3.4.3. Moteurs pas à pas
Les moteurs pas à pas sont des moteurs spéciaux
utilisés pour commander avec une grande précision le
déplacement et la position d'un objet. Comme leur nom indique, ces
moteurs tournent par incréments discrets. Chaque incrément de
rotation est provoque par une impulsion de courant fournie à l'un des
enroulements du stator.
Selon sa construction, un moteur pas à pas peut avancer
de 90°, 45°, 18°, ou d'une fraction de degré seulement
par impulsion. En faisant varier la fréquence des impulsions, on peut
faire tourner le moteur très lentement, d'un pas à la fois, ou
rapidement à des vitesses aussi élevées que 4000 tr/min.
[25]
On trouve trois types de moteurs pas à pas :
? Le moteur à aimants permanents. ? Le moteur hybride.
? Le moteur à réluctance variable.
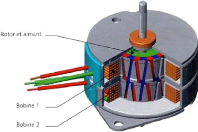
Le moteur à aimants permanents : Le nom de ce type de
moteur pas à pas est lié à la conception de son stator :
une tôle magnétique découpée et emboutie. Sur un
diamètre intérieur, les tôles composent une série de
dents qui symbolise les pôles du stator tout en laissant un espace
torique pour une bobine. Chaque sous-ensemble représente une phase
stator. Le rotor est un barreau aimanté radialement ayant plusieurs
paires de pôles N-S.
37
Figure 2.26 Moteur à aimants permanant
Le moteur hybride : Le moteur pas à pas « hybride
» allie le principe du moteur à réluctance variable à
celui du moteur à aimant permanent. Le rotor du moteur hybride comprend
2 structures régulières de dents. Ces 2 blocs sont
décalés d'une 1/2 dent l'un par rapport à l'autre et sont
fixés de part et d'autre d'un aimant permanent magnétisé
axialement. Le circuit magnétique du stator possède plusieurs
pôles constitués de paquets de tôles entourés chacun
d'une bobine ; les paquets de tôles se terminant par des dents. Une phase
est constituée de plusieurs dents ; 4 dans la plupart des cas. Tous les
pôles de la phase sont décalés de façon à
assurer le déphasage de 90° (quadrature).
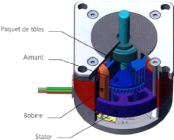
Figure 2.27 Moteur hybride
Le moteur à réluctance variable : Le principe de
fonctionnement de ce type de moteur pas à pas est proche de celui du
moteur hybride, avec une structure dentée au rotor et au stator. Il n'y
a pas d'aimant au rotor pour renforcer l'action du flux et donc pas de couple
résiduel sans courant. Ce type de moteur pas à pas n'est presque
plus utilisé ni fabriqué.
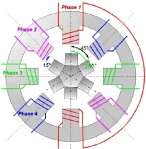
Figure 2.28 Moteur à réluctance variable
38
Si nous devions comparer les différents types de moteurs
pas à pas : Tableau 2.3 comparaison des différents types de
moteurs pas à pas
|
Aimant permanent
|
Hybride
|
Reluctance variable
|
|
Cout
|
Bas
|
Haut
|
Moyen/haut
|
|
Vitesse
|
Bas
|
Très haut
|
Haut
|
|
Couple résiduel
|
Haut
|
Moyen
|
Minimum
|
|
Amortissement
|
Bon
|
Moyen/bon
|
Mauvais
|
|
Inertie rotor
|
Haut
|
Bas
|
Bas
|
|
Rendement
|
Moyen
|
Très haut
|
Moyen
|
|
Angle de pas
|
7.5°/15°/18°
|
0.9°/1.8°
|
1.8°
|
|
Nbrs de pas/tour
|
48/24/20
|
400/200
|
200
|
|
Précision du pas
|
Bas
|
haut
|
Moyen
|
| 

