Conception et réalisation d'un robot mobile à base d'arduino( Télécharger le fichier original )par Hocine TAKHI Université Amar Telidji - Instrumentation 2014 |

Chapitre 3 :Microcontrôleur et Arduino
Depuis la création de microprocesseurs, 4, 8, 16, 32 bits. Les microprocesseurs/microcontrôleurs ont développé et sont apparu sur le marché. Intel 4004 était le premier processeur à 4 bits qui est apparu en 1971. Ces instructions sont de 8 bits, mais ces données traitées sont de 4 bits. Il avait mémoires externes séparés, pour le programme (4K) et les données (1K). Il y avait 46 instructions et la fréquence d'horloge est de 740 kHz. Puis, en 1972, Intel 4040, la version améliorée de 4004. 4040 avaient 14 instructions de plus avec mémoire 8K du programme et des possibilités d'interruption. En 1974, Texas Instruments a présenté le premier microcontrôleur TMS 1000. TMS 1000 avait dans la même puce une RAM, une ROM, et les I / Os. Intel 8080 a ensuite été introduit en 1974, c'est la version améliorée de 8008, qui est également apparu en 1972. Intel 8085 a été élaboré en 1976. Cela pourrait fonctionner sur +5V et fréquence de 3 MHz. Dans la même année, Zilog Z-80 est apparu comme une amélioration par rapport Intel Z80 8080. Z80 fonctione à 2,5 MHz, et dans la version CMOS (Complementary Metal Oxide Semiconductor), fonctionne à 10MHz. Immédiatement après Intel 8080, en 1975, Motorola a lancé son 6800, suivi plus tard par le 6502 et 6809, etc. Ensuite, Intel 8084 a été développé comme un microcontrôleur autour de 1976. C'est la famille MCS-48. Il est possible de stocker les données sur la même puce, mais le code a été stocké dans la mémoire externe de programme. il est immédiatement remplacé par le MCS-51 famille de microcontrôleurs en 1980. Intel MCS-51 utilise plus souple des instructions de 2 octets. Sur une seule puce il procède (RAM / EPROM ROM RAM). En 1982, Motorola a présenté microcontrôleur 6805. Le PIC (Peripheral interface controller) est né à l'Université Harvard en 1975. Les familles de microcontrôleurs PIC a été introduit vers 1985, par Microchip. PIC utilise l'architecture de Harvard, et il dispose d'un jeu d'instructions réduit. Intel 8086 a été développé en 1978, c'est un processeur de 16 bits. Après, Motorola a présenté un microprocesseur 68000 16-bit, et Zilog introduit Z8000, un microprocesseur 16 bits. Les développements historiques dans les produits de microprocesseurs sont listés dans le tableau suivant : Tableau 3.1 Les développements historiques dans les produits de microprocesseurs
40 1972
En Juin 1997, les microcontrôleurs ATMEL 8 bits AVR ont été introduites qui ont également le jeu d'instructions réduit. Aujourd'hui, nous voyons un certain nombre de familles de microcontrôleurs, de sources multiples et dans de nombreuses versions. [29] 3. Définition de microcontrôleur Un microcontrôleur est un circuit hautement intégré qui rassemble, sur une puce, la plus part ou tout les parties nécessaire d'un ordinateur. Le microcontrôleur comprend généralement: CPU (Central Processing Unit), la mémoire RAM (Random Access Memory), EPROM / PROM / ROM (programmable effaçable Read Only Memory), I / O (entrée / sortie), des timers. [30]
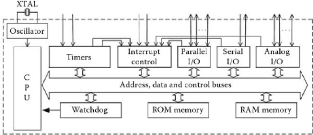
Figure 3.1 Schéma des éléments principaux d'un microcontrôleur 3.1. Les composants internes d'un microcontrôleurUn microcontrôleur le plus simple qu'il soit, possède au minimum les éléments suivants : Une unité centrale qui est le coeur de système, également appelé CPU (Central Processing Unit) dans cette unité centrale nous retrouverons plusieurs éléments telle que l'unité arithmétique et logique (UAL). 41 Une mémoire contenant le programme à exécuter par le microcontrôleur, généralement appelée mémoire morte ou ROM, mémoire à lecture seule. Cette mémoire a la particularité de sauvegarder en permanence les informations qu'elle contient, même en absence de tension (ce qui est primordiale, sino il faudrait reprogrammer le microcontrôleur à chaque remise sous tension !). Une mémoire vive (RAM), cette mémoire permet de sauvegarder temporairement des informations. Il est à noter que le contenu d'une RAM n'est sauvegardé que pendant la phase d'alimentation du circuit. Le microcontrôleur pourra utiliser cette mémoire pour stoker des variables temporaires ou faire des calculs intermédiaires. Un port d'entrées/sorties permettant au microcontrôleur de dialoguer avec l'extérieur pour par exemple prendre l'état d'un capteur, d'un interrupteur ou bien pour allumer une LED ou piloter un relais (via un transistor bien sur). Une base de temps : elle peut être assurée par un cristal de quartz externe, un oscillateur programmable, un résonateur céramique, ou d'une base de temps interne. [35] Des bus internes permettent la communication entres les différents éléments intégrés au microcontrôleur. Et pour certains microcontrôleurs les plus sophistiqués peuvent contenir des éléments supplémentaires, tels que : Convertisseur analogique-numérique (CAN): un convertisseur analogique-numérique a une tension d'entrée analogique et produit une sortie binaire représentative de sa valeur. Dans un CAN linéaire, la plage de valeurs d'entrée analogiques est divisé en intervalles spatiaux de façon égale; dont chacune est affectée a un mot de code binaire. [33] Un convertisseur numérique-analogique (CNA): un CNA accepte un mot d'entrée de n bits b1, b2, b3, ..., bn en binaire et produire un signal proportionnel analogique à elles. La figure ci-dessous montre son symbole. [34]
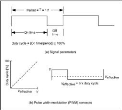
Figure 3.2 Symbole d'un convertisseur numérique/analogique Le PWM (Pulse Width Modulation) : est une technique pour obtenir des résultats analogiques avec des moyens numériques. La commande numérique est utilisée pour créer une onde carrée, le signal se varier entre 1 et 0. Par le changement de la durée du moment où le signal est en 1 par rapport au période du signale carré on peut obtenir des tensions entre les deux valeurs 5 Volts et 0 Volts
42 Figure 3.3 Signal analogique par la technique PWM |
|