3.2.1. Conception et réalisation des pièces
4. Tableau 4.8 Les pièces du robot

roue
arrière
moteur
Pompe d'eau
batterie
boutie d'eau
68
4.1.1. L'assemblage du robot ? Châssis sous le
logiciel
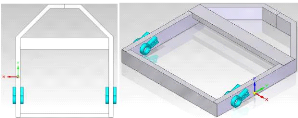
Figure 4.26 Le châssis du robot sous Solid Edge
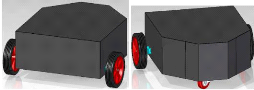
? Châssis réalisé

Figure 4.27 Le châssis du robot réalisé
69
? Le cadre sous le logiciel

Face en avant Face en arrière

Face de haut Face de bas
Face de l'arrière droit Face de l'avant
gauche
Figure 4.28 Le cadre du robot sous Solid Edge
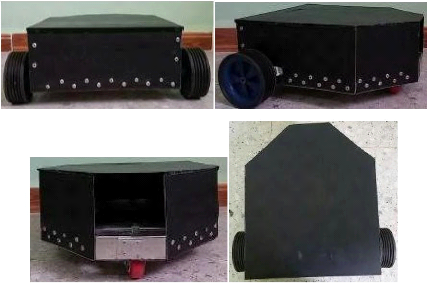
? Le cadre réalisé
Face en avant Face en arrière
70
Face de haut Face de bas

Face de l'arrière droit Face de l'avant
gauche
Figure 4.29 Le cadre de robot réalisé
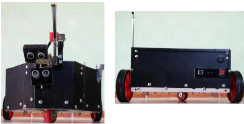
Remarque :
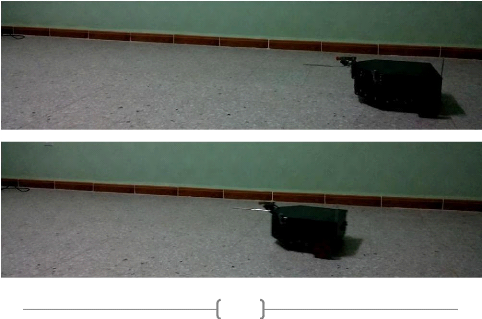
Après assemblage du cadre, et le test du robot nous avons
trouvé un problème dans sa fonctionnement qui est, il ne marche
pas tout droit.

71
Figure 4.30 Mauvaise fonctionnement du robot
Nous avons pensé à la cause du problème, et
nous avons remarqué d'après l'étalonnage de circuit de
commande, que les sorties liées au moteur 1 sont toujours
élevé par rapport les sorties liées au moteur 2, donc nous
changeons le circuit de commande trois fois, mais le problème reste
comme il est.
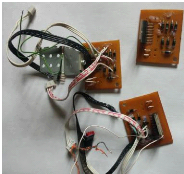
Figure 4.31 Les anciens circuits de commande
Puis nous avons pensé que le problème peut
être du cadre lui même, et quand nous avons le
vérifié, effectivement nous avons constaté que la
côté arrière est inferieur de la côté avant
par 1.3 cm, de nouveau nous avons reconstruire le cadre encore une fois. Mais
cela ne résout pas complètement le problème, mais
légèrement amélioré.
72
Figure 4.32 L'ancien cadre
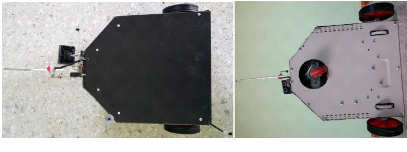
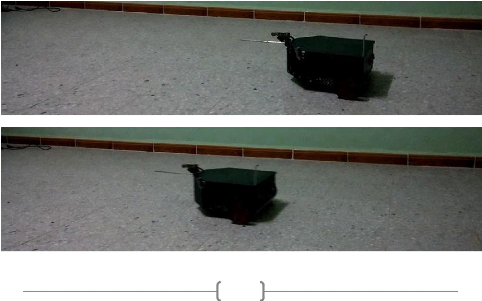
En fin et après une réflexion profondé nous
avons atteint une solution mathématique qui est comme suit, nous avons
remarqué que dans l'intervalle [206 , 255] de chaque courbe
d'étalonnage de circuit de commande, la variations est presque
linéaire, nous avons extrait la fonction linéaire pour chacun des
deux courbes l'aide de Microsoft Office Excel, et puisque la fonction du moteur
2 est toujours petit devant la fonction du moteur 1, donc nous avons
fixé la valeur de sortie du moteur 2, et nous avons extrait la valeur de
sortie du moteur 1 de sa fonction linéaire. Et comme ça le
problème est résolu définitivement.

73
Figure 4.33 Bonne fonctionnement du robot
Nous notons ici que le temps que nous avons passé pour
trouver une solution pour dépasser deux mois.
Contrôle à distance
Pour contrôler le robot à distance nous avons
utilisé l'application QuickRemote de téléphone mobile pour
crée un télécommande spéciale pour le robot.

Figure 4.34 L'icone de l'application QuickRemote
La création d'une nouvelle télécommande
se fait par l'ajout des touches nécessaire puis configuration les ordres
émis par chaque touche

74
Figure 4.35 La télécommande crée
En fin de compte, il ne reste que la programmation du robot et le
testé.
5. Le teste de robot
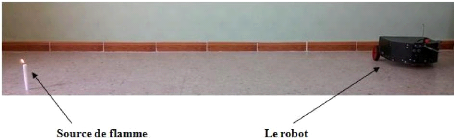
Le démarrage du robot

Le robot se dirige vers la source


Le robot va vers la flamme

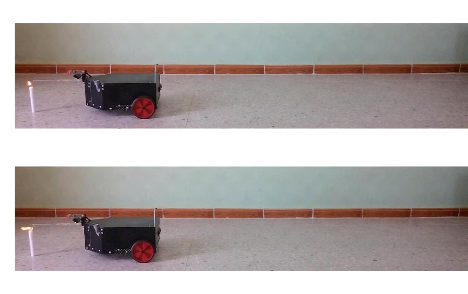
Le robot atteint à la source
Le robot commence à éteindre la flamme
La flamme est éteinte

Figure 4.36 L'opération de teste
75
76
| 

