1.2.7.4. Probabilité de détection
La probabilité de détection d'une
réponse dépond de la probabilité de réponse du
transpondeur et du nombre minimal de réponses nécessaire pour
déterminer qu'une cible existe. Ces paramètres sont
relatés par l'expression suivante:
????
???????????? = ~ ????!
????! (???? - ????)! ???????? (1 - ????)????-????
???? =????
Où :
· ???????????? : Probabilité de détection
d'une réponse
· L : Longueur de la fenêtre glissante
· M : Nombre minimal de réponses
· ???? : probabilité de réponse du
transpondeur
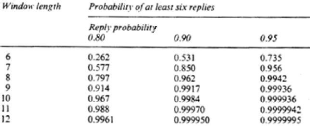
Pour le mode SSR conventionnel la longueur de la fenêtre
glissante, est d'au minimum six récurrences .Le Tableau 1.5
résume le calcul pour une détection avec fenêtre
glissante.
Tableau 1.5 : Probabilité de détection d'au moins
six réponses
Dans le cas du MONOPULSE la longueur de la fenêtre
glissante requise diminue (deux), grâce à l'information d'azimut
de chaque impulsion réponse (Tableau 1.6).
Tableau 1.6 : Probabilité de détection d'au moins
deux réponses

| 

