Dédicaces
Le présent travail est dédié
à:
- mon feu papa M. Donfack Bernard,
- ma maman Mme Donfack Marceline.
Remerciements
Je tiens tout d'abord à remercier la
société ORANGE Cameroun et le département
déploiement et patrimoine de m'avoir accueilli durant ces quatre mois et
de m'avoir donné l'opportunité, à travers mon stage, de
découvrir plus profondément le métier d'ingénieur
à travers des visites de sites très
intéressantes.
Ma vive gratitude aux Dr. AMBA Jean Chills et Dr
MOUSSA Sali, qui ont encadré ce travail académiquement, avec
beaucoup d'engagement.
Je remercie M. Joseph Alain Mailli, Chef de
Département déploiement et patrimoine de ORANGE CAMEROUN, M.
Jocelle TOUKA TCHANA, Chef Service déploiement Littoral/Ouest et Mme
Roukia ABAKAKA administrateur du département pour tous les efforts
qu'ils ont fourni pour me permettre de travailler dans de bonnes conditions.
J'ai beaucoup apprécié leur compagnie et j'espère que
notre amitié durera longtemps.
Je remercie tout particulièrement mon encadreur
professionnel M. Christian MBOCKO, de m'avoir guidé et conseillé
tout au long de ce stage.
Je remercie le chef de département de
technologie de construction industrielle de la FGI M. NYATTE NYATTE JEAN de
m'avoir conseillé depuis mon entrée à la FGI en
2008.
Je remercie tous mes frères et soeurs (JEAN
PIERRE, EMMANUEL, MATHIAS, MAURICE, LUCIENNE, JONAS ET OLIVIER) et mon tuteur
MAHONDE Achile pour leurs soutiens inconditionnels.
Mes remerciements vont à l'endroit de ceux qui
ont participé à la réussite de mon parcours scolaire; il
s'agit de ma famille, mes enseignants, mes amis et mes camarades de
classe.
Je remercie les personnes avec lesquelles j'ai
travaillées au quotidien : l'ingénieur Bernard BASSEMEL, les
techniciens René ESSIGA et Hugues NGOUEN. Je suis très
reconnaissant du temps qu'ils m'ont consacré car ils ont ainsi enrichi
mon apprentissage pendant ce stage.
Résumé :
Les pylones font partie des structures qu'on peut qualifier de
structures discrètes en forme de barres ou poutres. La technique de
calcul de ces structures a connu ces dernières années un
développement considérable. La méthode des
éléments finis est de nos fours un outil puissant permettant de
modéliser ces systèmes, et ce a des co~ts raisonnables ; avec en
prime un temps de calcul réduit .Dans cette optique, une application a
été développée avec pour obfectif le calcul des
déplacements et des rotations en tête du pylone, les contraintes
et les forces axiales dans les barres ainsi que les réactions a la base
du pylone. Les obfectifs visés sont les suivants :
- permettre a tout le personnel du département «
déploiement et patrimoine » de ORANGE CAMEROUN qu'ils soient
ingénieurs ou non de rapidement vérifier si un pylone de hauteur
donnée peut être implanté dans une région
donnée.
- Améliorer la qualité de service dans le
territoire camerounais.
Pour cela, une interface graphique a été
intégrée a l'application et l'ensemble a été
programmé sur « MATLAB 2007b ».
Un exemple de vérification a été fait
pour un pylone de 36 mètres par la méthode analytique et sur
Robot millénium 2010. Les résultats obtenus sont en
adéquation avec les calculs analytiques effectués au moyen de la
méthode des forces, ceci avec une erreur inférieure a 1%.
Les même observations ont été faites pour ce
qui est de la confrontation des résultats analytiques avec ceux du
progiciel « ROBOT MILLENIUM ».
Abstract
Pylons are part of structures which we can qualify as discreet
structures in the form of bars or beams. The technical of calculation of these
structures had a considerable development these last years. The method of
finite elements analysis is nowadays a powerful tool alowing
to model these systems, and in it reasonable costs; with a reduces time in
calculation .In this optics, an application was developed with objective, the
calculation of the displacements and the rotations movement sat the head of the
pylon, the stress and the axial force in the bars as well as the reactions to
the base of the pylon. The targeted objectives are the following:
|
-
|
To allow all the staff of the department "deploiement et
patrimoine "of ORANGE CAMEROON
|
whether engineers or not to quickly verify if a pylon of given
height can be implanted in a given region. - Improve the quality of service in
the Cameroonian territory.
For that purpose, a graphical interface was integrated into the
application and the whole set was programmed on "MATLAB 2007b ".
A verification example was made for a 36 meter pylon by the
analytical method and on Robot millennium 2010. The results obtained are in
adequacy with the analytical calculations made by means of the method of the
forces, this with an error lower than 1 %.
The same observations were made as for the confrontation of the
analytical results with those of the software package "ROBOT MILLENNIUM ".
|
A
|
aire de la section transversale
|
|
Ct
|
coefficient de trainée
|
|
Cr
|
coefficient de réduction des pressions
|
|
E
|
module de Young
|
|
F
|
force en général
|
|
fy
|
limite élastique du matériau
|
|
iv
|
rayon de giration
|
|
Km
|
effet de masque
|
|
Ks
|
coefficient de site
|
|
Lcr
|
longueur de flambement dans le plan
considéré
|
|
L
|
longueur de l'élément
|
|
Nb,Rd
|
valeur de calcul de la résistance au
flambement
|
|
NRd
|
valeur de calcul de la résistance à
l'effort normal
|
|
N
|
effort normal
|
|
N Ed
|
valeur de calcul de l'effort de traction
|
|
Q
|
Actions variables
|
|
Qk
|
Valeurs caractéristiques des actions
variables
|
|
qH
|
pression du vent corrigée
|
|
Si
|
surface totale d'un tronçon, les vides
étant obturés
|
|
Sp
|
surface pleine d'un tronçon
|
|
T
|
action d'ensemble sur un tronçon
|
|
a
|
facteur d'imperfection
|
|
~
|
effet de dimension
|
|
~~
|
Élancement réduit dû au
flambement
|
|
ë1
|
valeur d'élancement pour déterminer
l'élancement réduit
|
|
~
|
facteur de distribution
|
|
ãÌ0,ãÌ1:
|
coefficients partiels de sécurité de
résistance
|
|
A
|
section de l'élément
|
|
B
|
matrice reliant les déformations de
l'élément à ses déplacements nodaux
|
|
Ce
|
matrice de localisation de l'élément
e
|
|
cx, cy
|
cosinus directeur suivant x et y
|
|
D
|
matrice d'élasticité
|
|
E
|
module de Young du matériau
|
|
~~~~~~
|
Vecteur des forces extérieures exprimé dans
le repère local
|
|
Fe
|
vecteur des forces extérieures de
l'élément e exprimé dans le
repère global
|
|
F
|
vecteur des forces aux noeuds de la structure
|
|
f xi
|
composante du vecteur de forces au noeud i suivant l'axe
local ~~
|
|
f yi
|
composante du vecteur de forces au noeud i suivant l'axe
local ji~
|
|
G
|
module de cisaillement du matériau
|
|
It
|
moment d'inertie de torsion
|
|
~~~~~~
|
matrice de rigidité de l'élément
e exprimée dans le repère
local
|
|
Ke
|
matrice de rigidité de l'élément
e exprimée dans le repère
global
|
|
K
|
matrice de rigidité de la structure
|
|
L
|
longueur de l'élément
|
|
~~ e
|
matrice de masse de l'élément
e exprimée dans le repère
local
|
|
Me
|
matrice de masse de l'élément
e exprimée dans le repère
global
|
|
M
|
matrice de masse de la structure
|
|
N
|
matrice d'interpolation reliant les déplacements
d'un point intérieur de l'élément aux déplacements
nodaux
|
|
q
|
charge répartie sur
l'élément
|
|
R
|
réactions inconnues engendrées par les
appuis
|
|
T
|
matrice de transformation du repère local au
repère global
|
|
~~e
|
vecteur de déplacements aux noeuds de
l'élément e exprimé dans le
repère local
|
|
Ue
|
vecteur de déplacements aux noeuds de
l'élément e exprimé dans le
repère global
|
|
U
|
vecteur de déplacements nodaux de la
structure
|
|
uxi
|
composante du vecteur de déplacements au noeud i
suivant l'axe local ~~
|
|
u yi
|
composante du vecteur de déplacements au noeud i
suivant l'axe local jii
|
|
~~
|
dérivée seconde du vecteur de
déplacements nodaux de la structure
|
|
ue (x,y)
|
déplacements à l'intérieur de
l'élément e exprimés en fonction
de x et y
|
|
u (x)
|
déplacement le long de l'axe x
|
|
~
|
déformation de l'élément
|
|
p
|
masse volumique du matériau constituant
l'élément
|
|
a:
|
contrainte dans la barre
|
|
wi
|
pulsation propre correspondant au mode propre
élastique de rang i
|
|
w
|
pulsation
|
|
pi
|
déphasage correspondant au mode propre
élastique de rang i
|
|
H:
|
énergie potentielle totale de la
structure
|
|
He
|
énergie potentielle de l'élément
e
|
Sigles et abréviations
ART : agence de régulation des
télécommunications AUTO STABLE (pylône)
Mât autoportant
AZIMUT
L'azimut est la direction principale d'émission
d'une antenne. Il est exprimé en degrés et est compté
positivement dans le sens horaire, en partant du nord (azimut
0°).
BTS : Base Transceiver Station - Station de base
émettrice-réceptrice
La BTS est le premier élément
électronique « vu » par le téléphone, elle se
trouve près des antennes, dans une baie métallique. La BTS est
constituée de nombreuses cartes électroniques qui organisent la
liaison entre le téléphone et le réseau GSM.
CHARGE EN TETE : Somme des surfaces au vent de toutes les
antennes placées sur le pylône. DEPOINTAGE : Angle de rotation
maximale que peut subir l'entête du pylône
FH : Faisceau Hertzien
Un FH est une liaison hertzienne assurée par deux
antennes en visibilité directe et à très faible diagramme
d'ouverture, ce mode de transmission est très souvent utilisé
pour la liaison Abis.
GSM : Global System for Mobile communications -
Système global de communications mobiles
Le GSM est une norme dont le contenu dépasse 10
000 pages et qui a débuté en 1979. Le développement de la
première phase de cette norme s'est terminé en 1990, alors que
les premiers réseaux ouvraient en Europe. Cette norme de
télécommunications mobiles de 2ème
génération, choisit la transmission numérique avec
multiplexage temporel (TDMA).
M.E .F : méthode des éléments
finis
MS : Mobile Station - Station mobile,
téléphone portable
Téléphone mobile dans un réseau de
téléphonie mobile GSM. NSS : Network Sub-System -
Sous-système réseau
OCM : Orange Cameroun Mobiles
FIGURE 1-1 : ORGANISATION DE L'ENTREPRISE
...........................................................................................
4
FIGURE 1-2 : SITE DE TELECOMMUNICATION
.................................................................................................
9
FIGURE 1-3 : ANTENNE GSM 10
FIGURE1-4 : ANTENNE FH 10
FIGURE 1-5 : VUE D'ENSEMBLE D'UN PYLONE HAUBANE 12
FIGURE 2-1 : PYLONE AUTO STABLE DE 54 M: VUE EN ELEVATION ET
AERIENS 16
FIGURE2-2 AERIENS 17
FIGURE 2-3 : DESCRIPTION D'UN TRONÇON 18
FIGURE 2-4 : TYPE DE TRONÇONS A UTILISER 19
FIGURE 2-5 : ALGORITHME DE CALCUL DU COEFFICIENT DE REDUCTION
........... 30
FIGURE 2-6 : ALGORITHME DE DIMENSIONNEMENT AU FLAMBAGE
........................ 32
FIGURE 3-1 : DISCRETISATION EN ELEMENTS FINIS D'UN TREILLIS PLAN
34
FIGURE 3-2 : GEOMETRIE D'UN ELEMENT BARRE 38
FIGURE 3-3 : MODELISATION D'UN ELEMENT BARRE 38
FIGURE 3-4 : ELEMENT BARRE DANS LE PLAN (I ,X,Y) 39
FIGURE 3-5 : ELEMENT DANS LE REPERE GLOBAL 42
FIGURE 3-6 : FORCE REPARTIE SUR UNE BARRE 43
FIGURE 3-7 : FORCE REPARTIE SUR LES MEMBRURES 43
FIGURE 3-8 : FORCE REPARTIE SUR LES BARRES 43
FIGURE 3-11 : ELEMENT POUTRE EN TORSION 44
FIGURE3-9 : FORCE NODALE 44
FIGURE 3-10 : FORCE NODALE 44
FIGURE 3-12 : ORGANIGRAMME D'ANALYSE LINEAIRE PAR LA M.E.F. D'UNE
STRUCTURE A DE
POUTRES 50
FIGURE 3-13 : ETAPES DE REALISATION DE L'INTERFACE 54
FIGURE3-14 : OUTIL GUIDE 55
FIGURE 4-1 : INTERFACE DE L'APPLICATION 57
FIGURE 4-2 : MAILLAGE DU PYLONE 58
FIGURE 4-3 : PYLONE DEFORME A L'ECHELLE 10 59
FIGURE 4-4 : CHOIX DE LA REGION ET ANTENNES 59
FIGURE 4-5 : LISTING DES CORNIERES 60
FIGURE 4-6 : AFFICHAGE DES RESULTATS 61
FIGURE 4-7 : DEPLACEMENT EN TETE DU PYLONE 61
FIGURE 4-8 : AFFICHAGE PERIODES PROPRES 62
FIGURE 4-9 : RESULTAT DIMENSIONNEMENT 62
FIGURE 4-10 REACTIONS AU NIVEAU DE LA BASE DU PYLONE 63
TABLEAU 1-1 : IDENTIFICATION D'OCM
.............................................................................................................
4
TABLEAU 1-2 : PRESENCE D'ORANGE EN AFRIQUE
.....................................................................................
5
TABLEAU 1-3 : COUT DE REALISATION D'UN SITE
.........................................................................................
8
TABLEAU 2-1 : COMBINAISONS DES TYPES DE TRONÇONS 19
TABLEAU 2-2 : HAUTEUR DES TRONÇONS 19
TABLEAU 2-3 : COMBINAISONS D'ACTIONS A L'ELS 23
TABLEAU 2-4 : COMBINAISONS D'ACTIONS A L'ELS 23
TABLEAU 2-5 : PRINCIPALES ZONES CLIMATIQUES AU CAMEROUN 24
TABLEAU 2-6 : TYPE DE SITE 25
TABLEAU 2-7 : CALCUL DE LA CHARGE EN TETE D'UN PYLONE 27
TABLEAU 4-1 : RESULTATS DES REACTIONS 66
TABLEAU 4-2 : RESULTAT DU CALCUL DES CONTRAINTES 67
TABLEAU 4-3 : RESULTAT DU CALCUL DES CONTRAINTES (SUITE)
......................... 68
TABLEAU 4-4 : RESULTAT DU CALCUL DES CONTRAINTES (SUITE)
......................... 69
TABLEAU 4-5 : RESULTAT DU CALCUL DES CONTRAINTES (SUITE) 70
TABLEAU 4-6 : RESULTAT DU CALCUL DES CONTRAINTES (SUITE)
......................... 71
TABLEAU 4-7 : RESULTAT DU CALCUL DES CONTRAINTES (SUITE)
........................ 72
TABLEAU 4-8 : RESULTAT DU CALCUL DES CONTRAINTES (FIN)
.............................. 73
TABLEAU 4-9: RESULTAT DU CALCUL DES DEPLACEMENTS 73
TABLEAU 4-10 : COMPARAISON DES RESULTATS 73
Sommaire pages
Dédicaces i
Remerciements ii
Résumé ...iii
Abstract . .iv
Notations . v
Sigles et abréviations ...vi i i
Liste des figures . x
Liste des tableaux . xii
Sommaire xii
Introduction générale ..1
chapitre-1 : Présentation générale
de l'entreprise (*) 3
1-1 Historique et naissance 3
1-2 Missions 3
1-3 Actionnariat 3
1-4 Organisation de l'entreprise 4
1-5 Identification 4
1-6 Quelques activités du département
déploiement et patrimoine 5
1-7 Présence de Orange en Afrique 5
1-8 Étapes de construction du site 5
1-8-1 Commande de l'opérateur 5
1-8-2 Contenu de l'étude 6
1-9 Réalisation 7
1-9-1 Gros oeuvre 7
1-9-2 Installation et test du matériel
8
1-9-3 Mise en route 8
1-9-4 Coût 8
1-10 Les difficultés et solutions proposés
9
1-11 Site de télécommunication
9
1-11-1 Le relais 9
1-11-2 Le pylône 11
1-12 Restriction de l'étude 13
1-12-1 Type de pylônes à traiter
13
1-12-2 Modèle 14
1-13 Conclusion 14
chapitre-2 Différentes normes de construction des
pylônes 15
2-1 Introduction 15
2-2 Prise de connaissance des pylônes à
étudier 16
2-3 L'Eurocode 3 20
2-3-1 Introduction 20
2-3-2 Définition des états limites
20
2-3-3 Représentation des actions 21
2-3-4 Combinaisons d'actions 22
2-4 Charges appliquées au pylône
23
2-4-1 Combinaisons des actions 23
2-5 Les normes du vent 24
2-5-1 La zone où se situe la construction :
24
2-5-2 La hauteur de la construction 24
2-5-3 Le site où se situe la construction : ks
25
2-5-4 L'effet de dimension: ö
25
2-5-5 L'effet de masque: km 25
2-5-6 De la forme de la construction : Ce - Ci
25
2-5-7 Des actions dynamiques: 3
25
2-6 Détermination de la pression de calcul du vent
26
2-7 Action d'ensemble sur le pylône 26
2-8 Dimensionnement 28
2-8-1 L'analyse globale du premier ordre 28
2-8-2 Vérification de la résistance des
sections transversales de classe 3. 29
2-8-3 Algorithmes de vérifications 31
2-9 Conclusion 32
chapitre-3 Formulation des éléments finis
33
3-1 Introduction 33
3-2 Concept de base de la méthode des
éléments finis 34
3-2-1 La formulation élémentaire au niveau
de l'élément fini 35
3-2-2 La formulation globale au niveau de la structure
complète 35
3-3 Démarche de formulation éléments
finis 35
3-3-1 Discrétisation de la structure en
éléments finis 35
3-3-2 Construction de l'approximation nodale par sous
domaine 36
3-3-3 Etablissement de la relation entre
déformations et déplacements 36
3-3-4 Etablissement de la relation entre contraintes et
déformations 36
3-3-5 Calcul des matrices élémentaires.
36
3-3-6 Assemblage des matrices élémentaires
37
3-4 Elément fini barre 37
3-4-1 Définition 37
3-4-2 Formulation de l'élément barre dans
le plan 39
3-5 Formulation d'un élément poutre en
torsion 44
3-5-1 La matrice de rigidité 44
3-6 Résolution en analyse statique 45
3-6-1 Systèmes d'équations linéaires
45
3-6-2 Prise en compte des conditions de
déplacement imposé 45
3-6-3 Résolution du système linéaire
46
3-6-4 Calcul des efforts 47
3-7 Résolution en analyse modale 48
3-7-1 Système d'équations aux valeurs
propres 48
3-7-2 Résolution du système aux valeurs
propres 49
3-8 Algorithmes de résolution 49
3-8-1 Lecture des données 50
3-8-2 Traitement des données 51
3-8-3 Calcul de la solution 52
3-9 Création de l'interface graphique
53
3-9-1 Etapes de conception 54
3-9-2 Outil guide 54
3-9-3 Programmation du guide 55
3-10 Conclusion 56
chapitre-4 Application à un pylône de 36
mètres 57
4-1 Introduction 57
4-2 Affichage (maillage) du pylône 58
4-3 Choix de la région et de l'antenne
59
4-4 Choix des cornières 60
4-5 Affichage des résultats 61
4-6 Périodes propres du pylône : zone de
texte 62
4-7 Vérification du dimensionnement 62
4-8 Réactions à la base du pylone
63
4-9 Confrontation avec la méthode analytique
63
4-9-1 Principe de la méthode analytique
63
4-9-2 Calcul des erreurs moyennes 65
4-9-3 Conclusion 73
Conclusion générale
75
Bibliographie
Annexes
Les pylônes font partie de ces structures que
l'on qualifie de structures discrètes à cause de leur composition
en éléments barres ou poutres assemblées par soudures ou
rivetage en des points appelés <<noeuds>>, et soumises
à des forces extérieures. Le calcul analytique de ces structures
est fastidieux, voir impossible à cause du nombre élevé de
barres et de leurs connectivités. La méthode des
éléments finis est apparue avec la nécessité de
résoudre ces problèmes de calcul complexes dans un contexte
où le développement massif de l'informatique permettait
d'automatiser le traitement de gros systèmes d'équations. Presque
tous les logiciels de calcul des structures (ROBOT MILLENIUM, SAP 2000 etc.)
utilisent la méthode des éléments finis pour
déterminer les contraintes, les déplacements dans les structures,
etc.
Ces logiciels ne sont pas d'une manipulation
aisée, ils exigent une bonne formation pouvant aller jusqu'à un
an ; ne peut les utiliser efficacement que celui qui a une maitrise dans le
domaine du calcul des structures. Ces logiciels ne sont pas destinés
à une structure particulière puisque, selon le type de structure
que l'on veut concevoir, il faut adapter la méthode de calcul ainsi que
le logiciel appropriés. Tous les calculs se font de façon
automatique, en conséquence, une petite erreur de la part du
manipulateur peut conduire à des résultats aberrants, surtout si
celui-ci n'est pas un utilisateur confirmé. Parfois ces logiciels sont
dotés d'un nombre de fonctionnalités très
impressionnantes, pas toujours très utiles, parfois redondantes, qui
peuvent éventuellement davantage égarer
l'utilisateur.
Pour cela, la nécessité de
développer des programmes de calcul beaucoup plus simples et
adaptés pour certaines applications spécifiques permet
d'atteindre les résultats escomptés tout en nécessitant
les temps d'adaptation et de formation relativement courts pour les
utilisateurs.
L'objectif de ce travail est de concevoir un code, de
calcul statique et modal par la méthode des éléments finis
pour des pylônes. Ce code programmé en matlab version 2007b, sera
baptisé << GENIE >> et permettra de faire une estimation des
contraintes dans toutes les barres et de mettre en évidence, le
déplacement et la rotation en tête du pylône selon la norme
européenne
Eurocode 3. Le calcul sera effectué suivant une
analyse globale du premier ordre qui permet de déterminer la
distribution des sollicitations à l'intérieur des
différents composants de la structure. Il est à noter que
l'architecture de << GENIE >> offre la possibilité d'ajout
de nouveaux modules pour d'autres types d'application.
Sans disposer de toutes les fonctionnalités
disponibles dans les logiciels commerciaux (analyse élasto-plastique,
temporelle etc.), GENIE se veut tout de même une alternative
crédible à ces logiciels pour la conception des pylônes. En
effet, dans de nombreux cas, un nombre limité de fonctionnalités
est nécessaire. Pour cette raison, la programmation de << GENIE
>> s'est apaisantie sur ces fonctionnalités de base, en veillant
à ce que l'interface utilisateur soit la plus claire
possible.
Ce travail est développé en quatre
chapitres.
Dans le chapitre 1, est faite une présentation
générale l'entreprise. Il est question ici de donner tous les
renseignements inhérents à l'entreprise ; nous allons faire un
état de lieu du département ou s'est déroulé le
stage.
Dans le chapitre 2, nous présentons toutes les
normes relatives à la construction des pylônes à savoir :
les normes Eurocodes et les normes NV 65.
Dans le chapitre 3, les formulations
éléments finis utilisées dans l'application GENIE pour
modéliser des pylônes sont présentées. Les
modèles, les théorèmes, les équations, les formules
théoriques ainsi que les algorithmes sont
présentés.
Dans le chapitre 4, une présentation des
résultats et de l'interface graphique développée est
faite. Un exemple de calculs statique et modal est traité en vue de
calculer les contraintes et les déplacements sur le
pylône.
1-1 Historique et naissance
ORANGE fut lancé sur le marché
britannique en avril 1994 par Hutchison Whampoa groupe originaire de Hong Kong,
avec pour objectif de devenir l'opérateur de référence en
matière de communications mobiles. C'est alors le quatrième
opérateur sur ce marché déjà très
saturé. Pour atteindre son objectif, ORANGE doit donc se
démarquer radicalement. Les trois acteurs déjà
présents sur ce marché pratiquaient à l'époque une
tarification complexe et élevée. Pour les contrer, ORANGE se
forge une identité forte et innove en proposant des forfaits simples,
moins chers et avec des services supplémentaires. ORANGE est
lancée à Hong Kong en septembre 1998, et passe de la
quatrième à la première place du marché. En 1999,
ORANGE prend pied en Afrique et donc au Cameroun avec la libéralisation
du secteur de la télécommunication avec pour appellation
société camerounaise des mobiles « mobilis » et c'est
depuis juin 2002 que mobilis est devenu ORANGE CAMEROUN MOBILE. Il est
présent sur beaucoup de pays africains et occupe le deuxième rang
au Cameroun derrière MTN. [12]
1-2 Missions
OCM est une société privée dont
l'objectif est de fournir Les services de communication mobile et
d'accès au réseau internet sur le plan national et international.
Tout ceci avec des interfaces assurant une qualité de service
optimale
1-3 Actionnariat
- OCM : 69.8% ;
- Société de droit Camerounais: 29.5%
;
- Personnes physiques représentant les
intérêts du groupe: 0.7%.
(*) Informations de 2009 non encore mises à
jour.
Chapitre 1 : présentation
générale de l'entreprise
1-4 Organisation de l'entreprise

service Design et
planification
des
infrasr uct ures
département
Ingénierie
système
département
déploiement
patrimoine
Service
centre/ nord
responsable
infrastructure
littoral
technicien site
littoral
Département
radio
Service
littoral/o uest
responsable
infrastructure
o uest
technicien site
o uest
q ualité et
méthodes
Administrateur

Direction des
ventes
Direction d
u
système
d'information
Direction des
resso urces
h umaines
Direction d u
développement
résea u
Direction
technique et
informatiq ue
direction
générale
Direction des
opérations de
maintenance
Direction de
controle de
gestion
direction d u
service client
Figure 1-1 : organisation de l'entreprise
1-5 Identification
Tableau 1-1 : identification d'OCM
|
Raison sociale
|
ORANGE CAMEROUN MOBILE
|
|
Statut juridique
|
société anonyme (SA)
|
|
Date de création (mobilis)
|
28 mai 1999
|
|
Date de mise en service du
réseau
|
février 2000
|
|
Dénomination OCM
|
04 juin 2002
|
|
Siege social
|
rue franqueville BP. 1864 douala -Cameroun
|
|
Capital social
|
15 010 000 000 francs cfa
|
|
Directeur général
|
Jean BARDET
|
|
Logos
|
|
1-6 Quelques activités du département
déploiement et patrimoine
Le département déploiement et patrimoine
est celui qui s'occupe de la négociation, du suivi de la construction et
de la maintenance des sites de téléphonie. Il supervise les
travaux des soustraitants, parmi ces travaux, nous pouvons citer :
- La négociation des sites, -
La construction des sites,
- L'électrification des sites,
- La remise à niveau des sites, -
La bibandisation.
1-7 Présence de Orange en Afrique
Tableau 1-2 : présence d'orange en Afrique
|
pays
|
opérateur
|
Nombre de
clients (millions)
|
Part de
marché (%)
|
rang
|
|
Cameroun
|
Orange
|
2,137
|
42
|
2è
|
|
Cote d'ivoire
|
Orange
|
4
|
42.5
|
1er
|
|
Egypte
|
mobinil
|
20
|
51.9
|
1er
|
|
Madagascar
|
Orange
|
3.8
|
63.2
|
1er
|
|
Guinée équatoriale
|
Orange guinée
équatoriale
|
<<< 1
|
|
|
|
Ile Maurice
|
Orange
|
0.552
|
59
|
1er
|
|
Kenya
|
Orange Kenya
|
0.6
|
5
|
3ème
|
|
Ouganda
|
Orange Ouganda
|
<<< 1
|
/
|
/
|
|
Tunisie
|
Orange Tunisie
|
0.676
|
8
|
3ème
|
|
mali
|
orange
|
2
|
80
|
1er
|
1-8 Étapes de construction du site
1-8-1 Commande de l'opérateur
Pour des raisons commerciales ou par imposition de
l'agence de régulation des télécommunications (ART),
Orange définit de nouvelles zones à équiper, pour cela, il
commande à un sous-traitant spécialisé (CAMUSAT, CARTEL,
SAGEMCOM ...) la réalisation d'une étude pour de nouveaux
emplacements de relais. L'opérateur définit une zone de quelques
kilomètres en zone rurale ou de quelques centaines de mètres en
ville où devra se trouver le
relais, il définit aussi les besoins de
couverture, la capacité en trafic, les fréquences
utilisées (900, 1800, 1900- 2200 MHz).
1-8-2 Contenu de l'étude
1-8-2-1 Recherche des emplacements
Le sous-traitant cherche des emplacements pour le site,
qui seront classés par ordre de priorité par
l'opérateur.
1-8-2-2 Début de la négociation
(survey)
Quand des emplacements ont été
trouvés, le sous-traitant s'occupe de la négociation avec le
propriétaire. C'est cette phase la plus délicate, puisque les
propriétaires sont très réticents pour accueillir des
antennes. Cette négociation dure tout au long de l'étude, et
après la visite technique qui définit la position des baies et
des antennes, une proposition est faite au propriétaire. Si la
négociation s'est bien déroulée, le montant de la location
(qui peut aller d'une centaine à un million de francs par mois)
payé par l'opérateur est fixé et un accord de principe est
signé.
1-8-2-3 Visite technique (draft)
Les services d'Orange font une visite technique sur
place, pour définir le type d'antenne et leurs positions. Le
sous-traitant fait lui aussi des relevés pour prévoir
l'installation du matériel et des chemins de câbles.
1-8-2-4 Dossier technique (avant projet
détaillé)
L'opérateur donne les spécifications
générales du site au sous-traitant, qui va établir un
dossier technique minimal contenant les plans, descriptifs des travaux,
position sur le cadastre. Une fois le dossier retourné à
l'opérateur, celui-ci va le compléter en faisant des simulations
pour choisir définitivement le type d'antennes, leur orientation, azimut
etc.
1-8-2-5 Démarches administratives
Le sous-traitant prend connaissance du dossier complet
et accomplit les démarches nécessaires. Il fait les demandes
administratives pour la réalisation des travaux (permis de construire,
demande de travaux). Si l'un des ces agréments n'est pas donné,
le site doit être abandonné ou modifié de manière
à devenir conforme et ainsi obtenir les autorisations
nécessaires.
1-8-2-6 Dossier technique complet
Une fois toutes les autorisations obtenues, un dossier
technique définitif est renvoyé à l'opérateur qui
vérifie que tout corresponde bien aux spécifications techniques
initiales. Les travaux devront suivre scrupuleusement ce dossier.
1-8-2-7 Décision finale
L'opérateur étudie le dossier et
vérifie que la négociation effectuée avec le
propriétaire (prix d'achat, location) est convenable. Si tout est bon,
l'accord de financement est donné, l'opérateur et le
propriétaire concluent la négociation (signature du bail, acte de
vente) et les travaux peuvent débuter.
1-9 Réalisation
Le sous-traitant choisi par Orange organise les
travaux, il les réalise entièrement ou peut en sous-traiter une
partie à des entreprises spécialisées dans les gros
oeuvres, l'installation du pylône, etc.
1-9-1 Gros oeuvre
Cette étape doit permettre l'accès au
site en question. S'il s'agit d'une région difficile d'accès, il
faudra au préalable mettre en place un chemin praticable par les engins
nécessaires à l'installation du pylône et autres
matériels. Si le site se trouve sur un toit d'immeuble, il faudra
sécuriser les abords du toit et préparer à accueillir les
antennes et les BTS. C'est à ce moment-là que seront faites les
fondations en ciment destinées à supporter le pylône et les
baies.
1-9-2 Installation et test du matériel
Le sous-traitant installe les antennes dans les
azimuts et inclinaisons définis, met en place les câbles et
prépare la structure pour accueillir les baies ; il s'occupe aussi de la
sécurité du site, pour protéger les personnes qui seront
amenées à y travailler (garde-fous, rampe d'accès,
échelle d'accessibilité.
Un technicien de l'entreprise qui fournit les BTS se
rend sur place, pour terminer l'installation des baies. Il achève les
derniers branchements : alimentation électrique, connexion des antennes
et procède aux premiers essais en collaboration avec une personne du
centre de supervision de l'opérateur, pour vérifier le bon
fonctionnement et la bonne configuration de la BTS et des antennes, secteur par
secteur.
Orange organise une visite qui lui permet de
vérifier la conformité du site aux spécifications du
dossier technique. Si le site est conforme, le sous-traitant est payé.
[13]
1-9-3 Mise en route
Le site ouvre en exploitation, il est surveillé
par le service optimisation de l'opérateur qui procède à
des réajustements notamment au niveau de la puissance, pendant les
premiers mois de fonctionnement. Des interventions peuvent avoir lieu sur le
site pour affiner les réglages.
1-9-4 Coût
Tableau 1-3 : Gout de réalisation d'un site
|
Ouverture de chemins d'accès, clôture du
site, terrassement, construction des locaux techniques, tableau
électrique
|
15
|
000 000 FCFA
|
|
Pylône et installation
|
24
|
000 000 FCFA
|
|
Antennes GSM, antenne HH et câbles
coaxiaux
|
10
|
000 000 FCFA
|
|
Installation et configuration d'une baie avec 1 TRX par
secteur.
|
50
|
000 000 FCFA
|
|
Total
|
99
|
000 000 FCFA
|
Il est à noter que les coûts de
réalisation varient suivant la nature du site : pylône existant,
terrain difficilement accessible, capacité du site, nombre d'antennes.
Lors de la location de terrain, le loyer mensuel varie d'une centaine à
un million de francs, suivant l'emplacement. Ici, nous donnons une valeur
approximative de ce coût.
1-10 Les difficultés et solutions
proposés
Il est donc difficile pour un personnel de ORANGE de
donner les spécificités mécaniques quant au pylône
qui sera mis sur pied car peu de personnels sont du domaine du génie
civil ou du génie mécanique. La communication peut paraitre
difficile entre l'employé de l'opérateur et le sous traitant.
Nous nous proposons de mettre sur pied un outil de vérification des
pylônes, facile d'utilisation et accessible à tout le personnel
quelque soit son domaine de compétence et son niveau
hiérarchique.
1-11 Site de télécommunication
Un site de télécommunication est
globalement composé de deux éléments majeurs : le relais
et le pylône.

Figure 1-2 : site de télécommunication
1-11-1 Le relais
Le relais sert d'intermédiaire entre le
téléphone mobile (MS) et le sous système réseau qui
regroupe l'ensemble des éléments de gestion des mobiles et
d'acheminement des
communications. Nous allons voir dans cette partie les
caractéristiques principales d'un relais GSM, ainsi que sa composition,
d'une manière assez simplifiée. [13]
1-11-1-1 Les antennes
Les antennes sont les composantes les plus visibles du
réseau. On les voit un peu partout, souvent sur des hauts pylônes,
sur des toits d'immeubles, contre des murs, à l'intérieur des
bâtiments. Il arrive assez souvent qu'elles soient invisibles puisque
camouflées, pour des raisons esthétiques, à
proximité de bâtiment. Nous donnons ici quelques
caractéristiques des antennes.

Figure 1-4 : antenne FH Figure 1-3 : antenne GSM
a. Fréquence d'utilisation
La caractéristique la plus importante d'une
antenne, aussi appelée aérien, est la bande de fréquences
supportée ; c'est-à-dire les fréquences que l'antenne
pourra émettre et recevoir. Sur les sites GSM, on trouve des antennes
qui émettent seulement en 900 MHz, seulement en 1800 MHz ou des antennes
bi-bandes 900 et 1800 MHz.
b. Directivité
La deuxième caractéristique importante est
la directivité sur le plan horizontal, c'est en fait la ou les
direction(s) dans laquelle l'antenne va émettre.
c. Azimut
Chaque antenne est dirigée dans une direction
déterminée par des simulations, de manière à
couvrir exactement la zone définie (annexe 1.a). La direction principale
de propagation de l'antenne, c'est-à-dire la direction dans laquelle
l'antenne émet à sa puissance la plus importante est
dirigée dans l'azimut établi. L'azimut est un angle qui se compte
en degrés, positivement dans le sens horaire, en partant du nord
(0°). De cette façon, l'azimut 90° correspond à l'est,
l'azimut 180° au sud, etc.
1-11-1-2 La BTS
La BTS est le premier élément
électronique actif du réseau GSM, vu par le mobile. C'est
l'élément intermédiaire qui reçoit des
informations, donne des ordres et les exécute. Elle est logée
dans un abri (annexe 1.b).
Elle est constituée de :
a. Baie
La baie est une grande armoire métallique,
parfaitement blindée électriquement, hermétique,
climatisée en saison sèche et chauffée en saison des
pluies pour conserver une température de fonctionnement constante. Une
baie est modulaire, elle contient des emplacements pour des cartes
électroniques qui sont ajoutées suivant les besoins du site
(annexe 1.c).
b. Alimentation
L'alimentation de la baie se fait avec la tension du
réseau alternatif. Ensuite, le transformateur convertit cette tension en
une tension continue pour l'alimentation de tous les éléments de
la BTS, qui peut consommer jusqu'à une trentaine d'ampères en
fonctionnement à plein régime. Des batteries sont
associées à cette alimentation, pour permettre un fonctionnement
de plusieurs heures en cas de coupure de courant.
1-11-2 Le pylône
Le pylône est la structure porteuse à
treillis de section triangulaire ou carrée ayant pour seul rôle de
supporter et de maintenir en équilibre les antennes. Les
spécificités des pylônes sont les suivantes :
[14]
1-11-2-1 Les pylônes haubanés
Conçue pour supporter des charges
légères et moyennes, elles sont stabilisées à
différents niveaux sur sa hauteur par des haubans ancrés au sol.
Ce type de pylône est construit lorsqu'on dispose d'un grand espace ou
alors si le pylône est de grande taille. L'ensemble de pylônes
haubanés se présentent sous forme triangulaire, présentent
une conception haubanée treillis. Les pylônes haubanés sont
conçus pour des hauteurs allant de 20 à 150m. Chaque pylône
est équipé d'une variété d'accessoires comprenant
des plates-formes, des supports d'antennes, des dispositifs de
sécurité, des kits de balisage, un kit de protection contre la
foudre et autres.

Figure 1-5 : vue d'ensemble d'un pylône haubané
1-11-2-2 Les pylônes autostables à quatre
pieds
C'est un pylône autoportant de quatre pieds
constitué d'éléments conçu suivant un modèle
de base carré. Ce pylône est capable de supporter des charges
moyennes et lourdes. Le pylône autostable carré est conçu
pour des hauteurs allant de 20 à 120m. Le pylône angulaire
carré peut être équipé d'une variété
d'accessoires tels que des plates-formes, des supports d'antennes, des
dispositifs de sécurité, des kits de balisage, un kit de
protection contre la foudre et autres. L'ensemble des accessoires de
pylônes de télécommunication peuvent être
installés à une hauteur et une orientation souhaitées
conformément aux exigences du client.
1-11-2-3 Les pylônes autostables à trois
pieds
Ce sont des pylônes autoportants à trois
pieds constitués d'éléments triangulaires conçus
suivant un modèle de base triangulaire. Le pylône de communication
est capable de supporter des charges moyennes et lourdes. Il est conçu
pour des hauteurs allant de 20 à 70m. Tous les pylônes peuvent
être fournis avec une variété d'accessoires tels que des
plates-formes, des supports d'antennes, des dispositifs de
sécurité, des kits de balisage, un kit de protection contre la
foudre et autres. L'ensemble de ces accessoires de pylônes d'antenne
peuvent être installés à une hauteur et une orientation
souhaitées conformément aux exigences du client.

Figure 1-3 : vue d'ensemble d'un pylône auto stable
à quatre pieds
1-12 Restriction de l'étude
1-12-1 Type de pylônes à traiter
Durant toute cette étude, seuls les pylônes
auto stables carrés seront traités, les hauteurs seront les
suivantes : 36 mètres, 54 mètres et 72 mètres.
1-12-2 Modèle
Le pylône est soumis uniquement à
l'action des antennes et du vent, les longueurs des barres sont relativement
courtes. Ces efforts ne sont pas de nature à créer des efforts de
flexions considérables. Par conséquent, les barres du
pylône ne seront sollicitées qu'en traction ou compression. Les
liaisons entre les barres ne sont que des rotules sans frottement constituant
les noeuds. Nous supposerons également que : [1]
- Les forces extérieures sont appliquées
uniquement aux noeuds (pour la force du vent, elle est linéaire et sera
appliquée sur les noeuds correspondants).
- Les poids propres des barres sont négligeables
devant les forces extérieures.
Le modèle de structure que nous adoptons est donc
le treillis plan.
Nous allons nous intéresser à une seule
face, puisque le pylône est symétrique. Les profilés sont
les cornières à ailes égales. La limite
d'élasticité est de 235 Mpa pour toutes les barres sauf les
membrures. La limite d'élasticité des membrures est de 275
Mpa.
Le vent agit dans deux directions principales : l'une
normale à la face qui porte l'antenne et l'autre suivant une diagonale
de la structure.
Les pylônes sont supposés être
construits uniquement sur le territoire camerounais.
1-13 Conclusion
Nous avons l'état des lieux au sein du
département « déploiement et patrimoine » de OCM et
toutes les étapes de construction d'un site de
télécommunication.
chapitre-2 Différentes normes de construction
des
pylônes
2-1 Introduction
Les pylônes que nous nous proposons de calculer
sont constitués totalement des produits laminés. Ces produits
laminés sont constitués des profilés, des tôles etc.
La réalisation de telles structures s'effectue suivant des normes de
conception qui permettent d'obtenir un ouvrage assurant la
sécurité des personnes et des biens et bénéficiant
d'une durabilité cohérente avec l'investissement
consenti.
Dans ce travail, nous nous intéressons au
calcul basé sur les normes NV65 et les normes structurales Eurocodes 3
partie 3-1 applicables aux pylônes et mats haubanés. Ainsi, dans
ce chapitre nous présentons les exigences relatives à la
résistance mécanique des sections transversales et à la
stabilité des éléments de ce type de structures.
L'ensemble de ces exigences est intégré dans le code GENIE en vue
de réaliser un diagnostic faisant suite à une analyse globale qui
permet de déterminer la distribution interne des sollicitations pour les
différents composants du pylône.
Nous nous limiterons aux profils laminés de classe
3. Nous supposerons, aussi, étudier des sections brutes sans trous de
fixation.
2-2 Prise de connaissance des pylônes à
étudier

Figure 2-1 : pylône auto stable de 54 m: vue en
élévation et aériens

Balisage
Figure 2-2 aériens

Figure 2-3 : description d'un tronçon
Les pylônes à étudier sont de type
auto stable carrés destinés à supporter plusieurs types
d'antennes dont la charge en tête est connue. Les faces du pylône
sont des quadrilatères et les sections sont variables ; la partie
inférieure est en tronc de pyramide et la partie supérieure est
parallélépipédique. Il se compose de plusieurs
tronçons variables selon la taille du pylône. Un tronçon
est toute partie d'un pylône subdivisé verticalement dans le but
de déterminer les aires projetées et la traînée
aérodynamique. Les tronçons sont souvent, mais pas
nécessairement, compris entre des intersections de membrures et de
contreventements principaux. Pour l'analyse globale, il convient de s'assurer
que la hauteur du pylône est subdivisée en un nombre suffisant de
sections pour obtenir une modélisation représentative de la
structure. En fonction de la hauteur du pylône, il faut juxtaposer les
tronçons convenables, ainsi les combinaisons de ces tronçons sont
les suivantes :
Les tronçons de base à utiliser sont les
suivants :

Figure 2-4 : type de tronçons à
utiliser
Tableau 2-1 : combinaisons des types de tronçons
|
Hauteur du
pylône
|
|
|
|
Type de tronçons
|
|
|
|
36 mètres
|
|
|
|
4 - 4 - 4
|
- 4
|
- 4
|
- 5
|
- 6
|
|
|
|
54 mètres
|
|
|
2 - 2
|
4 4
|
4
|
4
|
4
|
4 5
|
- 6
|
|
|
72 mètres
|
2
|
|
- 2
-4
|
4 4 4
|
4
|
4
|
4
|
4
|
4 5
|
- 6
|
Les hauteurs de ces tronçons sont les suivantes
:
Tableau 2-2 : hauteur des tronçons
|
Type de troncon
|
1
|
2
|
3
|
4
|
5
|
6
|
|
Hauteur en
mètres
|
3 ou 4
|
6
|
6
|
6
|
2
|
4
|
2-3 L'Eurocode 3
2-3-1 Introduction
Les Eurocodes constituent un ensemble
intégré de normes européennes pour la conception des
structures de bâtiments et ouvrages de Génie Civil. Ils ont une
importance essentielle à la fois pour le secteur de la conception des
ouvrages et pour l'industrie du bâtiment et des Travaux
Publics.
L'objet des Eurocodes est de codifier des
méthodes communes de vérification des structures qui, mises
à la disposition des États, constitueront une
référence technique et commerciale dans le domaine du
génie civil.
L'application des Eurocodes permet de
bénéficier d'une présomption favorable du respect des
prescriptions de sécurité, de stabilité et de
durabilité des constructions en service, ainsi que d'une
sécurité au feu, dans la mesure où ils permettent de
déterminer les performances des structures ou des éléments
structuraux vis-à-vis de toutes ces exigences.
L'Eurocode 3 définit les exigences de
résistance, d'aptitude au service et de durabilité des structures
an acier et est subdivisé en différentes parties :
Les Eurocodes sont publiés par les Organismes
Nationaux de Normalisation et complétés dans chaque pays, par des
Annexes Nationales. L'Annexe Nationale contient des informations relatives
à des paramètres qui sont à déterminer au niveau
national (par exemple, les données climatiques).
2-3-2 Définition des états limites
C'est un état au delà duquel la structure
ne satisfait plus aux critères de dimensionnement pertinent.
Pour un ouvrage, un état limite est un état
au delà duquel une exigence n'est plus satisfaite.
2-3-2-1 États limites ultimes
Chaque état limite ultime est associé
à une ruine ou un effondrement total ou partiel de la structure
considérée qui met en cause la sécurité des
personnes. Sur le plan pratique, les modes de ruine considérés
sont :
- la perte d'équilibre statique de la structure
ou de l'une de ses parties, considérée comme un corps rigide,
couvrant les phénomènes de renversement, de soulèvement et
de glissement avec ou sans frottement ;
- la défaillance par déformation excessive,
par transformation de la structure ou de l'une quelconque de ses parties en
mécanisme, par rupture, par perte de stabilité.
- la défaillance due à la fatigue ou autres
effets dépendant du temps.
2-3-2-2 États limites de service
Les états limites de service sont
associés à des situations de la structure (ou de certaines de ses
parties) rendant l'usage de la structure impossible dans le cadre des exigences
définies lors de son projet (exigences de fonctionnement, de confort
pour les usagers ou d'aspect).
Ces états limites de service comprennent
:
- les déformations affectant
défavorablement l'exploitation de l'ouvrage ou provoquant des dommages
aux finitions ou superstructures (bardage, couverture, etc.) ;
- les vibrations pouvant incommoder les occupants,
endommager le bâtiment ou limiter son efficacité
fonctionnelle.
2-3-3 Représentation des actions
Les actions sont, généralement,
classées en actions permanentes, actions variables et actions
accidentelles [4].
a. Les actions permanentes (notées G) sont des
actions dont la durée d'application est égale à la
durée de vie de la structure ; elles peuvent être constantes ou
connaître de faibles variations au cours du temps.
b. Les actions variables (notées Q) sont des
actions à occurrences discrètes plus ou moins ponctuelles dans le
temps ou à caractères (intensité, direction, etc.)
variables dans le temps et non monotones (neige, vent, température,
houle par exemple).
Les principales valeurs représentatives d'une
action variable qui peuvent intervenir dans les combinaisons d'actions sont
:
- la valeur caractéristique, notée
Qk
- la valeur de combinaison, notée
i0Qk ;
- la valeur fréquente, notée
yr1Qk ;
- la valeur quasi permanente, notée
iir2Qk ;
Les coefficients yr dépendent de
la nature de la charge (exploitation, neige ou vent) et sont fixés dans
l'Eurocode 1.
c. Les actions accidentelles (notées A)
qui sont parfois de courte durée d'application et de caractère
aléatoire (explosions, chocs, incendie par exemple).
La valeur de calcul d'une action est obtenue en faisant
le produit de sa valeur caractéristique par un coefficient partiel de
sécurité, majorant variable selon l'action
considérée
2-3-4 Combinaisons d'actions
Pour les états limites ultimes, les valeurs de
calcul des effets des actions doivent être combinées en appliquant
les règles de combinaisons suivantes [4] :
Situations de projet durables et transitoires
:
E ~YG,j*Gkj +Y Q,1*Qk,1+E i>
1 YQ,i* 1110,i *Qk,i (2-1)
Situations de projet accidentelles :
E ~YGAj*Gkj + Ad +
1111,1*Qk,1+E i> 12,i *thi,i
(2-2)
Où
- Gk, j valeurs caractéristiques des actions
permanentes ;
- Q k,1 valeur caractéristique d'une action
variable jugée prépondérante ; - Q k,i
valeurs caractéristiques des autres actions variables ;
- A d valeur caractéristique de l'action
accidentelle ;
- yG, j coefficient partiel de sécurité
appliqué à l'action permanente G k, j ;
- yGA, j coefficient partiel de sécurité
appliqué à k, j G dans le cas de situations accidentelles
;
- yQ,i coefficient partiel de sécurité
appliqué à l'action variable Q k,i ; -
w0, 1111, w2 coefficients
dépendant de la nature de la charge.
|
Pour les états limites de service, on
définit les expressions suivantes [4] Combinaison rare
E ~ Gk,j +Qk,1+E ~> 10,i
Qk,i
Combinaison fréquente
E ~ Gk,j +1111,1Qk,1+E i>
12,i
Combinaison quasi-permanente
E ~ Gk,j +Ei> 1 1112,i
Qk,i
|
(2-3) (2-4) ( 2-5)
|
2-4 Charges appliquées au pylône
- Cas 1 : poids des antennes,
- Cas 2 : vent normal suivant Dx : le vent agit
normalement à une face,
- Cas 3 : vent normal suivant Dxy : le vent agit
normalement à une diagonale du pylône.
2-4-1 Combinaisons des actions
2-4-1-1 Calcul à l'ELU
Durant ce travail, les combinaisons seront les suivantes
: [11]
Tableau 2-3 : combinaisons d'actions à l'ELS
|
combinaison
|
nom
|
Type d'analyse
|
Nature de la
combinaison
|
définition
|
|
1
|
Comb1
|
Analyse linéaire
|
ELU
|
1.35* « cas1 »+1.50* « cas2
»
|
|
2
|
Comb 2
|
analyse linéaire
|
ELU
|
1.35* « cas1 »+1.50* « cas3
»
|
2-4-1-2 Calcul à l'ELS
Tableau 2-4 : combinaisons d'actions à l'ELS
|
combinaison
|
nom
|
Type d'analyse
|
Nature de la
combinaison
|
définition
|
|
1
|
Comb3
|
Analyse linéaire
|
ELS
|
1* « cas1 »+1* « cas2 »
|
|
2
|
Comb 4
|
Analyse linéaire
|
ELS
|
1* « cas1 »+1* « cas3 »
|
2-5 Les normes du vent
On admet que le vent a une direction d'ensemble moyenne
horizontale. L'action du vent sur un ouvrage et sur chacun de ses
éléments dépend des caractéristiques suivantes [5]
:
2-5-1 La zone où se situe la construction :
On définit une pression dynamique de base normale
q10. Selon les données climatiques, le
Cameroun est découpé en huit zones
jouissant des mêmes caractéristiques climatiques.
L'étude
des vents de surface montre que le Cameroun est soumis
à deux types de vents principaux [10]:
- Quadrant sud-ouest, c'est le vent océanique
vecteur de flux humide.son influence est primordiale une bonne partie de
l'année dans le sud Cameroun alors qu'il n'est ressenti qu'en saison de
pluies dans le nord du pays.
- Quadrant nord - est : c'est l'harmattan, souverain
dans le nord du pays pendant plus de six mois est encore ressenti en saison
sèche au sud de l'Adamaoua et en particulier dans les régions de
l'ouest. Le découpage est le suivant :
Tableau 2-5 : principales zones climatiques au Cameroun
|
Zones climatiques
(principale ville de la
zone)
|
Altitude
moyenne (m)
|
Vitesse maximale
observée (m/s)
|
Pression dynamique de base à la
hauteur de 10
m au dessus su sol
(Pa)
|
|
1. Yaoundé
|
850
|
31
|
1243
|
|
2. Kribi
|
19
|
30
|
1163
|
|
3. douala
|
850
|
32
|
1324
|
|
4. Bertoua
|
700
|
45
|
2618
|
|
5. Bamenda
|
1700
|
21
|
570
|
|
6. N'Gaoundéré
|
1200
|
58
|
4349
|
|
7. Garoua
|
400
|
50
|
3232
|
|
8. Maroua
|
600
|
50
|
3232
|
|
2-5-2 La hauteur de la construction
La pression qH qui s'exerce à une hauteur H
(exprimée en m), s'exprime :
qH = 2.5 H+18
H+6 0 q10
|
(2-6)
|
2-5-3 Le site où se situe la construction : ks
Tableau 2-6 : type de site
|
Type de site
|
exemples
|
ks
|
|
Site protégé
|
Fond de cuvette bordé de collines sur tout son
pourtour et protégé ainsi pour toutes les directions du
vent
|
0.8
|
|
Site normal
|
Plaine ou plateau de grande étendue pouvant
présenter des dénivellations peu importantes, de pente <
10%
|
1
|
|
Site exposé
|
Littoral sur une profondeur de 6km, sommet des falaises,
iles ou presqu'iles étroites, vallées étroites où
le vent s'engouffre, montagnes isolées ou élevées, et
certains cols
|
1.35
|
2-5-4 L'effet de dimension: 6
L'action du vent s'exerçant sur une paroi n'est
pas uniforme en raison des tourbillons locaux (plus faible plus la surface est
grande). On tient pour cette raison compte de ce phénomène par
l'utilisation du coefficient ö, dit coefficient de
réduction des pressions dynamiques [Annexes 2].
2-5-5 L'effet de masque: km
De manière générale, on ne tient
pas compte des effets de masque dus aux autres constructions masquant
partiellement ou intégralement la construction étudiée. On
utilise alors km = 1.
2-5-6 De la forme de la construction : Ce - Ci
Dans le cadre de notre étude, ce coefficient est
pris égal à 1 selon [11]
2-5-7 Des actions dynamiques: 13
Aux effets statiques précédemment
définis s'ajoutent des effets dynamiques qui dépendent des
caractéristiques mécaniques et aérodynamiques de la
construction. Ces actions dynamiques dépendent entre autres de la
fréquence propre fondamentale de vibration de la construction et sont
caractérisées par le coefficient de majoration ~
(pour les actions parallèles à la direction du vent)
[5].
~ = O (1+ ~.
T) (2-7)
~ : Coefficient de réponse fonction de la
période T du mode fondamental « Annexe 2-b »
~ : Coefficient de pulsation dépendant de la
hauteur H de chaque niveau considéré. << Annexe 2-
c>>
0 = 1 pour les constructions prismatiques
[11]
Les périodes calculées dans le cadre de ce
projet sont très faible et donc ~ est presque nul. On
prendra ~ =1 selon [11]
2-6 Détermination de la pression de calcul du
vent.
La pression statique de calcul du vent est finalement
donnée par la formule suivante:
q =q10*o*ks*km*Cr * ~ (2-8)
2-7 Action d'ensemble sur le pylône
Cette action permet de calculer les
éléments principaux assurant la stabilité de l'ouvrage.
L'action d'ensemble du vent soufflant dans une direction donnée sur une
construction est la résultante géométrique de toutes les
actions sur les différentes parois. Pour le cas des pylônes, il
s'agit de la composante horizontale T qui est la
Traînée, produisant un effet
d'entraînement et de renversement ;
T=q*Ct*Sp (2-9)
Ct =Le coefficient de trainée << voir
chapitre3, § 4 >> Sp = surface pleine de la paroi
<< voir chapitre3, § 4 >>
2-7-1-1 Action d'ensemble sur les antennes
Seules les antennes FH et GSM (figures 1-3 et 1-4)
seront prises en considération dans le dimensionnement des
pylônes. La prise au vent de ces antennes s'effectue de la façon
suivante: pour chaque antenne, suivre les étapes suivantes :
- calculer sa surface effective Sa (fonction de la forme
de l'antenne);
- repérer sa position P par rapport au pied du
pylône ;
- relever le coefficient de trainée Ct
correspondant en fonction de son azimut; - déterminer
la surface équivalente :
Seq = Ct. Sa. P/H (2-1 0)
Où H est la hauteur du pylône ;
% appliquer la même opération pour toutes
les antennes et sommer ces surfaces : cette surface est appelé charge en
tête du pylône. Cette surface correspond à celle d'une
antenne fictive placée sur l'entête du pylône.
% Il faut multiplier la charge en tête par la
pression dynamique en tête pour avoir la force qui sera appliquée
horizontalement à l'en tête du pylône. Si on note
Feq la force créée par l'antenne, on aura
Feq = Ct. QH. Seq (2-11)
Cette force est appliquée normalement sur les deux
noeuds supérieurs au vent. Le tableau ci-contre récapitule le
calcul de la charge en tête d'un pylône.
Tableau 2-7 : Calcul du coefficient de trainée sur les
antennes
|
Azimut
|
0
|
15
|
30
|
45
|
60
|
75
|
90
|
105
|
120
|
135
|
150
|
165
|
180
|
|
Ct
|
1.312
|
1.289
|
1.222
|
1.122
|
1.037
|
0.696
|
0.644
|
0.742
|
0.821
|
0.94
|
0.987
|
1.066
|
1.148
|
Tableau 2-8 : calcul de la charge en tête d'un
pylône
|
Antenne de transmission
|
|
Quantité
|
Diamètre
(m)
|
Sa (m2)
|
Coef de trainée
|
position
|
Hauteur du
pylône
|
Seq1 (m2)
|
|
ni
|
di
|
Pi.di2/4
|
Cti
|
Pi
|
H
|
Sai.Pi/H
|
|
Antenne radio
|
|
Quantité
|
longueurs
|
Sa
|
Coef de trainée
|
position
|
H (m)
|
Seq2
|
|
mi
|
L i
|
li
|
Li.li
|
Cti
|
Pi
|
H
|
Sai.Pi/H
|
|
Surface en tête totale
(m2)
|
Seq1 +Seq2
|
L'antenne placée sur l'en tête du
pylône crée une excentricité qui provoque un moment de
torsion sur les membrures. Ce moment est égal à la force en
tête multiplié par cette excentricité.
L'excentricité est prise forfaitairement égale à 50 cm.
[11]
La surface en tête du pylône sera donc la
somme des surfaces des antennes GSM et FH. La surface en tête
étant connue, il suffit de la multiplier par la valeur de la pression
correspondante à la hauteur du pylône pour avoir la force. A cette
force de vent, s'ajoute le poids propre de l'antenne et le moment crée
par l'excentricité des antennes.
2-8 Dimensionnement
L'instabilité à vérifier est le
flambement. Il est très important de vérifier que les
éléments comprimés (barres comprimées de treillis)
présentent une sécurité suffisante vis à vis du
flambement car celui-ci se produit sans prévenir et entraîne
souvent non seulement la propre ruine de l'élément, mais aussi
celle de tout le pylône.
2-8-1 L'analyse globale du premier ordre
Le but de l'analyse globale est d'abord de
déterminer la distribution des sollicitations à
l'intérieur des différents composants du pylône. Le
comportement mécanique du pylône sous les charges qui lui sont
appliquées est traité par GENIE en utilisant la méthode
des éléments finis. Le calcul est basé sur la
théorie linéaire ou au premier ordre des poutres qui suppose les
hypothèses suivantes :
- les déplacements des sections sont petits : les
équations d'équilibre statique sont écrites en prenant en
compte la géométrie de la structure non déformée
;
- le matériau, notamment l'acier, a un
comportement élastique linéaire : effort et déformation
sont proportionnels et il y a réversibilité c'est-à-dire
que la structure revient à son état initial dès que la
perturbation qui l'en a écartée disparaît ;
- les assemblages sont idéalisés sous la
forme d'assemblages rotulés.
2-8-2 Vérification de la résistance des
sections transversales de classe 3.
2-8-2-1 Traction
La valeur de calcul de l'effort de traction
NED dans chaque section transversale doit satisfaire la condition
suivante [4]:
NED ~ #$%&
'~ (2-12)
Où A est l'aire de la section transversale, fy est
la limite élastique du matériau et 7M0 est le
coefficient partiel de sécurité portant sur la résistance
mécanique du matériau caractérisée par sa limite
élastique. Ce coefficient est actuellement être pris égal
à 1
2-8-2-2 Compression
La valeur de calcul de l'effort de compression
NEd dans chaque section transversale de classe 1, 2 ou 3 doit
satisfaire la condition suivante [4]:
NED ~ #$%&
'~ (2-13)
2-8-2-3 Résistance au flambement -
Elément comprimé
Le flambement est le mode de ruine
prépondérant et le plus dangereux des composants
comprimés. Il se traduit par une déformation de flexion brutale
du composant à partir d'un niveau donné de l'effort de
compression. Une barre comprimée doit donc être
vérifiée vis-à-vis du flambement de la façon
suivante:
N Ed ~ N b,Rd (2-14)
Où Nb,Rd est la valeur de calcul de la
résistance de la barre comprimée au flambement. Pour des sections
transversales de classe 1, 2 ou 3 on a [4]:
N b,Rd = x.A.fy
YM1 (2-15)
Où YM1 est le coefficient partiel
de sécurité de résistance et qui vaut 1.1. [4]
x est le coefficient de réduction pour le mode de
flambement. Il est donné par la formule
x= (13402- .2
mais z = 1.0 ( 2-16)
où (p = 0.5 [1+
a ( A - 0.2) + A2]
a est un facteur d'imperfection, pour les
cornières à ailes égales, il est égal à 0.49
[2]: A est l'élancement réduit donné
par:
A = X / X1 (2-17)
X1 =ð ( E /
fy)0.5 (2-18)
I, = Ler/iv (2-19)
iv est le rayon de giration suivant l'axe
concerné, déterminé à partir des
caractéristiques brutes de la section.


Figure 2-5 : Algorithme de calcul du coefficient de
réduction
2-8-2-4 Vérification aux états limites de
service
° Flèches horizontales
La flèche en tête du pylône doit
être inférieure à h/200 où h est la hauteur du
pylône [4] et [11]. ° Twist
Cet angle doit être inférieur au
dépointage imposé par OCM
2-8-3 Algorithmes de vérifications
Dans cette partie, nous donnons l'algorithme du
processus de diagnostic basé sur l'Euro code 3 à partir de toutes
les vérifications présentées précédemment.
L'ensemble de ces algorithmes est intégré dans GENIE. La figure
(2.6) donne un aperçu global sur le diagnostic imposé par
l'Eurocode 3. L'analyse linéaire par GENIE permet de déterminer
les valeurs de calcul des efforts dans les barres, les déplacements aux
noeuds et les fréquences propres de la structure. Ces valeurs sont
utilisées pour la vérification d'états limites ultimes et
d'états limites de service pour chaque élément de la
structure.

Section mauvaise
Figure 2-6 : algorithme de dimensionnement au flambage
2-9 Conclusion
Dans ce chapitre nous avons présenté les
exigences relatives au calcul des différentes contraintes et à la
stabilité des éléments des structures tendues ou
comprimées (treillis plans). Le calcul des sollicitations dans les
éléments est basé sur l'analyse globale élastique
linéaire ou analyse au premier ordre
chapitre-3 Formulation des éléments
finis
3-1 Introduction
Les pylônes que nous calculons font partie des
structures discrètes qui sont composées d'éléments
barres assemblées par boulonnage en des points appelés
«noeuds», et soumises à des forces extérieures que sont
: la pression due au vent, le poids propre du pylône et des antennes.
Sous l'effet de ces forces, le pylône peut se déformer et des
contraintes internes dans chaque élément peuvent se manifester.
Cette dernière est entièrement définie par les
caractéristiques géométriques de la section courante
(aire, module d'Young etc.) et la géométrie de la fibre moyenne.
Les efforts appliqués à chaque barre sont
schématisés comme charges ponctuelles. Les sollicitations
résultantes sont obtenues sous la forme d'un seul effort (effort axial)
en chaque point de la fibre moyenne. Des relations simples reliant l'effort aux
caractéristiques géométriques de la section permettent de
déduire les contraintes dans la section. L'application de la
théorie des poutres à des structures simples comme les treillis
simples, conduit à des solutions analytiques complètes. En
revanche, pour les structures plus complexes comme le pylône, le recours
à une méthode numérique est nécessaire telle que la
méthode aux éléments finis qui est systématiquement
et aisément programmable. Le problème de l'analyse
linéaire des structures formées de poutres par la méthode
des éléments finis est bien connu. Nous nous limiterons, ici,
à évoquer les formulations éléments-finis
utilisées dans le GENIE avec les références
nécessaires pour l'analyse statique et modale des structures de type
treillis plans obtenus par assemblage de barres articulées aux
extrémités. Les éléments d'un treillis ne
travaillent qu'en traction ou compression. Ils sont modélisés par
des éléments finis de type barres (figure 3-1).

Figure 3-1 : discrétisation en
éléments finis d'un treillis plan
3-2 Concept de base de la méthode des
éléments finis
La méthode des éléments finis
(M.E.F.) est un des outils les plus efficaces et les plus
généraux pour l'analyse des structures dans de nombreux secteurs
de l'industrie : aérospatial, automobile, nucléaire, génie
civil, construction navale, mécanique, constructions off-shore, etc.
Dans le domaine du calcul des structures, la M.E.F. est une technique à
caractère pluridisciplinaire qui met en oeuvre des connaissances
relevant de plusieurs disciplines de base telles que la mécanique des
structures, l'analyse numérique et l'informatique appliquée. Les
bases théoriques de la M.E.F. reposent d'une part sur les
méthodes énergétiques de la mécanique des
structures et d'autre part sur les méthodes d'approximation spatiale des
fonctions. La M.E.F. est basée sur une décomposition du domaine
dans lequel on désire effectuer la simulation en sous-domaines de forme
géométrique simple appelés « éléments
finis » pour lesquels on procède à des approximations
nodales des champs de déplacements ou de contraintes qui prennent en
général la forme de fonctions polynomiales. L'ensemble de ces
éléments constitue ce que l'on appelle le maillage du domaine.
Ces éléments sont liés par un nombre fini de conditions de
continuité, exprimées en certains points communs à
plusieurs éléments appelés `noeuds'. Ce sont les
méthodes classiques du calcul des structures, méthode des
déplacements et méthode des forces, qui sont à la base de
la M.E.F. Selon que l'on approxime le champ des contraintes ou le champ des
déplacements, on crée le modèle contrainte ou le
modèle déplacement. Le modèle déplacement semble
plus commode à mettre en oeuvre car il s'adapte
généralement mieux aux problèmes de calcul des structures
et sera adopté dans ce qui suit. Dans la méthode des
déplacements, la formulation du problème est faite en fonction
des déplacements aux noeuds qui sont les inconnues cinématiques.
La structure est préalablement discrétisée en
éléments finis. Le
calcul est conduit suivant deux niveaux de formulation :
élémentaire au niveau de l'élément fini et globale
au niveau de la structure complète.
3-2-1 La formulation élémentaire au niveau de
l'élément fini
Pour chaque élément et dans un
repère local, on choisit une fonction d'interpolation qui
représente la variation des déplacements à
l'intérieur de cet élément en termes de
déplacements nodaux. Puis, on calcule pour chaque élément
ses matrices de rigidité et de masse ainsi que son vecteur des forces.
Ces caractéristiques élémentaires sont transformées
par la suite dans le repère global de la structure.
3-2-2 La formulation globale au niveau de la structure
complète
Elle consiste à rechercher pour la structure
complète l'expression matricielle de l'énergie potentielle en
fonction des déplacements inconnus en tous les noeuds de la structure.
Cette étape nécessite l'assemblage des matrices de
rigidité et de masse et les vecteurs forces et déplacements de la
structure à partir des caractéristiques
élémentaires (matrices de rigidité et de masse et vecteurs
forces et déplacements de chaque élément).
3-3 Démarche de formulation
éléments finis
L'analyse des structures de type treillis peut
s'effectuer en considérant d'abord le comportement de chaque partie
(élément barre) indépendamment puis en assemblant ces
parties de telle façon que l'équilibre des forces et la
compatibilité des déplacements soient satisfaits en chaque noeud.
[2] et [7]
Dans la suite, toutes les grandeurs vectorielles et
matricielles relatives à la base locale de l'élément sont
surlignées d'une barre.
3-3-1 Discrétisation de la structure en
éléments finis
C'est l'ensemble des opérations à
effectuer pour établir le modèle mathématique de calculs
représentant au mieux la structure réelle. Pratiquement cette
idéalisation consiste du point de vue topologique, à ramener la
structure à une géométrie simple ; c'est ainsi qu'on
réduit les éléments unidimensionnels à leur axe et
on définit les conditions d'appuis et les charges. Au
point de vue rhéologique, elle consiste à
choisir la loi constitutive du matériau et à déterminer
les constantes qui définissent cette loi.
3-3-2 Construction de l'approximation nodale par sous
domaine
Pour chaque élément, on choisit une
fonction d'interpolation qui représente la variation des
déplacements ue (x, y)
à l'intérieur de cet élément en termes de
déplacements nodaux Ile. Ce
modèle peut être représenté de façon commode
par une expression polynomiale contenant un coefficient inconnu pour chaque
degré de liberté. Soit, [2] et [7]
ue (x, y) = N t
~le ( 3-1)
Où N est la matrice d'interpolation reliant les
déplacements d'un point intérieur de l'élément aux
déplacements nodaux.
3-3-3 Etablissement de la relation entre
déformations et déplacements
Il s'agit ici de trouver la matrice B reliant les
déformations 8 de l'élément à ses
déplacements nodaux Ule.
Cette relation est exprimée par :
{ e }= Â Ule
(3-2)
3-3-4 Etablissement de la relation entre contraintes et
déformations
Pour un matériau élastique linéaire,
les contraintes a sont des fonctions linéaires des
déformations E. Elles sont exprimées par
l'expression :
{0 }= D { e }
(3-3)
Où D est la matrice
d'élasticité.
3-3-5 Calcul des matrices élémentaires.
Cette étape constitue la partie la plus
importante du problème. Les déplacements Ue aux noeuds
sont déterminés de telle façon que les contraintes
engendrées dans l'élément équilibrent le chargement
extérieur Fe, c'est-à-dire que :
/le Ile =
Pe ( 3-4)
Ile est la matrice de
rigidité de l'élément exprimée dans le
repère local. Elle est déduite de l'énergie de
déformation de l'élément et exprimée par [2] et [7]
:
ke=f
vBt D B dv (3-5)
Il faut aussi calculer la matrice de masse
Me de chaque
élément. Cette matrice est déduite de l'énergie
cinétique de l'élément. Dans le repère local de
l'élément, cette matrice est donnée par l'expression [2],
[7]
Me=f
vpNt N dv ( 3-6)
où p est la masse volumique du
matériau constituant l'élément.
Finalement, on exprime les matrices K~
e, me, Ue
et Fe dans le
repère global défini pour toute la structure.
3-3-6 Assemblage des matrices
élémentaires
La phase de l'assemblage consiste à construire
les matrices K, M et F de la structure complète à partir des
matrices élémentaires
Ke,
Me,
U~e et
F~e exprimées dans le repère
global, des différents éléments en sommant les
énergies de déformation et cinétique de chaque
élément. Pour une structure formée de barres, on ne peut
pas sommer les matrices directement, car elles ne sont pas exprimées en
fonction des mêmes variables. Pour chaque élément, il faut
localiser la position des variables nodales dans le vecteur des
déplacements de l'ensemble des noeuds de la structure. Cette
opération consiste à ranger les termes des matrices
élémentaires dans une matrice globale.
Exemple d'assemblage : [6]
Il y a lieu de remarquer lors de l'assemblage des deux
systèmes élémentaires que les composantes qui
correspondent au noeud n occupent les positions 2×n et 2×n-1 dans la
matrice globale. On généralise ainsi cet assemblage en calculant
une table de localisation à partir de la table des
connectivités.
3-4 Elément fini barre
3-4-1 Définition
Géométriquement, une barre correspond
à un solide orienté dans la direction x (repère local).
Les dimensions dans le plan (y--z) normal à x sont
relativement petites par rapport à la
dimension longitudinale (figure 3-2). Un
élément fini barre (figure 3-3) schématise un composant
d'une structure qui travaille uniquement en traction ou compression. C'est
généralement un élément à 2 noeuds, qui
comporte 3 inconnues ou degrés de liberté (d.d.l.) par noeud
représentant les composantes de son déplacement dans
l'espace.


Figure 3-2 : géométrie d'un élément
barre

Figure 3-3 : modélisation d'un élément
barre
Les principales hypothèses pour un
élément barre rectiligne qui ne travaille qu'en traction ou
compression sont :
- Petits déplacements
,
U
|
,
(M, t) = u
|
(x, t) x
|
( 3-7)
|
|
- Déformations en petits déplacements
:
- Loi de Hooke dans un milieu isotrope homogène
élastique :
avec a, la contrainte dans la barre et E
est le module de Young du matériau. En intégrant les contraintes
sur la section A, nous obtenons la loi de comportement intégrée
des barres:
n(x) = E A E (3-1 0)
Où n(x) est l'effort normal dans la barre dû
à la force nodale F.
3-4-2 Formulation de l'élément barre dans le
plan
3-4-2-1 Identification du problème
Considérons un élément barre dans le
plan défini par deux noeuds i et
j, de longueur L et de section uniforme A (figure
3-4).

Figure 3-4 : élément barre dans le plan (i
,x,y)
Dans le repère local (i,.,~ y),
on note par uxi et
1~xj les déplacements aux noeuds i
et j, et
|
~
|
~
|
|
par f xi
et f
|
xj les forces aux noeuds i et
j. Le vecteur force relatif à
l'élément e est donné par
:
|
xj f~yj] (3-11)
~
~
~
Fe= [ f
xi fyi f
Le vecteur déplacement est donné
par:
U~e=
[Uxi
Uyi
Uxj
Uyj] (3-12)
~ ~
Dans le cas qui nous occupe,
fyi fyj,
Uyj et
Uyj sont nuls puisque
l'élément barre ne travaille qu'en traction ou
compression.
3-4-2-2 Fonction d'interpolation
Pour un problème statique, lorsque
l'élément est chargé au niveau de ses noeuds, l'effort
normal est uniforme. Compte tenu des relations (3.8) et (3.10), la solution
u(x) sera linéaire. Pour chercher cette solution, nous allons utiliser
une approximation polynomiale linéaire de la forme :
u(x) = N1 fixi
+ N2 fixj
(3-13)
où N1 et N2 sont les coordonnées
naturelles.
Nous identifions aux noeuds i
(x=0) et j (x=L) la valeur de
l'approximation des déplacements axiaux. Nous en déduisons
:
N1= 1- xi et N2=
xi (3-14)
Sous forme matricielle nous écrivons :
U(x)=Nt Ue = [1- A B A
B]C9A~
9A~D (3-15)
La matrice N d'interpolation reliant les
déplacements d'un point intérieur de l'élément aux
déplacements nodaux est donc :
N= [1- x x]t
(3-16)
/ /
3-4-2-3 Relation entre déformation et
déplacement
La déformation est déduite des expressions
(3.8) et (3.13). Soit :
E=
du dx=
11[-1 1]C9A~
9A~D = B Ue (3-17)
La matrice B reliant les déformations de
l'élément à ses déplacements nodaux est
alors
 = 11[ 1 1]
(3-18)
3-4-2-4 Matrice de rigidité d'une barre dans le
plan
La forme de la matrice de rigidité 2
e de l'élément dans le
repère local est donnée par l'expression (3.5). La matrice
d'élasticité D se réduit au scalaire E (module de Young du
matériau). Soit, après intégration :
|
Ke = A*E
1
|
[1I~
I ~ J (3-19)
|
3-4-2-5 Matrice de masse d'une barre dans le plan
La matrice de masse Me dans le repère
local est déterminée à partir de l'expression (2.6). Soit,
après intégration :
Me =
p*A*1 [2 11 (3-2 )
6 2
L'expression de la matrice masse telle qu'elle est
obtenue en (3.20) est appelée masse cohérente ou répartie.
Il est possible de concentrer la masse de l'élément en ses
extrémités. On attribue à chacun des deux noeuds la
moitié de la masse totale de l'élément soit :
Me
KF#FB
~ H
= J ~~~~~~
3-4-2-6 Transformation dans le repère
global
Soit uxi , uyi , uxj et uyj les déplacements
aux noeuds i et j
exprimés dans le repère global (figure 3.5). La
relation entre les déplacements exprimés dans le repère
local et ceux exprimés dans le repère global est donnée
par :
1xi =uxi cx+ uyi
cy (3-22)
1xj =uxj cx+ uyj
cy
Oil cx et cy sont les cosinus directeurs définis
par :
~ ~
cx= B (xj-xi) et cy=
B (yj-yi) ~~~~~~
Avec l la longueur de l'élément
calculée à partir des coordonnées des noeuds. Soit
:
l=*(xj -- x02 + (yj -- yi)2 (3-24)
Sous forme matricielle, on écrit :
9A
C9A~
u31
La matrice transformation du repère local au
repère global est :
9A~D =CRA R& 9&
RA R&D S 9A T ~~~~~~
T = rcx cy 001
0 0 cx cy (3-26)
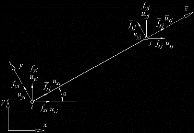
Figure 3-5 : élément dans le repère
global
La matrice de rigidité exprimée dans le
repère global sera déduite de la matrice de rigidité
exprimée dans le repère local par la relation [2],
[7]:
Ke = Tt
Ke T (3-27)
De même, la matrice de masse de
l'élément barre dans le plan exprimée dans le
repère global est donnée par l'expression.
Me = Tt Me T
(3-28)
3-4-2-7 Charges appliquées sur les
éléments
Dans le cas d'une charge répartie q sur un
élément, celle-ci est rapportée aux noeuds
d'extrémités. Le vecteur de charge nodale correspondant est
:
Fer = f
Nt q ds (3-29)
Pour une charge uniformément répartie sur
un élément poutre dans le plan (figure 3.6), le vecteur de
charges nodales équivalent est :
B
Fer= q f 0 Nt dl
(3-3 0)
Pour une barre de treillis, la notion de charge
répartie transversale n'est pas cohérente avec la théorie,
la modélisation de type barre ne prenant pas en compte la raideur
flexionnelle. La force répartie d'une barre doit être
modélisé par deux forces, concentrées aux noeuds
d'extrémités, statiquement équivalentes au poids total de
la barre (figure 3.6)
Fer = [0
-(121
0 (121] (
3-31)

Figure 3-6 : force répartie sur une barre
Soit un tronçon donné du pylône, le
vent agit uniformément sur toutes les barres du
tronçon.
- qH est la pression statique du vent,
- Sp la surface pleine du tronçon, celle qui est
en contact avec le vent, - Si, la surface totale, les vides
étant obturés
Suivant [5],
el =Sp/Si (3-32)
cI est généralement compris entre 0.08 et
0.35. Pour les constructions prismatiques, le coefficient de trainée est
égal à : [5]
Ct = 3.20 - 2.0 ( 3-33)
L'action d'ensemble T s'exerce sur tous les
éléments du tronçon (figure3-7). Cette action est ensuite
répartie sur les membrures (figure 3.8) et devient T/2.l
où l est la longueur de la membrure. En
appliquant la formule (3-31), on transforme cette force linéique en
force ponctuelle (figures 3-9 et 3-10). Le même travail est fait pour les
autres tronçons. La figure 3-9 est l'illustration d'un tronçon du
pylône sous l'action du vent.
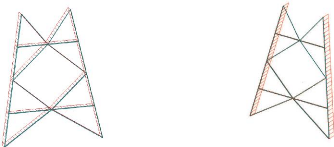
Figure 3-8 : force répartie sur les barres Figure 3-7 :
force répartie sur les membrures

Figure 3-10 : force nodale Figure 3-9 : force nodale
3-5 Formulation d'un élément poutre en
torsion
3-5-1 La matrice de rigidité
Considérons la poutre représentée
à la figure (3-11) sollicitée par un moment de torsion
mx.

Figure 3-11 : Elément poutre en torsion
La rotation varie linéairement le long de la
longueur de la poutre et peut être exprimée de la manière
suivante :
Ox = N1 Oxi+N2
Oxj (3-34)
oil N1 et N2 sont les coordonnées naturelles
définies par l'expression (3.14). L'angle á de
torsion le long de l'élément est donné par :
d0x
á = dx
1,[-1 1][
t] = (3-35)
Le moment de torsion mx est exprimé par
:
mx= G It á = G
It 1,[-1 1] (3-36)
oil It est le moment d'inertie de torsion et G est le
module de cisaillement du matériau. En assimilant le moment
mx à la contrainte ó, les matrice B
et D sont données par :
D = G It ( 3-37)
 = / 1
[ 1 1] (3-38)
Compte tenu de l'expression (3.5), la matrice de
rigidité de l'élément fini poutre en torsion
exprimée dans le repère local est :
Ke = G*1 It [ --1 1
-. 1 --11 (3-39)
3-6 Résolution en analyse statique
3-6-1 Systèmes d'équations
linéaires
L'analyse statique consiste à calculer la
réponse statique linéaire d'une structure soumise à des
charges ponctuelles ou réparties. Dans le cas statique l'énergie
potentielle s'écrit [7]:
Ð=1UtK U
-Ut F (3-40)
2
Les extremums de cette énergie sont :
??/ ?U = KU - F
= 0 (3-41)
D'où:
KU = F (3-42)
La résolution de ce système linéaire
permet de déterminer le vecteur U des déplacements inconnus. On
calculera par la suite, les réactions, les efforts et les contraintes
dans les éléments de la structure
3-6-2 Prise en compte des conditions de déplacement
imposé
Dans l'expression l'équation (3-42), la matrice
de rigidité K de la structure est singulière. Cela implique qu'il
existe des déplacements qui doivent être éliminés en
introduisant les conditions aux limites cinématiques. Avant de
résoudre ce système d'équations pour déterminer le
vecteur U des déplacements inconnus, il faut donc prendre en compte les
conditions aux limites. Pour appliquer cette condition, on élimine les
lignes et les colonnes correspondants dans les matrices K
et M ainsi que du vecteur
F.
3-6-3 Résolution du système
linéaire
La résolution du système permet de
déterminer le vecteur Ui des déplacements inconnus. En pratique,
la matrice K à laquelle on aboutit est de grande taille. Le coût
de la résolution numérique de ces systèmes
d'équations est une partie significative du coût global de
l'analyse. Il existe des méthodes de résolution
appropriées qui tirent profit du caractère symétrique de
la topologie de la matrice de rigidité. La matrice présente
quelques propriétés intéressantes qui peuvent être
exploités pour résoudre efficacement le système
[3]:
- Symétrique,
- Définie positive (toutes les valeurs propres
sont positives), - Disposée en bande autour de la
diagonale,
- A diagonale dominante,
- La matrice K est très bien conditionnée
(conditionnement =1).
Pour que la matrice remplisse les conditions
ci-dessus, il est important de bien numéroter les noeuds. Pour les
structures à deux dimensions, la matrice de rigidité a
généralement la forme de la bande matrice si les points nodaux
sont bien numérotés, tel que la largeur de la bande de la matrice
de rigidité soit plus étroite. Et donc les problèmes de
stockage peuvent être réduites et les équations sont
résolues en utilisant la méthode d'élimination directe au
lieu des itérations, la largeur de la bande pour une structure
assemblée d'éléments finis est trouvée par
l'équation générale suivante [9]:
L = 2[mn
+ ( n -1)]+1 (3-43)
m : La différence maximale entre deux
noeuds d'un même élément fini.
n : Nombre de degrés de liberté
pour chaque noeud.
Exemple de numérotations:

Numérotation horizontale :
Dans cet exemple tel que la numérotation des
points nodaux est horizontale, la largeur de la bande de la matrice pour une
structure à deux dimensions vaut : L=19
Numérotation verticale
Dans cet exemple tel que la numérotation des
points nodaux est verticale, la largeur de la bande de la matrice pour une
structure à deux dimensions vaut: L =
23
Donc la largeur de la bande est minimale dans le premier
système de numérotation c'est à dire la
numérotation horizontale, elle sera donc adoptée dans la suite de
ce travail.
La méthode la plus pratique pour résoudre
ce genre de problème est celle de CHOLESKY (voir. chapitre 3, §
8).
3-6-4 Calcul des efforts
Les efforts intérieurs se calculent
élément par élément à partir des
déplacements exprimés dans le repère local de
l'élément. Ils sont obtenus en écrivant les
équations élémentaires d'équilibre ; soit en
statique pour un élément,
~~ei =
Ke ~~e i (3-44)
La somme des efforts exercés sur un noeud doit
être nulle. Nous pouvons donc tester la précision de la
résolution du système en calculant les résidus
d'équilibre locaux. Les contraintes sont calculées à
partir des efforts en fonction de la forme et des dimensions de la section
transversale.
3-7 Résolution en analyse modale
3-7-1 Système d'équations aux valeurs
propres
La recherche des fréquences et modes naturels
d'une structure s'appelle l'analyse modale. L'énergie potentielle
Ð totale de la structure due aux vibrations libres de
l'élément est : [6]
n =21Ut K U
+1 Ut MU
·
·
(3-45)
2
Les extremums de cette énergie sont donnés
par la relation :
|
·
·
an/ aU =
MU
|
+ KU = 0 (3-46)
|
Et l'équation matricielle associée à
l'analyse électrodynamique pour un régime libre est
définie
par :
·
·
MU
+ KU = 0 (3-47)
Les solutions recherchées pour l'équation
sont régies par une loi temporelle et, pour autant que la matrice de
rigidité soit non singulière, sont de type harmonique
u(t) = p a cos (wt
- co) (3-48)
a, 03 et (p sont des nombres
réels dénotant respectivement l'amplitude de
référence, la pulsation et la phase de la fonction. Cette
relation traduit physiquement que chaque d.d.l. de la structure suit un
mouvement en phase avec tous les autres déplacements
généralisés. Compte tenu de cette expression,
l'équation (3 - 47) associée au régime libre devient
:
(K - co2M) p
= 0 (3-49)
Ce système homogène de n équations
linéaires admet n solutions non triviales pi (i =
1,2,..., n) telles que soient vérifiées les
équations :
(K - co2iM)
pi = 0 i = 1, 2, ..., n ( 3-5 0)
alors que
ui = pi ai cos (coi t
- (pi) (3-51)
est le mode propre élastique de rang i à
amplitude de référence ai et de déphasage
(pi. En termes de mécanique des structures le vecteur
pi est le vecteur modal et coi est la pulsation propre
associée, mesurée en rd/s. Les grandeurs co sont
les racines de l'équation algébrique suivante
det (K -
w2M) = 0
(3-52)
3-7-2 Résolution du système aux valeurs
propres
La résolution d'un système aux valeurs
propres est beaucoup plus coûteuse que celle d'un problème
statique. En fait, il s'agit d'un problème non linéaire, et
beaucoup de méthodes s'appuient sur la résolution d'une
succession de systèmes linéaires, en interne. De nombreux
algorithmes performants ont été développés pour
l'extraction numérique des caractéristiques modales d'une
structure. Pour la résolution du système, nous avons
utilisé la méthode de factorisation QR qui est un sous module de
matlab. Cette méthode est généralement
considérée comme étant la plus robuste et la plus
performante pour déterminer l'ensemble des valeurs propres quand les
matrices structurelles sont de petite taille ou à grande largeur de
bande [3] et [6]
3-8 Algorithmes de résolution
La mise en oeuvre d'un programme
d'éléments finis pour les structures d'assemblage de barres
nécessite en premier lieu une bonne organisation du fichier de
données. Le programme destiné au calcul de notre pylône
doit avoir une structure qui permet d'effectuer trois grandes tâches :
lecture de données, traitement des données, calcul de la solution
et affichage des résultats. Ce processus peut être décrit
par l'organigramme de la figure.

Figure 3-12 : Organigramme d'analyse linéaire par la
M.E.F. d'une structure à de poutres
3-8-1 Lecture des données
La partie du programme destinée à la
lecture des données doit pouvoir construire des variables pour la
géométrie du pylône, la charge en tête du
pylône, le poids des antennes, la zone géographique, les
cornières à utiliser et le chargement extérieur. La
géométrie concerne la hauteur du pylône, les sections de
base et d'en tête, la charge en tête du pylône qui est la
somme
de toutes les surfaces des antennes placées sur
le pylône telle que calculée au tableau 2-7. La zone
géographique fait intervenir la zone où est placé le
pylône. Les cornières sont entrées sous forme d'une matrice
de 13 lignes correspondant aux 13 tronçons du pylône le plus haut
soit celui de 72 mètres et 5 colonnes, les colonnes représentent
les cornières à utiliser pour les membrures, les diagonales, les
traverses, les raidisseurs diagonales et les raidisseurs traverses
respectivement. Ces données sont entrées sur l'interface de
GENIE.
3-8-2 Traitement des données
Il s'agit ici de construire les éléments
nécessaires dont a besoin le programme d'éléments finis :
il s'agit de :
3-8-2-1 Les coordonnées et les
connectivités de tous les noeuds du pylône
Les coordonnées et les connectivités de
tous les noeuds sont calculées pour chaque type de tronçon en
fonction de sa grande base, sa petite base et sa hauteur. Le programme combine
les tronçons selon la hauteur du pylône en ajoutant aux
ordonnées des tronçons la hauteur du tronçon
précédent.
Exemple :
Soit pour un pylône de 36 mètres qui est
constitué successivement de 5 tronçons de type 4, un
tronçon de type 5 et un tronçon de type 6. (Figure
2-4)
- Etape1 : Les coordonnées et les
connectivités de tous les noeuds du premier
tronçon sont connues, il faut recalculer ces
coordonnées et ces connectivités 4 fois en modifiant à
chaque fois les grande et petite bases et en ajoutant aux ordonnées la
hauteur des tronçons précédents. Après ces
opérations, le pylône aura une taille de 30
mètres.
- Etape 2 : Nous ajoutons le tronçon de type 5
tout en augmentant aux ordonnées de
ce tronçon la hauteur de
30.
- Etape 3 : On termine en ajoutant le tronçon de
type 6 en augmentant également à
ses ordonnées la hauteur de 32
mètres.
Cette fonction que nous appelons « schéma
» est décrite en annexe 3-a. Le même travail est fait pour
les autres pylônes de hauteurs différentes.
La fonction « plotmesh » (annexe 3-g) permet
d'afficher le pylône qui est une figure du maillage, elle permet donc,
avec le tracé de la structure saisie, une vérification visuelle
des éléments et des noeuds :
3-8-3 Calcul de la solution
Une fois la géométrie saisie, on peut
calculer les matrices de rigidité et de masse assemblées. On
crée une fonction << truss2dKM » (annexe 3-i) pour les deux
matrices et à la fois. Les variables d'entrée communes aux deux
matrices sont : la hauteur, la base, l'en tête, la pression à 10
mètres, la charge en tête, la masse des antennes, le tableau des
cornières, le coefficient de site et la direction du vent
On ajoute les modules d'élasticité pour la
matrice de rigidité et les masses volumiques pour la matrice de
masse.
Il est à remarquer qu'on initialise les
matrices de rigidité et de masse avec des matrices creuses (sparse).
L'avantage qu'offre les matrices creuses est que seuls les
éléments non nuls sont sauvegardés en mémoire.
MATLAB est équipé d'une structure de données et de
plusieurs fonctions pour prendre en charge toutes les opérations
matricielles sur ce type de matrices et d'une façon pratiquement
imperceptible pour l'utilisateur. Pour la construction de ces matrices, on
introduit ici une table de localisation Li qu'on calcule avec la fonction
<< localise » (annexe 3- b) et qu'on utilise à la place de la
table des connectivités pour l'assemblage des matrices. Pour le calcul
des matrices élémentaires << fonction truss2dke »
(annexe 3-h), on a besoin de connaitre les coordonnées des noeuds, leurs
sections, la densité de l'acier et le module de Young. La longueur et
les cosinus directeurs de l'élément sont calculés à
partir des coordonnées de ses noeuds, ces longueurs, cosinus et sinus
sont par la fonction << etlen » (annexe 3-c)
3-8-3-1 Résolution du système
discret
a. Système linéaire KU =F
Les conditions d'appuis sont l'ensemble des
déplacements nuls aux niveaux des appuis. La matrice K initialement est
singulière. Le vecteur << nul » dans le fichier de
données est utilisé pour spécifier les degrés de
liberté à bloquer. Pour appliquer cette condition, on
élimine les lignes et les colonnes des matrices de rigidité et de
masse ainsi que du vecteur force puisque le
Chapitre3 : Formulation des éléments finis
chargement est saisi pour tous les noeuds y compris ceux d'appuis.
Cette opération rend la matrice K régulière. Voir fonction
« deldofs » (annexe 3-d)
La factorisation de Cholesky, consiste, pour la
matrice symétrique définie positive K, à déterminer
une matrice triangulaire inférieure L telle que : K=LLT. La
matrice L est en quelque sorte une « racine carrée » de A.
Nous nous servons de la fonction matlab « chol » pour
décomposer la matrice K en un produit de fonction triangulaire
inférieure et supérieure. Soit K=L*LT, il suffit de
résoudre successivement les systèmes linéaires
triangulaires supérieures et inférieures directement, une fois la
solution calculée, il faut ajouter les déplacements des noeuds
bloqués, voir fonction « addfos » (annexe 3-e).
b. Calcul des forces aux noeuds
Une fois les déplacements obtenus, il faut
parcourir toutes les barres en multipliant ces déplacements par les
matrices de rigidités élémentaires correspondantes. Cette
fonction s'appelle « Trussforces » (annexe 3-f).
3-8-3-2 Résolution modale
On peut calculer les modes propres de la structure avec
la fonction « eigs » qui résout le système
[K -- w2 M]
~ = 0 ( 3-53)
Elle prend en argument d'entrée les deux
matrice K et M et retourne
comme résultat deux matrices : l'une orthogonale pour les vecteurs
propres et l'autre diagonale pour les valeurs propres. Les modes propres sont
donc les colonnes de la matrice des vecteurs propres et les périodes
propres sont données par :
T = 2r/w.
(3-54)
3-9 Création de l'interface graphique
L'outil GUI Matlab offre la simple possibilité
de programmer des interfaces utilisateur dont le développement est
relativement simpliste. Chaque objet (boutons, graphiques, listes) est
défini par un certain nombre de fonction et de propriétés.
Les fonctions sont utilisées pour
exécuter la construction de l'objet, ainsi que
les événements le concernant (appui sur un bouton, choix dans une
liste...). La fonction la plus intéressante est la fonction de <<
Callback >> qui est appelée lors d'une action de l'utilisateur sur
l'objet. Les propriétés de l'objet sont stockées dans une
structure de données. On y accède avec les fonctions << set
>> et << get >>. Afin de passer toutes ces
propriétés de fonction en fonction, mais aussi de pouvoir
définir et stocker des variables globales, une super structure
appelée << handles >> est utilisée dans le
programme.
3-9-1 Etapes de conception
Il est clair que l'interface graphique passe par un
certain nombre d'étapes : [8]
- Planification: délimitation du problème
à résoudre,
- Analyse : Rassembler les équations
mathématiques nécessaires
- Le Cahier de charges : définir les fonctions et
tâches en détails : Enumérer les
différentes tâches voulues et rassembler les
données nécessaires,
- La Conception : compléter le cahier de charge
avec les détails de conception,
- Développer le design,
- Exemples d'écran (taille des
fenêtres...),
- Disposition des boutons,
- Les couleurs, la forme d'écriture.
|
Description Du Problème
|
|
Analyse Du Problème
|
|
Algorithme
|
|
Programme
|
|
Interface Graphique
|
|
|
|
|
|
|
|
|
Figure 3-13 : étapes de réalisation de
l'interface
3-9-2 Outil guide
Le GUIDE est un outil graphique qui regroupe tout ce dont
le programmeur à besoin pour créer une interface graphique de
façon intuitive. [15]

Figure 3-14 : outil guide
Le placement des objets est réalisé par
sélection dans la boite à outils, mise en place et mise à
dimension à la souris. Un double-clique sur chaque objet permet de faire
apparaître un menu avec les propriétés de cet objet. Leur
modification et l'aperçu de ces modifications sont immédiats. Au
final, le code est généré automatiquement et l'interface
est enregistrée sous deux fichiers portant le même nom mais dont
les deux extensions sont .fig et
.m. Le premier contient la définition des
objets graphiques. Le second contient les lignes de code qui assurent le
fonctionnement de l'interface graphique.
3-9-3 Programmation du guide
Nous avons gardé à l'esprit sept principes
qui ont guidé la création de l'interface :
- L'utilisateur doit avoir le contrôle:
l`utilisateur doit sentir que c`est lui qui a l`initiative d`une
action.
- Etre direct: les différentes fonctions sont
visuellement intuitives.
- La Cohérence: l`utilisateur ne doit pas passer
beaucoup de temps à prendre connaissance notre application.
- L'esthétique:
- La simplicité: l'application est facile
d`apprentissage et d`usage. L'utilisateur a l`accès à toutes les
fonctions et informations de l`application, et la manipulation reste aussi
simple que possible.
Nous avons testé plusieurs fois l'application avec
différents intrants.
3-10 Conclusion
Dans ce chapitre, nous avons présenté
les formulations élémentaires et globales utilisées dans
cette application pour l'analyse statique et modale de calcul des pylônes
par la méthode des éléments finis. La formulation
élémentaire consiste à déterminer une fonction
d'interpolation qui représente la variation des déplacements
à l'intérieur de l'élément en termes de
déplacements nodaux puis à calculer, pour chaque
élément, ses caractéristiques élémentaires :
matrice de rigidité, matrice de masse et vecteur des forces. La
formulation globale consiste à rechercher, pour la structure
complète, l'expression matricielle de l'énergie potentielle en
fonction des déplacements inconnus en tous les noeuds de la structure.
Ceci nécessite l'assemblage des caractéristiques
élémentaires (matrices de rigidité, de masses, vecteurs
forces) de tous les éléments. Ainsi, à partir des
formulations énergétiques, nous aboutissons à un
système d'équations linéaires qui régissent le
comportement statique et modal de la structure.
chapitre-4 Application à un pylône de 36
mètres
4-1 Introduction
Un exemple de calcul statique et modal est
traité pour le calcul des efforts internes, du déplacement en
tête et des modes propres. Les résultats obtenus sont
confrontés à ceux de la méthode analytique et au logiciel
ROBOT MILLENIUM 2010. Nous traitons donc un pylône auto stable de 36
mètres. Toutes les données sont entrées sur l'interface
ci-contre :
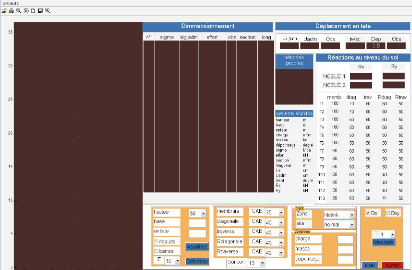
Figure 4-1 : interface de l'application Les
données suivantes sont entrées :
- Base : 5 m
- Entête : 1m
- Charge entête : 20 m2
- Masse de l'antenne : 900 kg
- Type de site : protégé -
Zone : Yaoundé
- Dépointage : 0.8°
- Direction du vent : Dx
4-2 Affichage (maillage) du pylône
Tout d'abord, il faut sélectionner la hauteur
du pylône à construire dans << hauteur >>, entrer les
sections de << base >> et d' << entête >>. Il est
aussi possible de visualiser les numéros des noeuds et des barres. A ce
stade, il faut cliquer sur << visualiser >> pour voir s'afficher le
pylône à l'extrême gauche.
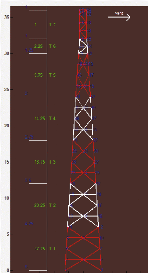
Figure 4-2 : maillage du pylône
Sur le schéma, on lit directement les surfaces
totales des différents tronçons, les longueurs des
tronçons etc.
Un clic sur l'onglet << déformée
>> affiche la déformée du pylône selon
l'échelle choisie. Cette touche fonctionne seulement si la charge en
tête, la masse du pylône sont remplies.
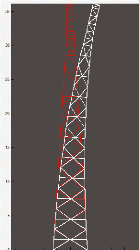
Figure 4-3 : pylône déformé à
l'échelle 10
Le pylône initial est en rouge et celui
déformé en blanc.
4-3 Choix de la région et de l'antenne
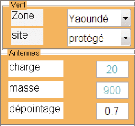
Figure 4-4 : choix de la région et antennes
Après avoir choisi la zone et le type de site, il
faut entrer la charge en tête en mètres carrés, la masse en
kg et le dépointage en degré ; par défaut, le
dépointage est égal à 0.5°.
4-4 Choix des cornières
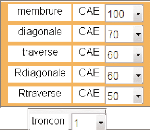
Pour chaque tronçon, choisir les
cornières de la membrure, la diagonale, la traverse, le raidisseur-
diagonale et le raidisseur-traverse correspondant à au tronçon
désiré. La saisie est interactive puisque l'on visualise
directement les changements sur le tableau suivant :
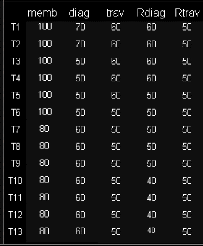
Figure 4-5 : listing des cornières
4-5 Affichage des résultats
Figure 4-6 : affichage des résultats
Il faut préciser la direction du vent, choisir le
tronçon dont on veut afficher les résultats et un clic sur
<< résultats ». On observe ceci :


Figure 4-7 : déplacement en tête du
pylône
- Ux : déplacement horizontal de l'en tête
du pylône en centimètres, soit 19.10 cm,
- Uadm : déplacement limite imposé par [4]
et [11], il vaut h/200 soit 36 m /200 = 18 cm où h est la hauteur du
pylône
- Obs : zone de texte à deux états : si
Ux est inférieur à Uadm, le message affiché est <<
bon », dans le cas contraire, la réponse est << non »,
on constate bien que 19.10 est supérieure à 18.
- Twist : rotation due à la torsion des membrures
à l'en tête du pylône en degré,
- Dép désigne le dépointage
c'est-à-dire la rotation maximale en tête du pylône, il est
fourni dans le cahier de charge et est compris entre 0.3° et
1°,
- Obs fonctionne exactement comme celui décrit
précédement.
4-6 Périodes propres du pylône : zone de
texte


Figure 4-8 : Affichage périodes propres Ce sont
les périodes de vibration propre du pylône en secondes
4-7 Vérification du dimensionnement

Figure 4-9 : résultat dimensionnement

A chaque fois que la contrainte est inférieure
à la contrainte admissible, un message << bon >> apparait
dans la colonne << obs >> et << non >> dans le cas
contraire. Un message apparait aussi en rouge ou en vert selon que le
tronçon est incorrect ou correct.
4-8 Réactions à la base du pylone

Figure 4-10 réactions au niveau de la base du
pylône
Ce sont les réactions au niveau du sol
:
Rx désigne la réaction horizontale et Ry la
réaction verticale ; le noeud 1 désignant celui de gauche et le
noeud 2 celui de droite.
4-9 Confrontation avec la méthode
analytique
Une fois les résultats obtenus, nous passons au
niveau de la vérification qui consiste à confronter
simultanément nos résultats et ceux obtenus par la méthode
analytique, ensuite positionner nos résultats par rapport obtenus par
ROBOT MILLENIUM (annexe 4)
4-9-1 Principe de la méthode analytique
Cette méthode est basée sur le fait que
chaque noeud isolé doit être en équilibre. Sur chaque
barre, l'effort est nécessairement sur l'axe reliant les deux
articulations. Par le fait même, les forces sur un noeud sont toujours
concourantes. Donc, les efforts se rencontrent sur le noeud. En plus, on a vu
que l'on ne peut pas charger un treillis sur une barre mais plutôt sur le
noeud donc, on en arrive à un système de forces concourantes
autour des noeuds [1].
Rapportons le plan du treillis à un repère
orthonormé (O,x,y). Soit A un noeud relié à Ai par des
barres Bi = AAi. Désignons par :
- F(x,y) la résultante des forces
extérieures appliquées au noeud A.
:::;
- cIi l'angle polaire du vecteur AA i
par rapport à (Ox),
- Ni l'effort normal dans la barre, Ni est
supérieure à zéro si la barre travaille en traction et
inférieure à zéro si la barre travaille en
compression

y
Ai
Ni
~i
Bi
A
x
Si ^:;i est la force
exercée par la barre Bi sur le noeud A, on constate que la
mesure
algébrique sur l'axe i:;
i est Ni en intensité et en signe. L'équilibre des forces
appliquées s'écrit :
~:;i + ~
U::;i = :; . ( 4-1)
En décomposant sur les deux axes, on
obtient
X + Ni.cos (cDi) =0 (4-2)
Y + Ni.sin (cDi) =0 (4-3)
On répète cette opération sur chaque
noeud de la structure.
On obtient les réactions en projetant
verticalement les efforts des barres reliés à la base du
pylône.
Pour avoir la flèche en tête du
pylône, on utilise le théorème de Pasternak qui stipule que
le déplacement en un noeud d'une structure isostatique à treillis
est donné par l'expression suivante :
- N désigne la sollicitation intérieure
(effort normal) de la structure
- ^~0 j , la sollicitatation due à une force
unité placée au point d'application de la charge dans la
direction de celle-ci.
Dans le cas de notre pylône, on a vu que les
effforts normaux sont constans le long d'une barre, d'où l'expression
devient :

(4 5)
Aj =
4-9-1-1 Comparaison des résultats
Les calculs effectués par la méthode
analytique sont exacts. Nous nous proposons de calculer l'erreur moyenne
commise par les deux méthodes numériques (calculs faits par GENIE
et ROBOT MILLENIUM) ensuite de les comparer à la méthode
analytique, ceci a pour but non seulement de vérifier la justesse de nos
résultats, mais aussi de les positionner par rapport au logiciel
commercial le plus utilisé.
4-9-2 Calcul des erreurs moyennes L'erreur moyenne est
calculée ainsi :
em = erreur moyenne,
ei = erreur relative entre la grandeur calculée
numériquement (GENIE, ROBOT MILLENNIUM) et la grandeur calculée
analytiquement.
N = nombre de barres, de noeuds ou de réactions
d'appui.
4-9-2-1 Calcul des réactions au sol
Tableau 4-1 : résultats des réactions
|
Rx (kN)
|
Erreur
relative
|
Ry (kN)
|
Erreur relative
|
|
Noeud 1
|
Calcul par
la
méthode
analytique
|
-30.14
|
|
-334.18
|
|
|
Calcul par GENIE
|
-30.12
|
0.06%
|
-334.15
|
0.01%
|
|
Calcul par robot
|
-30.49
|
1.16%
|
-333.79
|
0.12%
|
|
Noeud 2
|
Calcul par
la
méthode
analytique
|
-31.36
|
|
345.90
|
|
|
Calcul par GENIE
|
-31.36
|
0%
|
345.9
|
0%
|
|
Calcul par robot
|
-31.01
|
1.12%
|
345.79
|
0.3%
|
4-9-2-2 Calcul des contraintes
Tableau 4-2 : résultat du calcul des contraintes
|
Barre
|
Méthode
analytique
|
Calcul de
GENIE
|
Erreur
relative
|
Calcul de
ROBOT
|
Erreur
relative
|
|
1
|
171.38
|
171.37
|
0.01%
|
171.47
|
0.05%
|
|
2
|
11.93
|
11.91
|
0.17%
|
12.41
|
4.02%
|
|
3
|
-12.55
|
-12.56
|
0.08%
|
-12.12
|
3.43%
|
|
4
|
-177.34
|
-177.34
|
0.00%
|
-177.82
|
0.27%
|
|
5
|
-1.86
|
-1.85
|
0.54%
|
-1.85
|
0.54%
|
|
6
|
171.36
|
171.37
|
0.01%
|
171.47
|
0.06%
|
|
7
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
8
|
-11.59
|
-12.00
|
3.54%
|
-11.59
|
0.00%
|
|
9
|
11.38
|
11.39
|
0.09%
|
11.86
|
4.22%
|
|
10
|
-177.35
|
-177.34
|
0.01%
|
-177.82
|
0.27%
|
|
11
|
165.17
|
165.15
|
0.01%
|
165.45
|
0.17%
|
|
12
|
11.33
|
11.32
|
0.09%
|
10.89
|
3.88%
|
|
13
|
-12.36
|
-12.35
|
0.08%
|
-12.86
|
4.05%
|
|
14
|
-171.12
|
-171.00
|
0.07%
|
-171.2
|
0.05%
|
|
15
|
-1.85
|
-1.85
|
0.00%
|
-1.85
|
0.00%
|
|
16
|
165.2
|
165.15
|
0.03%
|
165.45
|
0.15%
|
|
17
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
18
|
-11.85
|
-11.81
|
0.34%
|
-12.3
|
3.80%
|
|
19
|
10.84
|
10.84
|
0.00%
|
10.43
|
3.78%
|
|
20
|
-171.2
|
-171.00
|
0.12%
|
-171.2
|
0.00%
|
Tableau 4-3 : résultat du calcul des contraintes
(suite)
|
Barre
|
Méthode
analytique
|
Calcul de
GENIE
|
Erreur relative
|
Calcul de
ROBOT
|
Erreur relative
|
|
21
|
158.66
|
158.66
|
0.00%
|
158.65
|
0.01%
|
|
22
|
11.12
|
11.11
|
0.09%
|
11.7
|
5.22%
|
|
23
|
-11.82
|
-11.84
|
0.17%
|
-11.4
|
3.55%
|
|
24
|
-164.6
|
-164.59
|
0.01%
|
-165.01
|
0.25%
|
|
25
|
-1.94
|
-1.94
|
0.00%
|
-1.85
|
4.64%
|
|
26
|
158.66
|
158.66
|
0.00%
|
158.65
|
0.01%
|
|
27
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
28
|
-11.35
|
-11.30
|
0.44%
|
-10.93
|
3.70%
|
|
29
|
10.63
|
10.62
|
0.09%
|
11.21
|
5.46%
|
|
30
|
-164.6
|
-164.59
|
0.01%
|
-165.01
|
0.25%
|
|
31
|
152.12
|
152.10
|
0.01%
|
152.29
|
0.11%
|
|
32
|
10.54
|
10.55
|
0.09%
|
10.2
|
3.23%
|
|
33
|
-11.7
|
-11.69
|
0.09%
|
-12.35
|
5.56%
|
|
34
|
-157.9
|
-157.89
|
0.01%
|
-157.92
|
0.01%
|
|
35
|
-1.94
|
-1.94
|
0.00%
|
-1.93
|
0.52%
|
|
36
|
152.12
|
152.10
|
0.01%
|
152.29
|
0.11%
|
|
37
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
38
|
-11.19
|
-11.18
|
0.09%
|
-11.82
|
5.63%
|
|
39
|
10.09
|
10.11
|
0.20%
|
9.79
|
2.97%
|
|
40
|
-157.9
|
-157.89
|
0.01%
|
-157.92
|
0.01%
|
Tableau 4-4 : résultat du calcul des contraintes
(suite)
|
Barre
|
Méthode
analytique
|
Calcul de
GENIE
|
Erreur relative
|
Calcul de
ROBOT
|
Erreur relative
|
|
41
|
145.17
|
145.16
|
0.01%
|
144.94
|
0.16%
|
|
42
|
20.7
|
20.71
|
0.05%
|
21.88
|
5.70%
|
|
43
|
-22.05
|
-22.04
|
0.05%
|
-21.33
|
3.27%
|
|
44
|
-151.06
|
-151.07
|
0.01%
|
-151.3
|
0.16%
|
|
45
|
-1.74
|
-1.73
|
0.57%
|
-1.93
|
10.92%
|
|
46
|
145.17
|
145.16
|
0.01%
|
144.94
|
0.16%
|
|
47
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
48
|
-21.42
|
-21.40
|
0.09%
|
-20.55
|
4.06%
|
|
49
|
20.14
|
20.15
|
0.05%
|
21.07
|
4.62%
|
|
50
|
-151.06
|
-151.07
|
0.01%
|
-151.3
|
0.16%
|
|
51
|
137.9
|
137.89
|
0.01%
|
138
|
0.07%
|
|
52
|
20.45
|
20.47
|
0.10%
|
19.31
|
5.57%
|
|
53
|
-22.74
|
-22.72
|
0.09%
|
-23.76
|
4.49%
|
|
54
|
-143.62
|
-143.63
|
0.01%
|
-143.5
|
0.08%
|
|
55
|
-1.73
|
-1.73
|
0.00%
|
-1.72
|
0.58%
|
|
56
|
137.9
|
137.89
|
0.01%
|
138
|
0.07%
|
|
57
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
58
|
-22.29
|
-22.28
|
0.04%
|
-23.25
|
4.31%
|
|
59
|
20.14
|
20.16
|
0.10%
|
19.07
|
5.31%
|
|
60
|
-143.62
|
-143.63
|
0.01%
|
-143.5
|
0.08%
|
Tableau 4-5 : résultat du calcul des contraintes
(suite)
|
Barre
|
Méthode
analytique
|
Calcul de
GENIE
|
Erreur relative
|
Calcul de
ROBOT
|
Erreur relative
|
|
61
|
129.78
|
129.79
|
0.01%
|
129.49
|
0.22%
|
|
62
|
21.64
|
21.63
|
0.05%
|
22.74
|
5.08%
|
|
63
|
-23.1
|
-23.11
|
0.04%
|
-21.86
|
5.37%
|
|
64
|
-135.65
|
-135.64
|
0.01%
|
-135.92
|
0.20%
|
|
65
|
-1.69
|
-1.69
|
0.00%
|
-1.72
|
1.78%
|
|
66
|
129.78
|
129.79
|
0.01%
|
129.49
|
0.22%
|
|
67
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
68
|
-23.06
|
-23.08
|
0.09%
|
-21.88
|
5.12%
|
|
69
|
21.8
|
21.70
|
0.46%
|
22.7
|
4.13%
|
|
70
|
-135.66
|
-135.64
|
0.01%
|
-135.92
|
0.19%
|
|
71
|
120.78
|
120.78
|
0.00%
|
120.97
|
0.16%
|
|
72
|
22.76
|
22.78
|
0.09%
|
21.36
|
6.15%
|
|
73
|
-25.43
|
-25.42
|
0.04%
|
-26.59
|
4.56%
|
|
74
|
-126.4
|
-126.39
|
0.01%
|
-126.22
|
0.14%
|
|
75
|
-1.68
|
-1.69
|
0.60%
|
-1.67
|
0.60%
|
|
76
|
120.8
|
120.78
|
0.02%
|
120.97
|
0.14%
|
|
77
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
78
|
-26.02
|
-26.01
|
0.04%
|
-27.13
|
4.27%
|
|
79
|
23.51
|
23.53
|
0.09%
|
22.2
|
5.57%
|
|
80
|
-126.35
|
-126.39
|
0.03%
|
-126.22
|
0.10%
|
Tableau 4-6 : résultat du calcul des contraintes
(suite)
|
Barre
|
Méthode
analytique
|
Calcul de
GENIE
|
Erreur relative
|
Calcul de
ROBOT
|
Erreur relative
|
|
81
|
109.9
|
109.80
|
0.09%
|
109.43
|
0.43%
|
|
82
|
26.67
|
26.68
|
0.04%
|
28.08
|
5.29%
|
|
83
|
-28.5
|
-28.40
|
0.35%
|
-28.79
|
1.02%
|
|
84
|
-115.58
|
-115.57
|
0.01%
|
-115.97
|
0.34%
|
|
85
|
-1.65
|
-1.60
|
3.03%
|
-1.59
|
3.64%
|
|
86
|
109.78
|
109.80
|
0.02%
|
109.49
|
0.26%
|
|
87
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
88
|
-30.47
|
-30.47
|
0.00%
|
-30.48
|
0.03%
|
|
89
|
28.85
|
28.84
|
0.03%
|
28.55
|
1.04%
|
|
90
|
-115.58
|
-115.57
|
0.01%
|
-115.97
|
0.34%
|
|
91
|
95.82
|
95.83
|
0.01%
|
94.31
|
1.58%
|
|
92
|
32.92
|
32.94
|
0.06%
|
32.74
|
0.55%
|
|
93
|
-36.38
|
-36.36
|
0.05%
|
-33.48
|
7.97%
|
|
94
|
-101.23
|
-101.20
|
0.03%
|
-102.71
|
1.46%
|
|
95
|
-1.65
|
-1.60
|
3.03%
|
-1.66
|
0.61%
|
|
96
|
95.8
|
95.83
|
0.03%
|
95.56
|
0.25%
|
|
97
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
98
|
-41.56
|
-41.54
|
0.05%
|
-41.55
|
0.02%
|
|
99
|
38.3
|
38.28
|
0.05%
|
38.29
|
0.03%
|
|
100
|
-101.23
|
-101.20
|
0.03%
|
-102.71
|
1.46%
|
Tableau 4-7 : résultat du calcul des contraintes
(suite)
|
Barre
|
Méthode
analytique
|
Calcul de
GENIE
|
Erreur relative
|
Calcul de
ROBOT
|
Erreur relative
|
|
101
|
-16.94
|
-16.93
|
0.06%
|
-16.63
|
1.83%
|
|
102
|
78.8
|
78.79
|
0.01%
|
78.8
|
0.00%
|
|
103
|
46
|
46.10
|
0.22%
|
46.05
|
0.11%
|
|
104
|
-92.32
|
-92.35
|
0.03%
|
-92.33
|
0.01%
|
|
105
|
-1.48
|
-1.49
|
0.68%
|
-1.52
|
2.70%
|
|
106
|
78.8
|
78.79
|
0.01%
|
78.8
|
0.00%
|
|
107
|
-51.98
|
-51.99
|
0.02%
|
-51.96
|
0.04%
|
|
108
|
-75.99
|
-75.99
|
0.00%
|
-76
|
0.01%
|
|
109
|
55.91
|
55.93
|
0.04%
|
55.85
|
0.11%
|
|
110
|
108.86
|
108.84
|
0.02%
|
108.72
|
0.13%
|
|
111
|
-79
|
-79.00
|
0.00%
|
-79.2
|
0.25%
|
|
112
|
-84.97
|
-84.99
|
0.02%
|
-89.22
|
5.00%
|
|
113
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
114
|
42.76
|
42.79
|
0.07%
|
42.52
|
0.56%
|
|
115
|
77.25
|
77.22
|
0.04%
|
77.46
|
0.27%
|
|
116
|
-84.96
|
-84.99
|
0.04%
|
-89.22
|
5.01%
|
|
117
|
-1.69
|
-1.68
|
0.59%
|
-1.66
|
1.78%
|
|
118
|
42.69
|
42.79
|
0.23%
|
42.52
|
0.40%
|
|
119
|
-75.48
|
-75.45
|
0.04%
|
-75.71
|
0.30%
|
|
120
|
-20.42
|
-20.44
|
0.10%
|
-20.13
|
1.42%
|
Tableau 4-8 : résultat du calcul des contraintes
(fin)
|
Barre
|
Méthode
analytique
|
Calcul de
GENIE
|
Erreur relative
|
Calcul de
ROBOT
|
Erreur relative
|
|
121
|
0
|
0.00
|
0.00%
|
0
|
0.00%
|
|
122
|
-4.87
|
-4.77
|
0.00%
|
-4.89
|
2.52%
|
|
123
|
56.44
|
56.21
|
0.04%
|
59.58
|
5.96%
|
|
124
|
-20.55
|
-20.44
|
0.10%
|
-20.13
|
1.42%
|
|
125
|
-70.42
|
-70.26
|
0.01%
|
-70.21
|
0.06%
|
4-9-2-3 Calcul du déplacement en tête
Tableau 4-9: résultat du calcul des
déplacements
|
Methode
analytique
|
GENIE
|
Erre ur
relative
|
ROBOT
|
Erre ur
relative
|
|
19.21 cm
|
19.11 cm
|
0. 52%
|
19.40 cm
|
0.99%
|
Après avoir calculés toutes les grandeurs
par les trois méthodes, il nous reste à comparer les
résultats. Les comparaisons sont effectuées dans le tableau
suivant :
Tableau 4-10 : comparaison des résultats
|
réactions
|
contraintes
|
Déplacement en tête
|
|
GENIE
|
ROBOT
|
GENIE
|
ROBOT
|
GENIE
|
ROBOT
|
|
0.02%
|
0.61%
|
0.15%
|
1.76%
|
0.52%
|
0.99%
|
4-9-3 Conclusion
Les exemples présentés dans ce chapitre
ont permis d'évaluer la qualité des résultats de calcul
fournis par GENIE. Les résultats obtenus suite à l'analyse
statique ont été comparés à ceux calculés
par la méthode analytique et nous ont permis de nous positionner par
rapport au
logiciel de calcul en construction métallique
ROBOT MILLENIUM 2010.Dans l'ensemble des résultats, GENIE propose une
erreur relative inférieure à 1%. ROBOT MILLENIUM présente
une erreur relative supérieure à celle de GENIE. Cela place les
résultats de GENIE dans la marge acceptable. Le code GENIE sans disposer
de toutes les fonctionnalités de ROBOT MILLENIUM est tout de même
une alternative crédible de dimensionnement des pylônes
autostables.
Conclusion générale
GENIE, objet de ce travail, destiné au calcul
et à la simulation des efforts sur les pylônes constitue un
problème à caractère pluridisciplinaire nécessitant
de mettre en oeuvre des connaissances relevant de plusieurs domaines tels que
la méthode des éléments finis, les normes de
dimensionnement en construction métallique, le calcul numérique
et la programmation informatique. Dans un premier temps, nous avons
présenté la méthode des éléments finis
utilisée dans l'analyse élastostatique et modale des
pylônes construits par GENIE. Ces pylônes sont
discrétisés en barres avec une approximation basée sur la
méthode des déplacements. Ensuite, nous avons
présenté les exigences des normes Eurocode 3 et NV 65 relatives
à la construction des pylônes. Ces exigences sont
intégrées dans le code GENIE pour faciliter et automatiser le
calcul. Enfin, nous avons présenté une interface graphique qui a
été développé sur le logiciel matlab 2007b à
travers l'outil guide en utilisant sa librairie. Signalons que l'architecture
de GENIE assure une maintenance facile du code et permet d'ajouter de nouveaux
modules pour répondre aux besoins, en évolution permanente,
à la fois industriels et de recherche scientifique. Un exemple
d'application traité démontre la validité du code
réalisé dans le cadre de ce travail. Nous avons
procédé aux calculs statique et modal d'un pylône de 36
mètres. Les résultats obtenus ont été
approuvés par La méthode analytique et le logiciel ROBOT
MILLENIUM 2010.
Au terme de ce travail, il nous semble intéressant
d'envisager quelques perspectives :
° Extension des types de pylônes comme le
dimensionnement des pylônes tubulaires et les pylônes
tripodes,
° Nous pouvons aussi ajouter une fonction
économique qui va rechercher pour un pylône donné, les
cornières optimales,
° L'interface utilisateur basé sur le GUI
matlab pourrait être améliorée en ajoutant d'autres
fonctions graphiques (icônes) pour faciliter davantage les
opérations de post-traitement.
Bibliographie
[1] SERGES LAROZE, Mécanique des
structures.2, Toulouse - 2005, 191p.
[2] PIERRE THOMAS, Eléments finis
pour l'ingénieur, Paris -2006, 448 p.
[3] MANFRED GILLI, méthodes
numériques, Genève - 2006, 132 p.
[4] J. MOREL, calcul des structures selon
l'eurocode 3, Lyon - 2005, 331 p.
[5] Règles NV 65, Règles de
calcul définissant les effets de la neige et du vent sur les
constructions et annexes, Avril 2000, 224 p
[6] A SEGHIR, éléments finis
barres dans méthode d'éléments finis, BEJAIA-
2008, 3-11
[7] JC AMBA, cours d'éléments
finis, FGI, 2010
[8] PATRICK MARCHAND AND O. THOMAS HOLLAND,
Graphics and GUIs with MATLAB
[9] HAMRIT Fareh analyse des structures
discrètes par la méthode des éléments finis,
mémoire d'ingénieur université de M'sila ,158p.
[10] Direction de la
météorologie-République du Cameroun, «
unités climatiques et leurs caractéristiques, 2008
[11] avant projet détaillés de la
société CARTEL (compagnie africaine de réalisation en
télécommunication)
[12] site de recherche :
http://fr.wikipedia.org/wiki/Orange
%28entreprise%29 date de visite:20/11/2011
[13] les relais GSM:
http://www.juliendelmas.com,
date de visite: 30/11/2011
[14] mer télécom :
http://www.mer-group.com/?CategoryID=549&ArticleID=220:
date de visite : 30/11/2011
[15] interfaces graphiques :
http://briot-jerome.developpez.com/matlab/tutoriels/introductionprogrammation-interfaces-graphiques/
date de visite: 30/11/2011
Annexes
Annexe 1 : quelques éléments d'un site de
télécommunication Annexe 1.a : lecture des azimuts

Annexe 1.b : BTS

Annexe 1.c : Baie

Annexe 2 : quelques données de la norme NV 65
Annexe 2-a: coefficient de réduction

Annexe 2-b : coefficient de réponse

Annexe 2-c : coefficient de pulsation

Annexe 3 : Fonctions essentielles
utilisées dans le code
Annexe 3-a : coordonnées et
connectivités entre les noeuds.
function [t,p]=schema36(B,H) %
%cette fonction dessine le pylone %B: longueur des bases
%H:hauteur du pylone
%t:table de connectivité %p:coordonnées des
noeuds %tsopgo clovis, faculte de genie industriel
%
[t,p]=type4(B(1),B(2),H(1));
for i=2:7
if i<6
[T,P]=type4(B(i),B(i+1),H(i)); elseif i==6
[T,P]=type5(B(i),B(i+1),H(i));
else
[T,P]=type6(B(i),B(i+1),H(i));
end
T=T+size(p,1)-2;
P=P(3:size(P,1),:);
P(:,2)=P(:,2)+sum(H(1:i-1));
t=[t;T]; p=[p;P];
end
return
Annexe 3-b: localisation de la matrice
élémentaire dans la matrice globale
function L = Localise(t)
%calcul de la localisation de la matrice elementaire % dans la
matrice globale
% t : table de connectivités de l'element % L : table de
loacalisation
%
% tsopgo clovis,faculte de genie industriel
nne = length(t);
for i= 1:nne
L([2*i1 2*i]) = [2*t(i)1 2*t(i)];
end
return
annexe 3-c: longueurs et cosines directeurs des
barres
function [ds,c,s] = EltLen(XY)
%
% Calcul de la longueur, du cos et du sin de la matrice de
rotation pour un
% element barre à deux noeuds (x1,y1) (x2,y2)
% c : cosinus de l'angle
% s : sinus de l'angle
% XY: cordonnées des noeuds XY = [x1,y1; x2,y2]
%
% tsopgo clovis,faculte de genie industriel
dx = XY(2,1) - XY(1,1);
dy = XY(2,2) - XY(1,2);
ds = sqrt(dx^2 + dy^2);
c = dx/ds; s = dy/ds; return
annexe 3-d: élimination des noeuds
bloqués
function A = DelDOFs(A,L)
% A = DelDOFs(A,L)
%
% A : matrice globale après assemblage
% L : liste des degrés de liberté à
éliminer % tsopgo clovis faculté de genie industriel
L = sort(L); % tri de la liste des DDL
n = length(L); % longueur de L
if (size(A,2) == 1) % cas d'un vecteur
for i = n:-1:1 % parcourir L à partir du plus grand
indice
A(L(i)) =[] ; % suppression de la composante associée au
DDL
courant
end
else % cas d'une matrice
for i = n:-1:1
A(L(i),:) =[] ; % suppression de la ligne L(i)
A(:,L(i)) =[] ; % suppression de la colonne L(i)
end end return
annexe 3-e : ajout des noeuds
bloqués
function U = AddDOFs(U,L)
%
% U = K \ F : FE solution
% L : Table de localisation des noeuds d'appuis
%
%tsopgo clovis faculté de génie industriel
[m,n] = size(L);
L = reshape(L,m*n,1); L = L(find(L));
L = sort(L);
n = length(L);
for i = 1:n
U = AddToVect(U,L(i),0);
end
U = U';
return
annexe 3-f : calcul des efforts
normaux
function [F,R] = TrussForces(t,p,A,E,U)
% F : forces axiales dans les barres
% R : forces aux niveaux des noeuds = réactions dans le
cas d'appuis % t : table de connectivités des éléments
% p : table des coordonnées des noeuds
% A : sections des éléments
% E : modules d'élasticité
% U : solution en déplacement
%
% tsopgo clovis, faculte de genie industriel
net = size(t,1); % nombre d'éléments total
nnt = size(p,1); % nombre de noeuds total
R = zeros(2*nnt,1); % Forces aux noeuds
for ie = 1:net % boucle sur les éléments
L = localise(t(ie,:)); % table de localisation
ke = truss2dKe(p(t(ie,:),:),A(ie),E); % matrice
élémentaire
ue = U(L); % déplacements des noeuds
fe = ke*ue; % forces élémentaires dans (oxy)
R(L) = R(L) + fe; % tous les éléments liés
au noeud
[L,c,s] = EltLen(p(t(ie,:),:)); % les cosinus directeurs
F(ie,:) = -( c*fe(1) + s*fe(2) ); % rotation au repère
local
end % fin de boucle
return
annexe 3-g : maillage du pylône
function plotmesh(haut,base,entete,EltLabels,NodeLabels)
%
% cette fonction dessine le pylone
% haut: hauteur du pylone
% base: longueur de la base
% entete: longueur de l'entete
% NodeLabels : vaut true pour afficher les
éléments
% EltLabels : vaut true pour afficher les noeuds
% color : couleur des lignes
% % %tsopgo clovis, faculte de genie industriel
%
axis equal
[hauteur, D,d,H,B]=geom(haut,base,entete);
[t,p]=schema(B,H); Net = size(t,1); for ie = 1:Net
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','r','linewidth',2)
if(EltLabels)
x = mean(XY(:,1));
y = mean(XY(:,2));
axis equal text(x,y,num2str(ie),'color','g')
end
end
Np = size(p,1); if(NodeLabels) for i=1:Np
text(p(i,1),p(i,2),num2str(i),'color','b')
end
end
if hauteur ==36; for ie = 21:40
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 61:80
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 101:108
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
elseif hauteur ==54;
for ie = 1:26
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 53:72
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 93:112
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 133:152
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 173:180
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
elseif hauteur ==72;
for ie = 27:52
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 73:92
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 113:132
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 153:172
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 193:212
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
for ie = 234:241
XY = p(t(ie,:),:);
X = [XY(:,1)];
Y = [XY(:,2)]; line(X,Y,'color','w','linewidth',2)
end
end
X=[-D -D];
Y=[-0.5 sum(H)+0.5];
line(X,Y,'color','w')
h=[0 H];
B = num2str(B,'%10.2f');
B=str2num(B);
x=[-D -1.5*D];
y=[0 0];
line(x,y,'color','w')
text(-1.6*D,0.45,num2str(B(1)),'color','b')
z1=[0.5*D+1 0.5*D+4]; z2=[sum(h)-1 sum(h)-1]; t1=[0.5*D+3.5
0.5*D+4]; t2=[sum(h)-1.5 sum(h)-1]; t3=[sum(h)-0.5 sum(h)-1];
line(z1,z2,'color','w','linewidth',2)
line(t1,t2,'color','w','linewidth',2)
line(t1,t3,'color','w','linewidth',2)
text(0.5*D+2,sum(h)-0.4,'vent','color','w')
for i= 1:length(H)
s=0.5*(B(i+1)+B(i))*H(i); y=[sum(H(1:i)) sum(H(1:i))];
line(x,y,'color','w')
text(-D+0.3,sum(h(1:i))+0.5*h(i+1),'T','color','g')
text(-D+0.9,sum(h(1:i))+0.5*h(i+1),num2str(i),'color','g')
text(-1.35*D,sum(h(1:i))+0.5*h(i+1),num2str(s),'color','g')
text(-1.6*D,sum(H(1:i))+0.45,num2str(B(i+1)),'color','b')
end
return
annexe 3-h: matrice de rigidité
élémentaire
function [ke,L] = truss2dKe(XY,A,E)
%
% Calcul de la matrice elementaire pour un
% element barre à deux noeuds (x1,y1) (x2,y2) % A :
section de l'element
% E : module d'élasticité
% XY: cordonnées des noeuds XY = [x1,y1; x2,y2] %
L:longueur de la barre
%tsopgo clovis, faculte de genie industriel
[L,c,s] = EltLen(XY); % longueur et orientation de
l'élément
cc = c*c; % cos(angle)^2
cs = c*s; % cos(angle)*sin(angle)
ss = s*s; % sin(angle)^2
ke = (A*E/L) * [ cc cs -cc -cs % matrice
élémentaire Ke
cs ss -cs -ss -cc -cs cc cs cs ss cs ss
];
return
Annexe 3- i : programme principal
function
[P,R,sigma,Ux,Umax,Rx1,Ry1,Rx2,Ry2,T,U,t,p,A,ba,Long,fy,obs,alpha] =
truss2dKM(haut,base,entete,q,sa,masse,cornieres,ks,direct)
% haut: hauteur du pylone
% base: longueur de la base
% entete: longueur de l'entete % q:pression à 10
mètres du sol % sa: charge en tete du pylone % masse: masse des
antennes
% cornières: matrice des cornières à
utiliser
% ks: coefficient de site % direct:direction du vent
% P:vecteur des efforts normaux % R:réactions au niveau du
sol
% sigma: vecteur des contraintes
% Ux: valeur de la flèche en tete du pylone
% Umax: déplacement maximal en tete du pylone
% RX, RY: valeurs des réactions au niveau du sol
% T: périodes propres
% U: vecteur déplacement % t : table de
connectivités des éléments
% p : table des coordonées des noeuds
% A : sections des éléments (des barres)
% ba :numéros des barres
% long :longueur des barres % fy :contraintes maximales
% obs:vecteur à deux états: "oui" si sigma < fy
et "non" sinon
% alpha: angle de rotation en tete
%tsopgo clovis, faculte de genie industriel
%
clc % effacer tout le contenu de la
fenetre de commande
[B,Al,A,si,sp,dens,E,G,H,Fv,Fp,t,p,iv,fy,Iw]=traitement(haut,base,entete,q,co
rnieres,ks,direct);
if direct==0 %direction du vent qui vaut 0 pour
le vent
Fv=Fv/1.41; % diagonal et 1 pour le vent normal
end %fin de la boucle
qa=1.3*2.5*q*sa*(sum(H)+16)/(sum(H)+58); % frce du vent dur les
antennes
net = size(t,1); %nombre de barres
nnt = 2*size(p,1); % nombre de noeuds, 2 signifie le
nombre de degré de liberté
K = sparse(nnt,nnt); % initialisation des matrices de
rigidité, d'inertie, et des forces
Kw = zeros(nnt,nnt); % par des matrices creuses nulles
M = sparse(nnt,nnt); FV = sparse(nnt,1); FP = sparse(nnt,1);
Mw = sparse(nnt,1);
Fp=2*Fp; % prise en compte des barrres
latérales
FV(end -3) = FV(end-3)+0.5*qa; %ajout du poids des antennes
Long=zeros(net,1); %initialisation des longueurs des
barres
for i = 1:net %début de boucle sur les
éléments
ti = t(i,:); %table de connectivité et de
Li = localise(ti); %localisation de l'élément
courant
[Ke,l] = truss2dKe(p(ti,:),A(i),E);%matrice de rigidité
élémentaire kw=((81e+9)*Iw(i)/l)*[1 0 -1 0;... %matrice de
rigidité élémentaire 0 0 0 0;-1 0 1 0;0 0 0 0]; %en
torsion
Long(i)=l;
Me = truss2dMe(p(ti,:),A(i),dens);%matrice masse
élémentaire fe=Fv(i)*l*[0.5;0;0.5;0];
Fe=-Fp(i)*[0;0.5;0;0.5];
|
K(Li,Li)
|
=
|
K(Li,Li) +
|
Ke;
|
|
Kw(Li,Li)
|
=
|
Kw(Li,Li)
|
+ kw;
|
|
M(Li,Li)
|
=
|
M(Li,Li) +
|
Me;
|
%assemblage de la fonction K %assemblage de la matrice kw
%assemblage de la matrice M
FV(Li) = FV(Li) + fe; %assemblage de la matrice FV
% FP(Li) = FP(Li) + Fe; %assemblage de la matrice FP
end %fin de la boucle
Long = num2str(Long,'%10.2f'); %choix du format d'affichage
Long=str2num(Long); %des longueurs
Mw(end-2)= 0.1*qa; %valeur du moment en tete
poids=masse*9.81; %poids des antennes
nul=1:4; %noeuds encastrés
K = DelDOFs(K,nul); %application
M = DelDOFs(M,nul); %des
FV = DelDOFs(FV,nul); %conditions
Mw = DelDOFs(Mw,nul); %aux
Kw = DelDOFs(Kw,nul); %limites
[y,kk]=chol(K); %décomposition
[yw,kk]=chol(Kw); %de cholesky
angle=yw'\Mw; %angle de
angle=yw\angle; %rotation
alpha= angle(end2)*180/3.14; %en tete du pylone
alpha = num2str(alpha,'%10.2f'); %normaux
alpha=str2num(alpha);
x=y'\FV; %calcul de
U=y\x; %la solution
U = AddDOFs(U,nul); %ajout des DDl des noeuds encastrés
Ux=100*U(end-1); %calcul de la flèche en tete
Ux = num2str(Ux,'%10.2f');
Ux=str2num(Ux);
Umax=sum(H)/2; %déplacement maximal
FP(end)=FP(end)-0.5*poids;
FP(end-2)=FP(end-2)-0.5*poids;
FP = DelDOFs(FP,nul); %conditions aux limites
U1=y'\(1.33*FP+1.5*FV);
U1=y\U1;
U1 = AddDOFs(U1,nul); % Ajouter les DDL des noeuds
encastré
[phi, omega2] = eigs(K,M); % modes propres
omega = sqrt(diag(omega2)); % pulsations
T = 2*pi./sort(omega); % périodes propres par ordre
croissant
T = num2str(T,3); % et choix du format d'affichage
[P,R] = TrussForces(t,p,A,E,U1); %calcul
sigma=(1e-6)*P./A %des éfforts
sigma = num2str(sigma,'%10.2f'); %normaux
sigma=str2num(sigma); %des contraintes
ba=1:length(t(:,1));
Rx1=R(1)/1000; %des réactions
Rx2=R(3)/1000; %et choix du format
Ry1=R(2)/1000; %d'affichage
Ry2=R(4)/1000;
Rx1 = num2str(Rx1,'%10.2f'); Rx1=str2num(Rx1);
Rx2 = num2str(Rx2,'%10.2f'); Rx2=str2num(Rx2);
Ry1 = num2str(Ry1,'%10.2f'); Ry1=str2num(Ry1);
Ry2 = num2str(Ry2,'%10.2f'); Ry2=str2num(Ry2);
%%%%% DIMMENSIONNEMENT %%%%%%
lam=Long./iv; %calcul de lamda
lam1=93.9*sqrt(235./fy); %de lamda 1
lba=lam./lam1; %de lamda barre
fi=0.5*(1+0.49*(lba-0.2)+lba.*lba); %de phi
ki=fi+sqrt(fi.*fi-lba.*lba); %de ki
ki=1./ki; %et
simax=ki.*fy./1.1; %de sigma max
for i=1:net % boucle de
if (lba(i)>0.2 && sigma(i)<=0)
%vérification
fy(i)= simax(i); %des contraintes
end % fin
end % de la boucle
%%%%% FIN DU DIMENSIONNEMENT %%%%
P=P/1000; %conversion de la force en kN
P = num2str(P,'%10.2f'); %choix du format d'affichage
P=str2num(P); %de l'effort
fy = num2str(fy,'%10.2f'); %et de
fy=str2num(fy); %l'effort maximal
obs=100*ones(net,1); %affichage
sigma=troncon(sigma,H); %de la contrainte
P=troncon(P,H); %de l'effort normal
A=A*1e+6;
A=troncon(A,H); %de la section
ba=troncon(ba,H); %des numéros des barres
Long=troncon(Long,H); %des longueurs
fy=troncon(fy,H); %de la contrainte maximale
obs=troncon(obs,H); %et de l'observation en fonction de la
hauteur
return %fin de la fonction

Annexe 4 : pylône dans robot
millénium
Annexe 4-a : vue en élévation du
pylône (numéro des noeuds et des barres)

Annexe 4-b : déformée du
pylône
Annexe 4-c valeur des réactions


Annexe 4-d : quelques valeurs des contraintes et
déplacements
| 

