Chapitre 4 :
Réalisation
1. 50
Introduction:
Le but essentiel de notre travail est d'utiliser l'arduino pour
commander le robot mobile. On doit construire un prototype de ce robot qui
contient un petit cadre d'aluminium clôturer de tel sort qu'on va obtenir
a la fin un boitier qui circule a l'aide des trois roues, et pour pouvoir
commander ce boitier on doit le connecter a des circuits d'alimentation, de
commande et des capteurs puis a une carte arduino contient le programme qui
nous permet de gérer tout les applications de ce robot.
2. La conception de robot : 2.1. La structure de base du
robot :
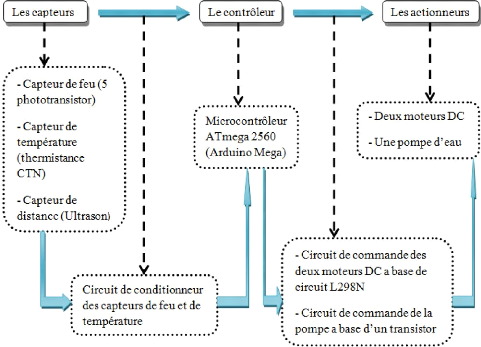
Figure 4.1 La structure générale du robot
2.2. Détail de chaque bloc :
2.2.1. Les Capteurs :
Tout d'abord et puisque la tache principale de ce robot c'est
la détection et l'extinction de l'incendie, elle est besoin d'un capteur
de flamme, le problème qui se pose comment il se sent de la
présence du feu.
Parmi plusieurs capteurs qui peuvent effectuer la tâche
nous avons choisi un capteur infrarouge a base d'un phototransistor, a cause de
sa disponibilité, son schéma et sa réalisation n'est pas
compliqué et bien sur de l'autre côté que leur cout n'est
pas cher.
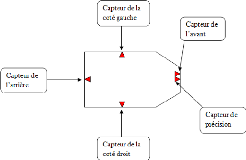
On a utilisé 5 capteurs, quatre pour déterminer
de quelle coté provient le signal de la flamme, de l'avant, de
l'arrière, du droit ou de la gauche d'une coté et de l'autre
coté ils sont pris comme un référence par la mesure de
l'intensité de la lumière avant l'existence de la flamme (au
début de démarrage), de cette dernière on peut programme
le robot à partir quelle grandeur il doit réagi. Le
cinquième est mis en avant et utiliser pour déterminer la
direction vers la flamme avec grande précision.
51
Figure 4.2 Le placement des capteurs infrarouge dans le robot
Le schéma du capteur infrarouge :
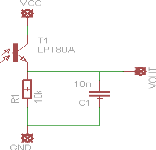
Figure 4.3 Schéma du capteur infrarouge
L'étalonnage de capteur infrarouge:
Dans cette étalonnage on mesure dans le premier cas on
absence de flamme la valeur maximale entre les 4 capteurs qui sont utiliser
pour les cotes, nous avons choisi la valeur maximale pour assurer que chaque
capteur ne dépasse pas cette valeur à cause de leurs
incertitudes. Puis on mesure la valeur maximale de ces 4 capteurs approprie
à une distance bien déifiée, cette distance variée
par un pas de 5 cm de 5 à 150 cm. On répète
l'étalonnage plusieurs fois en variant l'intensité de la
lumière ambiante. (Remarque : la valeur mesurée c'est une valeur
numérique, au lieu de mesurer la
52
valeur du capteur en Volt puis on converti en valeur
numérique pour la programmation on prend directement la valeur
numérique mesurée par l'arduino. (Annexe A).
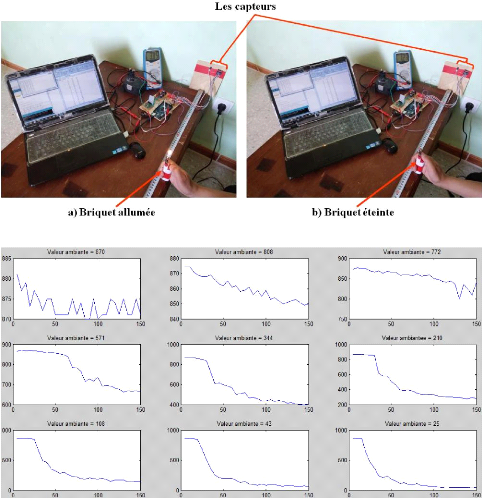
Figure 4.4 L'opération d'étalonnage
Figure 4.5 La valeur maximale en fonction de distance
On remarque que :
? Les graphes d'étalonnage des capteurs commence a
prend la même forme a partir d'une intensité lumineuse ambiante
approprier à la valeur 571.
? La variation de la valeur mesurée et la distance sont
proportionnelle.
? Entre 5cm et 25cm la valeur mesurée a peu pris stable il
subit à une petite variation.
? Entre 25cm et 45 la relation entre la distance et la valeur
mesurée est une relation à peu pris linière
53
? Entre 70 et 150 la valeur mesurée est subit à des
petites variations, il existe aussi à cet intervalle une relation
à peu pris linière.
La deuxième partie d'étalonnage de ce capteur
c'est l'étalonnage angulaire. Tout comme le précédent on
mesure la valeur maximale de 4 capteur des cotés en absence de flamme,
puis on mesure la valeur maximale de 4 capteur à un angle bien
défini, l'intervalle angulaire se varie de - 30° à +30°
par un pas de 5°. On répète l'étalonnage plusieurs
fois en variant l'intensité de la lumière ambiante.(Annexe A).
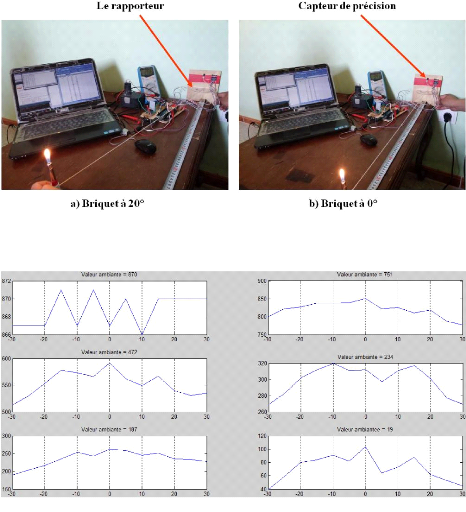
Figure 4.6 L'opération d'étalonnage angulaire
Figure 4.7 La valeur maximale en fonction de l'angle
En remarque que :
? Les graphes d'étalonnage des capteurs commence a prend
la même forme a partir d'une intensité lumineuse ambiante
approprier à la valeur 751.
? Le pic maximale dans la plus par des graphes se situer en
angle de Ø° par rapport au capteur si que signifie que le capteur
attendre sa repense maximale quand la source de flamme se situer en face de
lui.
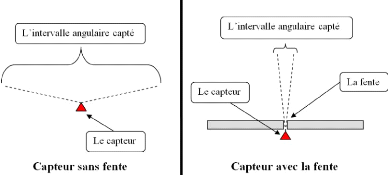
À partir de l'étalonnage on remarque que ce
capteur a un intervalle angulaire très large ce qui ne nous aidons pas
à dirigé le robot vers la flamme avec précision, pour
sortir de cette cas on utilise une fente qui réduit l'intervalle
angulaire comme le montre dans la figure ci-dessous.
54
Figure 4.8 L'effet de la fente sur le capteur
? L'étalonnage de capteur avec la fente ?
L'étalonnage de distance
Dans cet étalonnage on prend les mêmes conditions
que le précédent, mais on mesure seulement la valeur du capteur
de précision où on ajoute la fente, puisque rien ne change pour
les autre capteurs (annexe A).
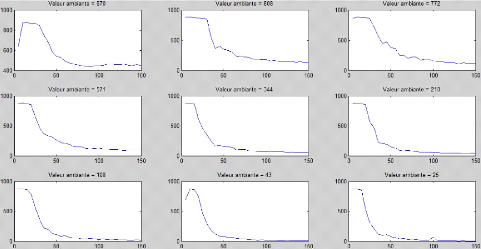
Figure 4.9 La valeur de capteur de précision en fonction
de distance
55
Dans cette graphe on a les même remarque que le
précédent (Figure 4.5), La chose qui est claire ici est l'absence
totale des fluctuations. Et bien sûr, cela résulte de
l'utilisation de la fente.
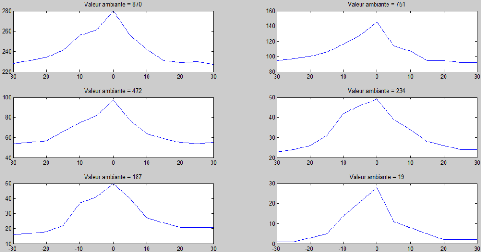
Figure 4.10 La valeur de précision en fonction de
l'angle
On remarque a partir de cet graphe que :
? Toutes les courbes ont la même forme
? Contrairement au graph précisant, il y a un changement
régulier des valeurs mesurées, elles
commencent à augmenter jusqu'à ce qu'ils
atteignent la valeur maximale à 0°, puis elles
commencent à diminuer jusqu'à la dernière
valeur
? Chaque courbe prend sa valeur maximale au 0°.
? Par rapport le graph précédent il y a une grande
déférence entre la valeur maximale et les
autres valeurs
Mais ce capteur n'est pas la solution parfaite, tout
simplement il ne suffit pas seulement le capteur infrarouge, car s'il y a une
flamme le capteur fonctionne bien, le problème apparut avec l'existence
d'une autre source de la lumière infrarouge (une LED par exemple)
puisqu'il considère cette source comme une flamme.
Pour résoudre totalement le problème de
l'existence de la flamme on utilise un capteur de température pour
mesurer la température de la source. Aussi ce problème a
plusieurs solutions et parmi ces solutions nous avons choisi un capteur
à base d'une thermistance parce qu'elle est aussi largement disponible,
pas cher et facile a réalisé. Comme les autres composants en
électronique il n'existe pas un seul type de thermistance, mais il y a
deux types les CTP (coefficient de température positif)
ou PTC et les CTN (coefficient de température
négatif) ou NTC.
Nous avons pris notre décision d'utilise le CTN a
partir de la courbe d'étalonnage des deux thermistances apparu au figure
ci-dessous puisque la courbe de CTN a une forme exponentielle.
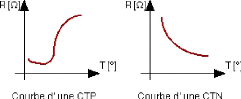
Figure 4.11 Courbe d'étalonnage de thermistance
On utilise cette thermistance comme un thermostat, on
s'intéresse a une seule valeur qui représente la tension
appropriée à la chaleur du feu puisque l'information que nous
voulons c'est s'il y a une flamme ou non, et bien sur s'elle existe sa
température sera trop élevée par rapport a la
température ambiante, et cela simplifie beaucoup la tâche.
Le schéma du capteur de température
:

Figure 4.12 Schéma de capteur de température
Pour l'étalonnage on n'a pas besoin de le faire car on
ne s'intéresse pas à la valeur exacte de température mais
du changement important de la valeur de sortie dans une durée bien
définie, et d'une autre part on a remarqué que le temps de
repense de la thermistance est très grand.
Maintenant parce que le robot peut se déplacer dans des
différents lieux et des différents espaces, il peut être
entravé par des obstacles et de forage, alors l'utilisation d'un capteur
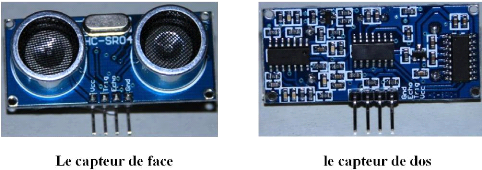
de distance devient nécessaire. Nous avons choisi le capteur ultrason
HC-SR04.
56
Figure 4.13 Capteur ultrason HC-SR04
57
Pourquoi se module parce que tout ce qu'il faut pour un capteur
ultrason est intégré dans une seule petite pièce. Ce
module dispose simplement de 4 pins de sortie : VCC, TRIG, ECHO, GND. Il est
donc très facile de l'interfacer à un microcontrôleur.
Le processus complet est le suivant: Mettre le pin "TRIG" une
impulsion de niveau haut (5V) durant au moins 10us et le module démarre
sa lecture; A la fin de la mesure, s'il détecte un objet devant lui, le
pin "ECHO" passe au niveau haut (5V). Et, la distance où se situe
l'obstacle est proportionnelle à la durée de cette impulsion. Il
est donc très facile de calculer cette distance avec la
formule suivante:
Les caractéristiques de capteur HC-SR04
:
· La tension de fonctionnement : 5V
· Le courant de fonctionnement : 15mA
· Fréquence de fonctionnement : 40Hz
· La distance de détection : de 2cm à
450cm
· L'intervalle angulaire de capture : de -7,5°
à +7,5°
· Signale de détection : impulsion de 10us TTL
· Signale d'écho : sortie TTL PWL
L'étalonnage de capteur de distance :
Dans cet étalonnage nous utilisons une plaque de bois
qui à été séparée de capteur par une
distance bien définie, et nous mesurons la distance captée. A
chaque fois on varie la distance et on relève la valeur
mesurée.(Annexe A).
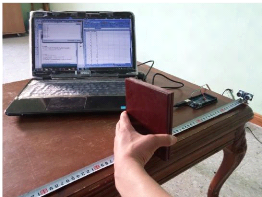
Figure 4.14 L'opération d'étalonnage de capteur
de distance
58
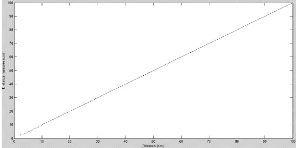
Figure 4.15 Étalonnage de capteur de distance HC-SR04
On remarque que :
? Il commence à fonctionner a partir de 2cm
? Le capteur est linéaire
? A l'intervalle [2 9,5] il ya a des petites fluctuations ce
que signifie que la sensibilité de ce capteur est de 1cm
Ceci est tout sur la première partie du robot qui est
les capteurs, qui représente leur sens. Mais la partie suivante est le
cerveau de robot, que nous allons parler maintenant.
| 

