une source extérieure, on peut
recourir soit au port USB ou à une broche du registre de données
du port parallèle.
B. Sans la résistance reliée au
positive
S
21
CONCLUSION PARTIELLE
Dans l'industrie, les automatismes sont devenus indispensables
: ils permettent d'effectuer quotidiennement les tâches les plus
ingrates, répétitives et, dangereuses. Parfois, ces automatismes
sont d'une telle rapidité et d'une telle précision, qu'ils
réalisent des actions impossibles pour un être humain.
L'automatisme est donc synonyme de productivité et de
sécurité.
14 NGIAMBUDULU NZINGA Magloire «Réalisation
d'un système domotique Arduino avec reconnaissance vocale.»
Travail de fin d'étude, Maintenance, ISIPA/Matadi, juillet 2019.
22
CHAPITRE DEUXIEME :
NOTION DE BASE SUR LE SYSTEME EMBARQUE
II.0. Introduction
Nous donnons dans ce chapitre un petit rappel sur les
systèmes embarqués. Ces systèmes électroniques
utilisent les composants électroniques classiques et les composants
à processeur autrement dit les composants analogiques et les composants
numériques. Les systèmes embarqués sont présents
dans notre vie quotidienne et y jouent un rôle important. Grâce
à ses systèmes, nous communiquions à distance, nous nous
déplaçons plus rapidement, nous avons plus de
sécurité et de confort dans nos maisons, etc....
Il est un système électronique et informatique
autonome ne possédant pas des entrées/ sorties standards comme un
clavier ou un écran d'ordinateur. Il est piloté dans la
majorité de cas par un logiciel, qui est complètement
intégré au système qu'il contrôle. Un des premiers
exemples de système embarqué date du début des
années 1960.
Il s'agit de l'ordinateur de bord des vaisseaux spatiaux du
programme Apollo, qui a amené Neil Armstrong sur la
lune. Cet ordinateur contrôlant en temps réel les
paramètres de vol et adaptant la trajectoire14.
II.1. Définitions d'un système
embarqué
Un système embarqué est un système
électronique et informatique qui est spécialisé dans une
tâche bien précise. C'est un système électronique et
informatique particulier, conçu pour effectuer des tâches
spécifiques avec des ressources limitées et des contraintes
variées (consommation d'énergie, espace mémoire restreint,
etc.). Un système embarqué est aussi défini comme
étant un composant électronique issu de la combinaison de
matériel et de logiciel et qui interagit avec son environnement. Ces
systèmes sont dit embarqués, parce qu'ils sont toujours
intégrés dans des systèmes beaucoup plus larges pour y
jouer un rôle bien spécifique. Notons qu'avant l'arrivée
des microprocesseurs, ces systèmes étaient tout simplement
appelés systèmes électroniques et ils étaient
constitués de différents composants classiques reliés
entre eux par des liaisons point à point. La composante logicielle
n'existait pas.
23

Fig. ÉI.1 : Architecture du système
embarqué 15
II.2. Caractéristiques principales d'un
système embarqué16 Les principales
caractéristiques d'un système embarqué sont : > C'est
un système principalement numérique.
> Il dispose des ressources limitées surtout les
mémoires. > Il peut être autonome ou non.
> Il est constitué de logiciel et de
matériel.
> Il ne possède généralement pas
d'entrées/sorties standards tels qu'un port série RS232, USB,
etc. ni de périphériques
classiques comme un clavier d'ordinateur mais plutôt des
périphériques limitées telles que des boutons poussoirs,
des claviers matricielles, des LED, des écrans LCD, etc.
> Il peut être ou non ouvert au monde
extérieure pour des mises à jour ou pour communiquer.
Exemple :
? un distributeur de billet
? un robot
? une carte à puce
? les systèmes de contrôle d'un avion
Les systèmes embarqués ont des impératifs
différents des systèmes informatiques traditionnels. On peut
citer principalement :
15
www.piseinfo.net. Op.cit.
16 EBATA-ATIPO Hugor, BENTOUNSI Mohamed <<
Réalisation et commande d'un Robot détecteur
d'obstacle>> Travail de fin d'étude, Université
Abdelhamid Ibn Badis de Mostaganem, Département de
génie des électronique.
24
· Coût : Le prix de
revient doit être le plus faible possible surtout s'il est produit en
grande série.
· Occupation Mémoire :
D'espace compté, ayant un espace mémoire limité de l'ordre
de quelques Go maximum (bien que la taille vienne à être de moins
en moins limitée grâce à la miniaturisation des
éléments). Il convient de concevoir des systèmes
embarqués qui répondent au besoin au plus juste pour
éviter un surcoût.
· Consommation Energétique
: De consommation énergétique la plus
faible possible, due à l'utilisation de batteries et/ou, de panneaux
solaires voir de pile à combustible pour certain prototypes.
· Puissance de Calcul : De
puissance de calcul. Il convient d'avoir la puissance de calcul juste
nécessaire pour répondre aux besoins et aux contraintes
temporelles de la tâche prédéfinie.
o Ceci en vue d'éviter un surcoût de l'appareil
et une consommation excédentaire d'énergie (courant
électrique).
· Réactivité : Ces
systèmes doivent réagir avec leur environnement à une
vitesse qui est imposée par ce dernier. Ceci induit donc des
impératifs de temps de réponse. C'est pour cette raison ces
systèmes sont aussi appelés systèmes à temps
réel.
· Autonomie : Les
systèmes embarqués doivent en général être
autonomes, c'est-à-dire, remplir leur mission pendant de longues
périodes sans intervention humaine. Cette autonomie est
nécessaire lorsque l'intervention humaine est impossible, mais aussi
lorsque la réaction humaine est trop lente ou insuffisamment faible.
· Criticité : Les
systèmes embarques sont souvent critiques, et les systèmes
critiques sont presque toujours embarqués. En effet, comme un tel
système agit sur un environnement physique, les actions qu'il effectue
sont irrémédiables. Le degré de criticité est
fonction des conséquences des déviations par rapport à un
comportement nominal, conséquences qui peuvent concerner la
sureté des personnes et des biens, la sécurité,
l'accomplissement des missions, la rentabilité économique.
25
? Robustesse, Sécurité et
Fiabilité : L'environnement est souvent hostile, pour des
raisons physiques (chocs, variation de température, impact d'ions lourds
dans les systèmes spéciaux...) ou humaines (malveillance).
C'est pour cela que la sécurité (au sens de
résistance) et la fiabilité (au sens de continuité de
service) sont souvent rattachées à la problématique des
systèmes embarqués17.
II.3. ARCHITECTURE
Les systèmes embarqués utilisent
généralement des microprocesseurs à basse consommation
d'énergie ou des microcontrôleurs, dont la partie logicielle est
en partie ou entièrement programmée dans le matériel,
généralement en mémoire dans une mémoire morte
(ROM), EPROM, EEPROM, FLASH, etc. (on parle alors de firmeware).
II.4. POSTE DE CONTROLE
Certains systèmes embarqués peuvent ne pas avoir
d'interface utilisateur (ils sont alors dédiés à une seule
tâche). Mais cette interface peut également être similaire
à celle d'un système d'exploitation d'ordinateur (par exemple un
PDA).
· Les systèmes les plus simples comportent
uniquement des boutons, des LED.
· Les systèmes les plus complexes peuvent avoir
un écran tactile ou encore un écran comportant des boutons de
façon à minimiser l'espace. La signification des boutons change
selon l'écran et la sélection se fait naturellement en pointant
la fonction désirée.
· Les ordinateurs de poche possèdent en
général un bouton style "joystick" pour la navigation.
· Avec l'explosion du web, les fabricants de
systèmes embarqués ont proposé une nouvelle option : une
interface style page web sur une connexion au réseau. Cela permet
d'éviter le coût d'un système sophistiqué tout en
conservant une interface complète sur un autre ordinateur, quand cela
est nécessaire. Interface couronné de succès pour les
installations permanentes à distance, les routeurs en particulier.
17 BIYAKA BUITA Fortune, Automatisation II,
Cours inédit, TM3, ISIPA-MATADI, 2020-2021 P6.
26
II.5. DOMAINES D'APPLICATION18
Les domaines dans lesquels on trouve des systèmes
embarqués sont de plus en plus nombreux :
· transport : Automobile, Aéronautique (avionique),
etc.
· astronautique : fusée, satellite artificiel, sonde
spatiale, etc.
· militaire : missile
· télécommunication : Set-top box,
téléphonie, routeur, pare-feu, serveur de temps,
téléphone portable, etc.
· électroménager : télévision,
four à micro-ondes
· impression : imprimante multifonctions, photocopieur,
etc.
· informatique : disque dur, Lecteur de disquette, etc.
· multimédia : console de jeux vidéo,
assistant personnel
· guichet automatique bancaire (GAB)
· équipement médical
· automate programmable
· industriel, contrôle- commande
Fig. ÉI.2 : domaine d'application
II.6. LA FAMILLE DES SYTEMES EMBARQUE
Nous distinguons plusieurs familles des systèmes
embarqués mais le plus répandu est
· Microcontrôleur Pic
· Arduino
18 BIYAKA BUITA Fortune, Automatisation II, Cours
inédit, TM3, ISIPA-MATADI, 2020-2021 P7.
27
II.6.1. MICROCONTRÔLEURS PIC II.6.1.1.
Définition
Qu'est-ce qu'un PIC19 ?
(PIC : Programmable Intelligent Contrôler).
- Un PIC n'est rien d'autre qu'un microcontrôleur,
c'est à dire une unité de traitement de l'information de type
microprocesseur à laquelle on a ajouté des
périphériques internes permettant de réaliser des montages
sans nécessiter l'ajout de composants externes.
- Les PICs sont des composants dits RISC (Reduce Instruction
Construction Set), ou encore composant à jeu d'instructions
réduit. Pourquoi ? Et bien, sachez que plus on réduit le nombre
d'instructions, plus facile et plus rapide en est le décodage, et plus
vite le composant fonctionne.
- On trouve sur le marché 2 familles opposées,
les RISC et les CISC (Complex Instructions Construction Set).Chez les CISC, on
diminue la vitesse de traitement, mais les instructions sont plus complexes,
plus puissantes, et donc plus nombreuses. Il s'agit donc d'un choix de
stratégie
Fig. II.3. Microcontrôleur
19 Mr BOUZIANE MUSTAPHA - Mr BESSAIM BENALI <<
études et application du microcontrôleur pic 16f84>> Travail
de fin d'étude, Université de Mascara, Algérie -
Génie électrique et électronique 2007.
20
www.wikipedia.org/microcontrolerpic.
Consulté 23/08/2021 à 19h40'.
28
II.6.1.2. HISTORIQUE
Les microcontrôleurs PIC (ou PICmicro dans la
terminologie du fabricant) forment une famille de microcontrôleurs de la
société Microchip. Ces microcontrôleurs sont
dérivés du PIC1650 développé à l'origine par
la division microélectronique de General Instrument.
Le nom PIC n'est pas officiellement un acronyme, bien que la
traduction en « Peripheral Interface Controller » (contrôleur
d'interface périphérique) soit généralement admise.
Cependant, à l'époque du développement du PIC1650 par
General Instrument, PIC était un acronyme de
« Programmable Intelligent Computer » ou «
Programmable Integrated Circuit ».
II.6.1.3. LES DIFFERENTES FAMILLES DES PICS20
La famille des PICs est subdivisée à l'heure
actuelle en 3 grandes familles :
? La famille Base-Line, qui utilise des mots d'instructions
de 12 bits,
? La famille Mid-Range, qui utilise des mots d'instructions
de 14 bits,
? La famille High-End, qui utilise des mots d'instructions de
16 bits.
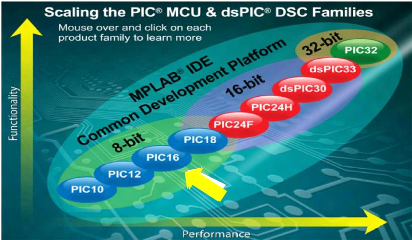
Fig. II.4. Développement et famille des
Pics
29
II.6.1.4. IDENTIFICATION D'UN PIC
Pour identifier un PIC, vous utiliserez simplement son
numéro.
Les 2 premiers chiffres indiquent la catégorie du PIC,
16 indique un PIC Mid-Range.
Vient ensuite parfois une lettre L :
Celle-ci indique que le PIC peut fonctionner avec une plage de tension beaucoup
plus tolérante. Ensuite, vous trouvez :
? C : indique que la mémoire
programme est une EPROM ou plus rarement une EEPROM
? CR : pour indiquer une mémoire de
type ROM. ? F : pour indiquer une mémoire de type
FLASH.
- Notez à ce niveau que seule une mémoire FLASH
ou EEPROM est 21susceptible d'être effacée,
- Puis vous constatez que les derniers chiffres identifient
précisément le PIC (84).
- Finalement vous verrez sur les boîtiers le suffixe
<<-XX >> dans lequel XX représente la fréquence
d'horloge maximale que le PIC peut recevoir. Exemple -04 pour un 4MHz.
- Donc, un 16F84-04 est un PIC Mid-Range (16) donc la
mémoire programme est de type FLASH (F) donc réinscriptible de
type 84 et capable d'accepter une fréquence d'horloge de 4MHz.
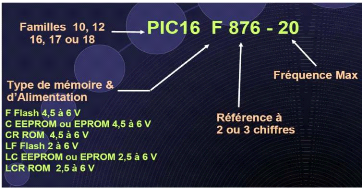
Fig. II.5. Identification des Pics
21EBATA-ATIPO Hugor, Projet fin d'étude
électronique des systèmes embarqués 2018-2019
<<Université Abdelhamid Ibn Badis de Mostaganem >>.
30
II.6.1.5. DEVELOPPEMENT22
Le développement de systèmes embarqués
nécessite des connaissances à la fois en électronique et
en informatique. Parmi le matériel nécessaire pour
réaliser un système embarqué on trouve :
· La documentation (datasheet) sur les composants
utilisés. C'est la première source d'informations pour le
développement !
·
L'outillage de base de l'électronicien (fer à
souder,
insoleuse...)
·
Les outils d'analyse temporelle : oscilloscope, analyseur
logique...
· Des composants de base (résistances,
condensateurs...)
· Un microprocesseur ou un microcontrôleur
· Un Ordinateur personnel
· Un compilateur croisé (dit aussi en anglais
crosscompiler)
? Un programmateur de microcontrôleur ou un
programmateur in-situ
? Un émulateur in-circuit ou ICE (In Circuit Emulator).
Considéré comme l'équipement roi pour le debug
matériel et logiciel (possibilité de déverminer au niveau
de la source du logiciel), cependant il reste coûteux.
II.6.1.6. ENVIRPNEMENT DE PROGRAMMATION
A. LANGUAGE MIKROPASCAL
C'est un des compilateurs croisés les plus
utilisés actuellement. C'est un produit de la société
serbe MIKROELEKTRONIKA.
B. STRUCTURE D'UN PROGRAMME EN MIKROPASCAL
Un programme est un texte que le compilateur va traduire en
fichier hexadécimal. Alors il doit avoir une structure
particulière.
Le texte d'un programme contient au moins trois parties. ?
L'entête
Ne contient qu'une ligne; commence par le mot
réservé « Program » et donne un nom au programme.
22 BIYAKA BUITA Fortune, Automatisation
II, Cours inédit, TM3, ISIPA-MATADI, 2020-2021 p35
31
? Les déclarations
Elles permettent de définir les éléments
utilisés dans le programme.
En effet on devra déclarer les variables
utilisées pour permettre au compilateur d'effectuer les
réservations de mémoire
ainsi que les sous-programmes (Procédures et
fonctions).
? Le corps du programme
Commence par le mot réservé « Begin »
et se termine par le mot réservé "End " suivi d'un point final.
Ce qui suit ce "End" n'est pas pris en compte par le compilateur. Entre "Begin"
et "End" se trouvent les instructions à effectuer par le programme.
II.6.2. ARDUINO
II.6.2.1. Définition d'une carte Arduino23
Le système Arduino est une carte électronique
basée autour d'un microcontrôleur et de composants minimum pour
réaliser des fonctions plus ou moins évoluées à bas
coût. Elle possède une interface usb pour la programmer. C'est une
plateforme open-source qui est basée sur une simple carte à
microcontrôleur (de la famille AVR), et un logiciel,
Véritable environnement de développement
intégré, pour écrire, compiler et transférer le
programme vers la carte à microcontrôleur.
Arduino est une plate-forme de prototypage d'objets
interactifs à usage créatif constituée d'une carte
électronique et d'un environnement de programmation.
Sans tout connaître ni tout comprendre de
l'électronique, cet environnement matériel et logiciel permet
à l'utilisateur de formuler ses projets par l'expérimentation
directe avec l'aide de nombreuses ressources disponibles en ligne.
Pont tendu entre le monde réel et le monde
numérique, Arduino permet d'étendre les capacités de
relations humain/machine ou environnement/machine. Arduino est un projet en
source ouverte (open source)
23
http://www.mon-club-elec.fr.
Consulté le 10/06/2021 à 12h14'.
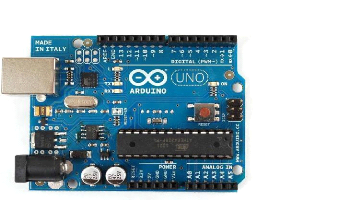
Fig. ÉI.6 : La carte Arduino
32
24 http://www.arduino.cc/. Consulté le 11/07/2021 à
13h14'.
II.6.2.2. Domaine d'utilisation d'une carte Arduino
Physical computing : Au sens large, construire des
systèmes physiques interactifs qui utilisent des logiciels et du
matériel pouvant s'interfacer avec des capteurs et des actionneurs.
Électronique industrielle et embarquée
- Art / Spectacle
- Domotique
- Robotique
- Modélisme
- DIY (Do-It-Yourself), Hacker, Prototypage, Education, Etc.
II.6.2.3. Caractéristiques techniques de l'Arduino
24

Fig. II.7. Partie d'un Arduino
33
Un des modèles les plus répandu de carte Arduino
est l'Arduino UNO (voir Fig.3). C'est la première version stable de
carte Arduino. Elle possède toutes les fonctionnalités d'un
microcontrôleur classique en plus de sa simplicité d'utilisation.
Elle utilise une puce ATmega328P [1] cadencée à 16Mhz. Elle
possède 32ko de mémoire flash destinée à recevoir
le programme, 2ko de SRAM (mémoire vive) et 1 ko.
EEPROM (mémoire morte destinée aux
données). Elle offre 14 pins (broches) d'entrée/sortie
numérique (données acceptée 0 ou dont 6 pouvant
générer des PWM (Pulse Width Modulation, détaillé
plus tard). Elle permet aussi de mesurer des grandeurs, analogiques grâce
à ces 6 entrées analogiques [3]. Chaque broche est capable de
délivré un courant de 40mA pour une tension de 5V. Cette carte
Arduino peut aussi s'alimenter et communiquer avec un ordinateur grâce
à son port USB [4]. On peut aussi l'alimenter avec unes alimentions
comprise en 7V et 12V grâce à sa connecteur Power Jack
Le matériel est « open source, On peut le copier,
le fabriquer et le modifier librement. On peut le copier, le fabriquer et le
modifier librement
On peut l'utiliser et le modifier librement
Sur l'Internet, on trouve :
- Une communauté d'utilisateurs.
- Des guides d'utilisation.
- Des exemples.
- Des forums d'entraide.
- Pas cher.
- Environnement de programmation clair et simple.
II.6.2.4. Partie logique
Le logiciel de programmation des modules Arduino est une
application Java, libre et multiplateformes, servant d'éditeur de code
et de compilateur, et qui peut transférer le firmware et le programme au
travers de la liaison série (RS232, Bluetooth ou USB selon le module).
Il est également possible de se passer de l'interface Arduino, et de
compiler les programmes en ligne de commande. Le langage de programmation
utilisé est le C++, compilé avec avr-g++, et lié à
la bibliothèque de développement Arduino, permettant
l'utilisation de la carte et de ses entrées/sorties. La mise en place de
ce langage standard rend aisé
34
le développement de programmes sur les plates-formes
Arduino, à toute personne maitrisant le C ou le C++.

Fig. II.8. Les shields
Pour la plupart des projets, il est souvent nécessaire
d'ajouter des fonctionnalités aux cartes Arduino. Plutôt que
d'ajouter soit même des composants extérieurs (sur une platine
d'essai, circuit imprimé, etc.), il est possible d'ajouter des
shields. Un shield est une carte que l'on connecte
directement sur la carte Arduino qui a pour but d'ajouter des composants sur la
carte25.
Ces shield viennent généralement avec une
librairie permettant de les contrôler. On retrouve par exemple, des
shields Ethernet, de contrôle de moteur, lecteur de carte SD,
etc.
II.6.2.5. Programmation
La carte Arduino UNO peut être programmée
directement avec « l'Arduino software ». L'Atmega328 sur la carte Uno
est pré programmé avec un `bootloader' qui permet de charger le
code d'une nouvelle application sans utiliser un programmateur hardware
externe. Il communique avec un ordinateur en utilisant le protocole STK500
d'ATMEL. Mais vous pouvez programmer le contrôleur de la carte en
utilisant le port ICSP (In-Circuit Serial Programming). Le code source du
firmware du contrôleur auxiliaire Atmega8U2 est disponible.
25
http://arduino.cc/en/Main/ArduinoWirelessShield.
Consulté le 20 /08/2021 à 19h30'
35
II.7. Conclusion
En guise de conclusion, ce chapitre nous a parlé du
système embarqué. Qui est un système électronique
et informatique autonome, qui est dédié à une tâche
bien précise. Il y a plusieurs domaines application que nous pouvons
retrouver un mécanisme d'un système embarqué en temps
réel.
Dans ce chapitre, nous avons aussi décrit de
façon brève les systèmes embarqués. Nous avons vu
ce qu'est un système embarqué, ses caractéristiques
principales et la famille qui le constitue. Le chapitre suivant nous
amène vers la conception et réalisation de la porte
automatique.
36
CHAPITRE TROISIEME :
REALISATION DE LA PORTE
AUTOMATIQUE
III.0. INTRODUCTION
Depuis que l'automatisation existe, sa croissance est
fulgurante et continue encore aujourd'hui. Si bien que faire de l'intelligence
artificiel est devenu accessible à toutes personnes en ayant l'envie.
Mais, le manque de cours simples sur le net ou en librairie empêche la
satisfaction des futurs électroniciens amateurs ou professionnels et
parfois empêche certains génies à se
révéler.
De ce fait, dans ce chapitre nous présenterons une vue
d'ensembles du dispositif expérimental « Conception et
réalisation de la porte automatique ».
III.1. HISTOIRE DE LA PORTE AUTOMATIQUE
Au 15ème siècle avant
Jésus-Christ, les égyptiens avaient mis en place le premier
système d'arrosage automatique. L'équipement est appelé un
« chadouf » et fonctionne sur le principe d'une
bascule utilisée pour puiser de l'eau sans intervention manuelle et
ainsi, irriguer les terres autour du Nil. On considère cette invention
comme la première automatisation dans le milieu
agricole26.
? L'intervention de Leonard De Vinci
En s'appuyant sur l'existant et en analysant cette
méthode de bascule, Léonard de Vinci développe à
son tour la première porte automatique fonctionnant grâce au
principe du contrepoids (1486).
Cette méthode sera ensuite reprise dans l'ensemble des
châteaux et autres maisons bourgeoises.
360 ans plus tard, c'est au tour de Jean-Eugène
Robert-Houdin qui met au point un système électrique cette
fois-ci, qui lui permet de développer le premier portail
motorisé. Taquin, Robert-Houdin développait également
plusieurs équipements de domotique avec lesquels il équipait ses
jardins pour surprendre ses visiteurs.
26
https://metgroupe.fr/portail-electrique.
Consulté le 24/08/2021 à 17h24.
37
À partir de là, le perfectionnement des portes
et portails électriques n'a jamais cessé son ascension.
Aujourd'hui, il s'agit même d'équipements considérés
comme basiques, avec lesquels on équipe généreusement les
centres commerciaux, les hôpitaux, les résidences, les
institutions...
D'un point de vue technique, les motorisations sont de plus en
plus performantes et adaptables à tous types de portes et portails,
laissant ainsi un large choix aux usagers. Les matériaux utilisés
pour la construction de ces équipements de domotique sont
désormais variés : PVC, bois, aluminium, acier... Tout est
possible.
Enfin, notons également que l'ouverture
électrique contribue non seulement à l'amélioration du
confort de vie pour les particuliers, mais elle possède aussi de
nombreux avantages parallèles :
? Amélioration des systèmes de
sécurité,
? Optimisation de l'hygiène (évite le contact
poignée/mains), ? Praticité.
III.2. OBJECTIF
L'objectif poursuivi dans ce chapitre est d'automatiser un
processus permettant d'ouvrir et fermer automatique la porte, qui avant
était manuelle.

Fig. IÉI.1 : Porte Manuelle
38
III.3. DESCRIPTION DU SCHEMA
III.3.1. PARTIE COMMANDE
Elle donne les ordres de fonctionnement à la partie
opérative. Ils assurent le transfert d'énergie entre la source
d'énergie (réseau électrique...) et les actionneurs.
III.3.2. PARTIE OPERATIVE
La partie opérative est le sous-ensemble
qui effectue les actions physiques et rend compte à la partie commande.
La partie opérative reçoit les ordres de la partie commande et
les exécutes.
Elle agit sur la matière d'oeuvre afin de donner sa valeur
ajoutée.
Les actionneurs (moteurs) agissent sur la partie
mécanique du système qui agit sur la matière
d'oeuvre.27
III.4. PHASE DE DEFINITION DETAILLEE
C `est une phase qui permet de décrire au niveau le
plus bas, les interactions entre les pièces et leur mode de production.
On étudie le système en fonction de son schéma de
circuit.
Dans notre réalisation, nous avions utilisé les
circuits ci-après :
? L'alimentation ; ? Pont en H ;
? Moteur lève vitre ; ? Capteur
ultrason.
III.4.1. L'alimentation 12v et 5v
L'Alimentation de 12v 5Ah permet au système de
fonctionner hors tension elle a pour but de générer du courant
nécessaire au fonctionnement du circuit ; elle sert a alimenté
nos moteurs et notre carte Arduino.28
27 BIYAKA BUITA Fortune, Automatisation I,
Cours inédit, TM2, ISIPA-MATADI, 2019-2020.
28
https://fr.m.wikipedia.org/wiki/pile.
Consulté le 24/08/2021 à 18h08.
29
https://fr.wikipedia.org/wiki/Pont_en_H.
Consulté le 11/10/2021 à 17h55'.
39

Fig. 111.2 : Alimentation 12v et 5 v
III.4.2. Pont en H
Le pont en H est une structure électronique servant
à contrôler la polarité aux bornes d'un dipôle. Il
est composé de quatre éléments de commutation
généralement disposés schématiquement en une forme
de H d'où le nom. Les commutateurs peuvent être des relais, des
transistors, ou autres éléments de commutation en fonction de
l'application visée.
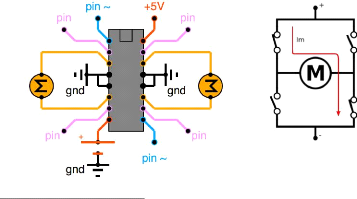
Fig. III.3 : Pont en H
Cette structure se retrouve dans plusieurs applications de
l'électronique de puissance incluant le contrôle des moteurs, les
convertisseurs et hacheurs, ainsi que les onduleurs. Il se présente sous
différentes formes passant par les circuits intégrés pour
les applications de faibles et moyennes puissances, les circuits discrets ainsi
que les modules intégrés pour les moyennes et hautes
puissances29.
40
III.4.3. Lève vitre
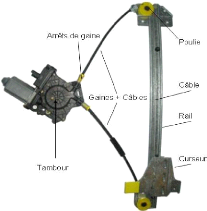
Fig. III.4 : Lève vitre
La lève vitre à commande électrique est
d'abord apparu sur les voitures haut de gamme, pour la raison de
sécurité, la fonction lève vitre électrique n'est
généralement activé que si le contact est mis à 1,
cela constitue avant une mesure de protection sur certaine
véhicule30.
III.4.4. Capteur Ultrason
Le processus complet est le suivant: Mettre le pin "TRIG" une
impulsion de niveau haut (5V) durant au moins 10us et le module démarre
sa lecture; A la fin de la mesure, s'il détecte un objet devant lui, le
pin "ECHO" passe au niveau haut (5V). Et, la distance où se situe
l'obstacle est proportionnelle à la durée de cette
impulsion31.
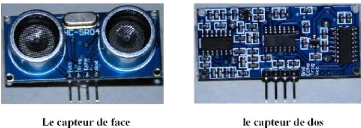
Fig. III.5 : Capteur Ultrason HC-SR04
30
https://fr.wikipedia.org/wiki/Lève_vitre.
Consulté le 11/10/2021 à 19h45'.
31 MOUSSAOUI Amira, Conception et
Réalisation d'un Bras Manipulateur Commandé par l'Arduino
Méga 2560, Mémoire, Université M'hamed Bougara de
Boumerdes, 2016-2017.
41
III.5. REALISATION DE LA PORTE AUTOMATIQUE III.5.1.
Programme
C'est la description fonctionnelle du nouveau système ;
c'est un ensemble des procédures opératoires propres à un
enchainement des actions nécessaires à l'accomplissement d'une
tache. Dans notre réalisation nous avons utilisé le langage de
programmation en C.
III.5.1.1. Les mots-clefs du langage C
Un certain nombre de mots, appelés mots-clefs,
sont réservés pour le langage lui-même et ne peuvent pas
être utilisés comme identificateurs. Le langage C compte 32 mots
clefs : (auto ; const ; double ; float ; int ; short ; struct ;
unsigned ; break ; continue ; else ; for ; long ; signed, switch ; void ; case
; default ; enum ; goto ; register ; sizeof ; typedef ; volatile ; char ; do ;
extern ; if ; return ; static ; union ; while).
Nous pouvons les classées en cinq catégories.
y' Les spécificateurs de stockage :
auto ; register ; static ; extern ; typedef.
y' Les spécificateurs de type : char ;
double ; enum ; float ; int
; long ; short ; signed ; struct ; union ; unsigned ; void.
y' Les qualificateurs de type : const ;
volatile.
y' Les instructions de controls : break ;
case ; continue ; default ; do; else ; for ; goto ; if ; switch ; while.
y' Divers : return ; sizeof.
42
III.5.1.2. Code source avec le logiciel Arduino
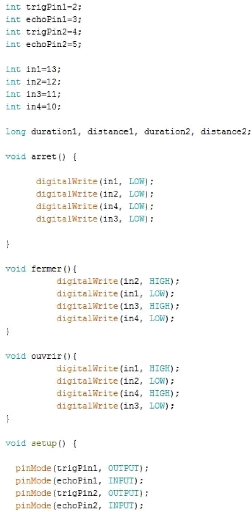
43
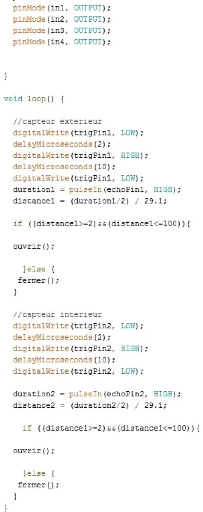
Fig. IÉI.6 : Programme complet du système
réalisé
44
III.5. SCHEMA SYNOPTIQUE DU SYSTEME REALISE
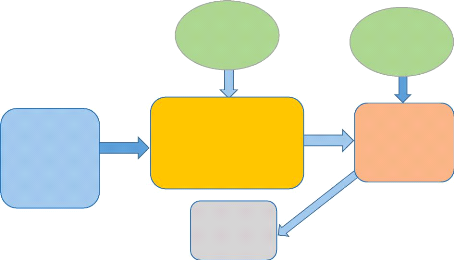
Capteur
de
présences
Arduino UNO
Énergie 5v
Moteurs
Pont en H
Énergie 12v
Fig. 111.7 : Schéma synoptique du système
réalisé
III.6. SCHEMA DE REALISATION

Fig. 111.8 : Schéma réalisé
45
III.7. FONCTIONNEMENT DE LA PORTE AUTOMATIQUE
Au démarrage du système ce sont des capteurs de
présence qui entre enjeux, lorsqu'il détecte la présence,
il envoi l'information au microcontrôleur, à son tour il donne le
consigne au circuit intégré qui est le pont en H permet de
réaliser 2 fonctions qui sont d'inverser le sens de rotation du moteur
en inversant le courant aux bornes du moteur et la variation de la vitesse du
moteur en modulant la tension aux bornes du moteur.
De plus, le pont en H permet d'effectuer un freinage
magnétique s'il est capable d'en dissiper la puissance
générée. Cette opération s'effectue en actionnant
soit les deux commutateurs supérieurs ou inférieurs en même
temps, ce qui court-circuite les bornes du moteur, et le fait par
conséquent freiner.
III.8. EVALUATION DU COUT DE L'ETUDE
|
N°
|
DESIGNATIONS
|
Qte
|
PRIX
UNITAIRE($)
|
PRIX
TOTAL($)
|
|
1
|
ARDUINO
|
1
|
25,00
|
25,00
|
|
2
|
PONT EN H
|
1
|
10,00
|
10,00
|
|
3
|
CAPTEUR ULTRANSON
|
2
|
15,00
|
30,00
|
|
4
|
ALIMENTATION
|
2
|
10,00
|
20,00
|
|
5
|
MOTEUR LEVE VITRE
|
2
|
10,00
|
20,00
|
|
6
|
MAQUETTE
|
1
|
55,00
|
55,00
|
|
TOTAL
|
160,00
|
|
IMPREVU (10%)
|
16,00
|
|
TOTAL 2
|
176,00
|
|
MAIN D'OEUVRE (30%)
|
52,80
|
|
TOTALE GENERALE
|
228,80
|
Fig. IÉI.9 : Gout du projet
Mettre en place ce nouveau système nous demande au
préalable la mise en pratique des notions de système automatique
apprises dans notre cursus de formation en technique de maintenance, dont nous
avons exploité enfin de réaliser un système d'ouverture de
la porte automatique.
46
CONCLUSION GENERAL
Nous sommes enfin au terme de notre travail qui s'intitule
«conception et réalisation d'un système embarqué pour
l'ouverture d'une porte automatique d'un super marché, automatisé
avec un carte Arduino UNO, car ledit travail a éliminé quelques
zones d'ombre de notre connaissance sur les systèmes
automatisés.
Pour arriver au terme de notre travail ayant une durée
de 6 mois, nous l'avons subdivisé en trois chapitres, dont le premier
était basé sur généralités sur
l'automatisation ; le second chapitre nous avons parlé sur notions de
base sur les systèmes, qui prend aujourd'hui son dessein dans le monde
industriel et à la vie courante, dans ce chapitre nous avons
donnés les principes de base pour le développement et la mise en
place d'un système automatique qui est définie étant un
procédé visant à réduire ou supprimer
l'intervention humaine dans les processus de production industrielle et de
traitement de l'information ; et le dernier chapitre la réalisation de
la porte automatique qui nous a permis de bien étudié le
composant que nous avons utilisé et la réalisation du
présent travail.
L'automatisation et l'utilisation des procédés
automatiques visent la réduction ou suppression de l'intervention
humaine dans les processus de production industrielle et de traitement de
l'information. Elles sont aussi considérées comme l'étape
d'un progrès technique où apparaissent des dispositifs techniques
susceptibles de seconder l'homme, non seulement dans ses efforts musculaires,
mais également dans son travail intellectuel de surveillance et de
contrôle.
L'impact de cette technique, serait extrêmement
importante dans un supermarché car la porte automatique porterait des
innovations qu'il n'avait pas auparavant, la sécurité serait bien
assurée et nous aiderait aussi à lutter contre la propagation du
corona virus (COVID 19). Etant donné que les usagers ne seront plus
appelés à toucher les portes par leurs mains.
Notre travail étant une oeuvre humaine, il est sujet
à imperfection et ne manquera certainement pas d'étaler quelques
faiblesses au travers de certains jugements émis. Quant à ce
sujet, les lecteurs nous en accordent indulgence surtout qu'il ne s'agit ici
que d'un apprentissage à la recherche scientifique. Les remarques
47
et suggestions qui sont formulées pour améliorer
nos études futures seront alors les bienvenues.
BIBLIOGRAPHIE
A. Ouvrages
> C.JOSSIN, Automatisation.4ème Chapitre,
Buts_de_l'automatisation, 2014. p1.
> Dictionnaire Larousse Edition 2014.
> M GRAWZ, méthode des sciences sociales, Ed. Paris,
1974, p. 360. > RONGERE, Cité par MAMBUENI, D ; Manuel de sociologie
éd, Africa, Lubumbashi 1990, P 21 ;
B. Travail de fin d'Etudes et
Mémoires
> EBATA-ATIPO Hugor, BENTOUNSI Mohamed <<
Réalisation et commande d'un Robot détecteur
d'obstacle>> Travail de fin d'étude, Université
Abdelhamid Ibn Badis de Mostaganem, Département de génie des
électronique.
> Mr BOUZIANE MUSTAPHA - Mr BESSAIM BENALI <<
études et application du microcontrôleur pic 16f84>> Travail
de fin d'étude, Université de Mascara, Algérie -
Génie électrique et électronique 2007.
> MOUSSAOUI Amira, Conception et Réalisation d'un
Bras Manipulateur Commandé par l'Arduino Méga 2560,
Mémoire, Université M'hamed Bougara de Boumerdes, 2016-2017.
> NGIAMBUDULU NZINGA Magloire «Réalisation d'un
système domotique Arduino avec reconnaissance vocale.» Travail de
fin d'étude, Maintenance, ISIPA/Matadi, juillet 2019.
C. Notes de cours
> BIYAKA FORTUNE cours d'automatisation2, ISIPA/MATADI,
20192020, p4.
> BIYAKA BUITA Fortune, Automatisation I, Cours
inédit, TM2, ISIPA-MATADI, 2019-2020.
> KIELA TSASA Théophile, Notes de cours
automatisation 1, ISIPA/MATADI 2019 - 2020, p5.
> Sammy BAFANDO, Notes des cours d'automatisation,
ISIPA/MATADI 2014-2015, p8.
D. Webographie
>
https://www.thomasta.com/informatique/automatisation.
>
https://www.automates.fr/automatisation.
>
https://fr.wikipedia.org/wiki/
Système embarqué.
>
https://www.piseinfo.net.
>
https://www.wikipedia.org/microcontrolerpic.
>
http://www.mon-club-elec.fr.
>
http://www.arduino.cc/.
48
?
https://metgroupe.fr/portail-electrique.
TABLE DES MATIERES
Epigraphe I
Dédicace II
Remerciement III
Liste des sigles et abréviations ...V
INTRODUCTION GÉNÉRALE 1
1. PROBLÉMATIQUE 1
2. HYPOTHÈSES 2
3. CHOIX ET INTERET DU SUJET 2
3.1. CHOIX DU SUJET 2
3.2. INTÉRÊT DU SUJET 3
4. METHODES ET TECHNIQUES UTILISEES 3
4.1. METHODES 3
4.2. TECHNIQUES 3
5. DELIMITATION DU TRAVAIL 4
5.1. DANS LE TEMPS 4
5.2. DANS L'EPACE 4
6. DIVISION DU TRAVAIL 4
CHAPITRE PREMIER : 5
GENERALITÉS SUR L'AUTOMATISATION 5
I.1 INTRODUCTION 5
I.2. HISTORIQUE 5
I.2.1. point de départ de l'automatisation
5
I.2.2. Nouvelles méthodes de travail 6
I.2.3. Essor de l'automatisation 6
I.3. DEFINITION DES CONCEPTS 6
I.3.1. Système 6
I.3.2. Automate 7
I.3.3. Automatisme 7
I.3.4. Automatisation 7
I.3.5. Automatique 7
I.3.6. Système Automatisé 8
I.4. OBJECTIF 8
I.5. 49
STRUCTURE D'UN SYSTEME AUTOMATIQUE 9
I.5.1. Description du schéma 9
I.5.2. Mode de commande 10
I.5.3. Les pré-actionneurs 11
I.5.4. Les actionneurs 12
I.5.5. Les capteurs 13
I.6. LES SYSTEMES EMBARQUE 13
I.6.1 Définition 13
I.6.2. Contraintes 14
I.6.3. Architecture 15
I.7. INTERFACES 15
I.7.1. Circuits électroniques de base
15
I.7.2. Circuits pour consignes 20
CHAPITRE DEUXIEME : 22
NOTION DE BASE SUR LE SYSTEME EMBARQUE 22
II.0. Introduction 22
II.1. Définitions d'un système
embarqué 22
II.2. Caractéristiques principales d'un
système embarqué 23
II.3. ARCHITECTURE 25
II.4. POSTE DE CONTROLE 25
II.5. DOMAINES D'APPLICATION 26
II.6. LA FAMILLE DES SYTEMES EMBARQUE 26
II.6.1. MICROCONTRÔLEURS PIC 27
II.6.1.2. HISTORIQUE 28
II.6.1.3. LES DIFFERENTES FAMILLES DES PICS
28
II.6.1.4. IDENTIFICATION D'UN PIC 29
II.6.1.5. DEVELOPPEMENT 30
II.6.1.6. ENVIRPNEMENT DE PROGRAMMATION 30
II.6.2. ARDUINO 31
II.7. Conclusion 35
CHAPITRE TROISIEME : 36
REALISATION DE LA PORTE AUTOMATIQUE 36
III.0. INTRODUCTION 36
III.1. HISTOIRE DE LA PORTE AUTOMATIQUE 36
50
III.2. OBJECTIF 37
III.3. DESCRIPTION DU SCHEMA 38
III.3.1. PARTIE COMMANDE 38
III.3.2. PARTIE OPERATIVE 38
III.4. PHASE DE DEFINITION DETAILLEE 38
III.4.1. L'alimentation 12v et 5v 38
III.4.2. Pont en H 39
III.4.3. Lève vitre 40
III.4.4. Capteur Ultrason 40
III.5. REALISATION DE LA PORTE AUTOMATIQUE 41
III.5.1. Programme 41
III.5. SCHEMA SYNOPTIQUE DU SYSTEME REALISE
44
III.6. SCHEMA DE REALISATION 44
III.7. FONCTIONNEMENT DE LA PORTE AUTOMATIQUE
45
III.8. EVALUATION DU COUT DE L'ETUDE 45
CONCLUSION GENERAL 46
BIBLIOGRAPHIE 47
TABLE DES MATIERES 48


