5.2. Les robots mobiles
Un robot mobile est celui qui peut se déplacer dans son
environnement de façon indépendante. Pour ce faire, le robot doit
pouvoir naviguer, et la portée et la précision de navigation
requise varie en fonction de la taille du robot et du type de sa
tâche.
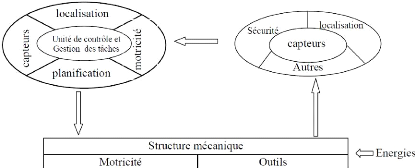
5.2.1. L'architecture des robots mobiles
L'architecture des robots mobiles se structure en quatre
éléments :
? La structure mécanique et la motricité
? Les organes de sécurité
? Le système de traitement des informations et gestion des
tâches. ? Le système de localisation.
12
Figure 1.18 Architecture d'un robot mobile
5.2.2. Les robots à roues
Il existe plusieurs classes de robots à roues
déterminées, principalement, par la position et le nombre de
roues utilisées.
Nous citerons ici les quatre classes principales de robots
à roues.
a) Robot unicycle
Un robot de type unicycle est actionné par deux roues
indépendantes, il possède éventuellement des roues folles
pour assurer sa stabilité. Son centre de rotation est situé sur
l'axe reliant les deux roues motrices.
C'est un robot non-holonome, en effet il est impossible de le
déplacer dans une direction perpendiculaire aux roues de locomotion.
Sa commande peut être très simple, il est en effet
assez facile de le déplacer d'un point a un autre par une suite de
rotations simples et de lignes droites. [7]
Figure1.19 Robot de type unicycle
b) Robot tricycle
Un robot de type tricycle est constitué de deux roues
fixes placées sur un même axe et d'une roue centrée
orientable placée sur l'axe longitudinal. Le mouvement du robot est
donné par la vitesse des deux roues fixes et par l'orientation de la
roue orientable. Son centre de rotation est situé à
l'intersection de l'axe contenant les roues fixes et de l'axe de la roue
orientable.
13
C'est un robot non-holonome. En effet, il est impossible de le
déplacer dans une direction perpendiculaire aux roues fixes. Sa commande
est plus compliquée. Il est en général impossible
d'effectuer des rotations simples à cause d'un rayon de braquage
limité de la roue orientable. [7]
Figure1.20 Robot de type tricycle
c) Robot voiture
Un robot de type voiture est semblable au tricycle, il est
constitué de deux roues fixes placées sur un même axe et de
deux roues centrées orientables placées elles aussi sur un
même axe.
Le robot de type voiture est cependant plus stable puisqu'il
possède un point d'appui supplémentaire.
Toutes les autres propriétés du robot voiture sont
identiques au robot tricycle, le deuxièmes pouvant être
ramené au premier en remplaçant les deux roues avant par une
seule placée au centre de l'axe, et ceci de manière à
laisser le centre de rotation inchangé. [7]
Figure1.21 Robot de type voiture
d) Robot omnidirectionnel
Un robot omnidirectionnel est un robot qui peut se
déplacer librement dans toutes les directions. Il est en
général constitué de trois roues décentrées
orientables placées en triangle équilatéral.
L'énorme avantage du robot omnidirectionnel est qu'il
est holonome puisqu'il peut se déplacer dans toutes les directions. Mais
ceci se fait au dépend d'une complexité mécanique bien
plus grande. [7]
Figure1.22 Robot de type omnidirectionnel Comparaison des
différents types
Nous pouvons observer dans le tableau ci-dessous un
récapitulatif des avantages et des inconvénients des
différents types de robots à roues
Tableau 1.1 Les avantages et des inconvénients des
différents types de robots à roues
|
Type du robot
|
Avantage
|
Inconvénient
|
|
unicycle
|
* Stable
* Rotation sur soi-même
* Complexité mécanique faible
|
* Non-holonome
|
|
Tricycle
|
* Complexité mécanique
modérée
|
* Non-holonome
* Peu stable
* Pas de rotation sur soi-même
|
|
Voiture
|
* Stable
* Complexité mécanique
modérée
|
* Non-holonome
* Pas de rotation sur soi-même
|
|
Omnidirectionnel
|
* Holonome
* Stable
* Rotation sur soi-même
|
* Complexité mécanique
importante
|
6. Domaine d'utilisation des robots
Les robots industriels : robots industriels
sont des robots utilisés dans un environnement de fabrication
industrielle. Ils sont utilisés dans la fabrication des automobiles, des
composants et des pièces électroniques, des médicaments et
de nombreux produits
Robots domestiques ou ménagers :
Robots utilisés à la maison. Ce type de robots comprend
de nombreux appareils très différents, tels que les aspirateurs
robotiques, robots nettoyeurs de piscines, balayeuses, nettoyeurs
gouttières et autres robots qui peuvent faire différentes
tâches. En outre, certains robots de surveillance et de
téléprésence pouvaient être
considérées comme des robots ménagers se il est
utilisé dans cet environnement.
Robots en médecine et chirurgie : Les
robots semblent avoir de l'avenir à l'hôpital. Robodoc aide
à réaliser certaines opérations de chirurgie. Le robot
infirmier est encore en projet. Le cybersquelette HAL aide les personnes
à se déplacer. Et le robot patient permet aux futurs chirurgiens
dentistes d'apprendre à soigner sans faire de dégâts...

14
Le système chirurgical Da Vinci : Le robot chirurgien
permet d'opérer à distance, soit dans la même pièce
avec une machine comme intermédiaire, soit d'un endroit très
éloigné, ce qui peut être très utile souvent.
15
Figure 1.23 Robot chirurgical Da Vinci
Les infirmiers du futur : Les infirmiers qui portent et
déplacent les malades seront des robots. En fait, ils ne sont pas
prévus pour un avenir si lointain: ils fonctionnent
déjà!
Le robot infirmier peut prendre un patient dans ses bras, le
porter et le déposer dans un fauteuil.

Figure 1.24 Robot infirmier RIBA
Le robot patient : L'actroïde Simroid assez
réaliste réagit quand l'opérateur le touche à un
endroit sensible. Il permet ainsi de réaliser un apprentissage du
métier sans frais.
Hanako Showa est une initiative similaire. Grâce
à des capteurs implémentés dans ses dents artificielle, le
robot peut réagir aux actes du praticien novice, émettre des
gémissements ou bouger les bras quand on lui "fait mal". Il peut
même communiquer grâce à un procédé de
synthèse vocal.

Figure 1.25 Robot patient Hanako Showa
7. Avantages et inconvénients des
robots
Un système robotique consiste non seulement des robots
mais aussi d'autres dispositifs et systèmes qui sont utilisés
avec le robot pour effectuer la tâche nécessaire. Les avantages
des robots sont: [12]
Robotique et automatisation peut dans de nombreuses situations
d'accroître la productivité, la sécurité,
l'efficacité, la qualité et la cohérence des produits.
Les robots peuvent travailler dans un environnement dangereux,
sans le besoin de soutien de la vie, ou les préoccupations concernant la
sécurité.
Robots n'ont pas besoin de l'éclairage, la climatisation,
de ventilation et de protection contre le bruit.
16
Robots travailler continuellement, sans ressentir une fatigue
ou l'ennui, et ne nécessitent pas une assurance médicale ou de
vacances.
Les robots sont de précision répétable
à tous les moments, sauf si quelque chose arrive à eux ou ils
s'usent.
Les robots peuvent être beaucoup plus précis que
les humains. Précision linéaire d'un robot typiquement est de 20
à 10 microns.
L'inconvénient des robots est qu'ils manquent de
capacité de réagir en cas d'urgence, à moins que les
situations comprises et les réponses sont inclut dans le système.
Les mesures de sécurité nécessaires pour s'assurer qu'ils
ne lèsent pas les opérateurs et n'endommagent les machines qui
travaillent avec eux. Inconvénients des robots comprennent: [12]
? Réponse inadéquate ou mal,
? Le manque de pouvoirs prendre une décision,
? Consommation de l'énergie
? Ils peuvent causer des dommages à des autres appareils,
et la blessure de l'homme
Bien que les robots ont de bonnes certaines
caractéristiques mais aussi ont ces caractéristiques
limités comme la capacité à degré de
liberté, la dextérité, capteurs, système de vision
et la réponse en temps réel. Les robots sont coûteux en
raison du: coût initial de l'équipement, le coût
d'installation, le besoin de périphériques, le besoin de
formation et la nécessité de la programmation.
17
8. Conclusion
A travers ce chapitre on peut dire que dans le cadre de la
robotique, la robotique mobile joue un rôle à part. Contrairement
aux robots industriels manipulateurs qui travaillent de façon autonome
dans un grand nombre d'usines automatisées, les robots mobiles sont
très peu répandus. Cette situation n'est pas due au manque
d'applications possibles, mais dés qu'on dispose de la mobilité,
on peut imaginer des robots facteurs, nettoyeurs, gardiens, démineurs,
explorateurs, jardiniers et beaucoup d'autres. La faible diffusion est surtout
due au fait que ces tâches ont une complexité bien
supérieure à celles effectuées par des robots
manipulateurs industriels. Le monde dans lequel un robot mobile doit se
déplacer est souvent très vaste, partiellement ou totalement
inconnu, difficilement caractérisable géométriquement et
ayant une dynamique propre.
| 

