|
République Algérienne Démocratique et
Populaire
0 TQTNWE dE l(QNETI QEmEQN6DSpITEDr EtEEM
5EFhEIFhEI6FTEQtTfTqDE
UNIVERSITE DES SCIENCES ET DE LA TECHNOLOGIE
D'ORAN
- MOHAMED BOUDIAF -
FACULTE DE GENIE ELECTRIQUE
(3$57(0 (17 0(/ (&7521,48(
Mémoire en vue de l'obtention du diplôme de
Magister
Spécialité : Electronique
Option : Composants
et Systèmes de la Microélectronique Avancée
Présenté par :
SLIMANI ABDOUN
Sujet du mémoire :
Conception et Modélisation d'un
Capteur Acoustique
Soutenue le 15 / 03 / 2010 devant le jury composé de :
|
Mr
|
M. LOUNIS
|
Maître de conférences (USTO-MB)
|
Président
|
|
Mr
|
T. BOUTCHACHA
|
Professeur (USTO-MB)
|
Rapporteur
|
|
Mr
|
D. BENBEKRITE
|
Chargé de cours (USTO-MB)
|
Co-rapporteur
|
|
Mr
|
A. KADDOUR
|
Maître de conférences (USTO-MB)
|
Examinateur
|
Remerciements
Le travail présenté dans ce mémoire a
été réalisé au Laboratoire d'Étude des
Composants Electroniques au Silicium de l'Université des Sciences et de
la Technologie d'Oran - Mohamed Boudiaf dirigé par le professeur Touati
BOUTCHACHA.
Je tiens tout d'abord à remercier le professeur Touati
BOUTCHACHA, pour la confiance qu'il m'a accordée en me proposant de
réaliser ce mémoire au sein de son équipe de recherches
« Composants et Systèmes de la Microélectronique
Avancée ». J'ai été très sensible à ses
remarques et recommandations. Il m'a permis par ses critiques
d'améliorer ce travail qu'il trouve ici l'expression de ma profonde
gratitude pour l'honneur qu'il m'a fait d'avoir bien voulu être
rapporteur de ce travail, et de participer au jury.
Je remercie vivement monsieur Djamel BENBEKRITE, chargé
de cours à l'USTO-MB. Je le remercie d'avoir codirigé ce travail
et de m'avoir fait profiter de ses compétences et de ses conseils
efficaces et d'avoir apporté la rigueur scientifique nécessaire
à son bon déroulement, je tiens également à le
remercier pour sa gentillesse et sa grande disponibilité.
J'adresse toute ma gratitude à monsieur Mourad LOUNIS,
maître de conférences à l'USTO-MB, pour avoir
accepté d'être le président du jury de cette soutenance.
Je remercie également monsieur Abdelhafid Kaddour,
maître de conférences à l'USTOMB, pour
l'intérêt qu'il a porté à mon travail en acceptant
de participer au jury.
Pour vous laisser le loisir d'apprécier ce
mémoire, je terminerai ici, mais je n'oublie évidemment pas ceux
que je n'ai pas nommés ici et aussi ma famille et tous mes amis qui
m'ont apporté leur soutien dans la réalisation de ce modeste
travail.

4Üi ÜÜÜi
cÜÜÜ`~õ .ÜÜ~ÐÜaÜ~
æ fÜ..6:
·
1_,.c9.,.=a Sa~~ . 11Ç
..}1.6. A4Ç..1Ç á1~~ cri
A4Ç..1Ç A4c.3.1 æ
~~~1Ç á~~-1Ç
cfi Ñ3-~Ç r7F3: ~~~~i äÅ
ÌÇi&i.14 111 ä1.A,y
Êii_.1Ç b3å Ú1 aÇæ É
ÐÜ.. . ~~~~~~~~Ç ~~~~~~Ç *~)
:#li~Ç Êv_-~ 0-61--a
cD:L.---'.. .1.4 All.
áj_~1 Ï~.4tÇ A,Ï~? 4:A.1Ç
A.ÇÑÏ 4~Å 3.~1Ç b0å áN~
4).. .81 . l,1ÇÏ
-"..).,?.
·12,5 æ 4_641:11.6d
cittn..4-
|
Ç3+I
|
. ì.~
|
Ai+ CiA
|
"
|
PSPICE
|
"
|
F!)
|
AL.Ç3. A9l11Ç á -~
|
Ú1-3~Ç L.Åæ
:4÷ (:)"3 íÏ~i÷Å 1.0 Â
cf.-4
|
ÏÇi.1Çæ
A,Ï~i#7Ç Á14.4SIÇ á.? Ê1,.i..1
41Ç3:~Ç ulc.
ÉJÂ:
·1Ç b0å c).4
43111Çæ áæ>Ç a..Ñ,_.1Ç
11,......& Ö.;iÇ
c.111Ç Ñi_-1Ç
cy
· áæ>Ç Á.4Ç
t.u.a..et& P' .
~~~~~~Ç bl"-.1 Êi9.~ ÚÇ9- `1:6
æ Ê1."A-1Ç bl"-.1 A7Ï~84Ç
;70-.41Ç
c
·-
·31:3
j..1 1:~.:IAÇ
43111Ç
Á.,~Ç
. Ú4:4 æ Ú1.6
äæ
·. All~Ç á9--1 ArÏl- 43-3.Ç
A"ÇÑ
·1
"
"
PSPICE
æ
cri
ÑÇ_,4 )Å 6416 )1 641.1Ç
Ñ9..1Ç vi ÉÑ9Âa.1Ç
Ï~.4tÇ r_Ï~. ÌÐ~.11Ç äÅ
. Aill,1Ç á j_N..41
ZALASIÇ Z
·14.41Ç Útli.,...V
1.A.1,1.1.. ZIA .~ 43Ï~4#7Ç A,114 €S1Ç
ÉÏ~.114 :À:~Ç ÒÇ:~åNÇ
á11, äl4 1_,:cui J.S.I.,i l+1
41Å AIL:=714 .W~ ..Çæ ÏÏ.~
-.4j4.
·_4 3&.1:1 411Ç
Ï~.4tÇ A3.1:'.Nli "0~.4~~Ç 43..1Ç
'7ÇÑ.1 &ÇilÇ Ñj_-1Ç 1:.a
Ê1~:~1Ç b3å J4111 . A1.d~
Z#ÇilÇ cci 4å Aye
ÊÇÑ14c 1'411 -11Âæ
ÊÇÏÏ511Ç .t.4...
4.5.1c. 641,5 l+1 4~Å
'AIL:414 ÒÇ_5åVÇ áLS.
ap. á1_VÇ Ñ14.1c.iÇ
A_Ï~.#7Ç '4114)41Ç ÊZ1~. æ
Z1æ..1Ç Ê.~tz. 0.eix4 110.14
ÇÐÅ Ï~~)7Ç r.Ï1? ÊÇÑ14c
41Å 1..1 ciS.4,1 411Ç
Ï~
·4tÇ
. t÷Ç..1Ç `.L vi
ÉtIm.1Ç
|
0~-~~~~1Ç cZ'.11Ç áN.~.14
lili ~ja.1Ç LiNkl ula c.
~JÇ Öiii ãti&1Ç viæ
|
L.:cui
.
|
'..Ü4. ce-Alul ...).-4
:LS-Uzi á ÜÜ-~ PZT
rlÏ~d÷7Ç ro(14)ÜÜÜ41Ç
ÏÇ-AlÇ :7Ï~84Ç
Á~).ÜÜÜÜ41Ç : ZyjÜåi~1Ç
Ê44,~~Ç . PSPICE
Ï~.4tÇ A.1.1 43Ü.. Ï~.4tÇ A3Ï~.

Conception et modélisation d'un capteur
acoustique
Résumé
L'amélioration de la qualité des images dans le
domaine de l'imagerie médicale et qualité des contrôles
dans le domaine du contrôle non destructif est liée en particulier
à celle des transducteurs ultrasonores piézoélectriques
utilisés. La modélisation et la simulation de transducteurs
permettent de les caractériser et optimiser. L'objectif de ce travail
est d'une part de traiter la modélisation unidimensionnelle et
tridimensionnelle d'un transducteur ultrasonore piézoélectrique,
et d'autre part de simuler le transducteur avec PSPICE. À cet effet, des
généralités sur la piézoélectricité
et matériaux piézoélectriques, ultrasons et transducteurs
ultrasonores sont respectivement décrits dans le premier et
deuxième chapitre. Ensuite, la modélisation unidimensionnelle du
transducteur sans et avec pertes est traitée dans la première
partie du troisième chapitre. Dans la deuxième partie, le
logiciel PSPICE est utilisé pour simuler l'impédance
électrique du transducteur. Les modèles unidimensionnels
décrits dans le chapitre précédent ne sont applicables
uniquement qu'autour d'une fréquence de résonance
particulière, ainsi ils supposent que les modes de vibrations d'une
céramique piézoélectrique sont découplés,
cependant, il existe des couplages entre ces modes. Afin de surmonter ces
difficultés, nous traitons dans le quatrième chapitre une
modélisation analytique tridimensionnelle qui prend en compte le
couplage entre les modes de vibration et qui est valable à toutes les
fréquences. De plus, elle nous donne des expressions tridimensionnelles
qui se réduisent aux expressions simplifiées unidimensionnelles
lorsque certains coefficients élastiques et
piézoélectriques sont supposés nuls. Enfin, dans le but de
valider nos résultats de simulation, des résultats
expérimentaux extraits de la littérature sont
exploités.
Mots-clefs :
Piézoélectricité, matériaux
piézoélectriques, PZT, transducteur ultrasonore
modélisation unidimensionnelle, modélisation tridimensionnelle,
PSPICE.
Table des matières
Remerciements i
Résumé ii
Table des matières iv
Liste des figures viii
Liste des tableaux x
Principales notations, symboles et constantes physiques
xi
Introduction générale 1
1 Principes fondamentaux de la
piézoélectricité 3
1.1 Introduction 4
1.2 Historique de la piézoélectricité 4
1.3 Effet piézoélectrique 6
1.4 Symétrie et piézoélectricité
6
1.5 Equations de la piézoélectricité 8
1.6 Caractéristiques électriques et
mécaniques des matériaux piézoélectriques ........
10
1.6.1 Permittivité « åij » 10
1.6.2 Compliance élastique « sij » 10
1.6.3 Constante de charge piézoélectrique «
dij » 10
1.6.4 Constante de tension piézoélectrique «
gij » 11
1.6.5 Coefficient de couplage électromécanique
« k ij » 11
1.6.6 Facteur de qualité « Q » 11
1.7 Les matériaux piézoélectriques 12
1.7.1 Les principaux matériaux
piézoélectriques 12
1.7.1.1 Les cristaux piézoélectriques 12
1.7.1.2 Les céramiques piézoélectriques
13
1.7.1.2.1 Généralités 13
1.7.1.2.2 Les zircono titanates de plomb (PZT) 14
1.7.1.2.2.1 Structure et polarisation des PZT 14
1.7.1.2.2.1.1 Structure des PZT 14
1.7.1.2.2.1.2 Polarisation des PZT 14
1.7.1.2.2.2 Matrice
élasto-piézo-diélectrique des PZT 17
1.7.1.2.2.3
Caractéristiques des céramiques piézo-
électriques PZT 17
1.7.1.3 Les polymères piezoelectriques 18
1.7.1.3.1 Generalites 18
1.7.1.3.2 Origine de la piezoelectricite dans le PVDF .... 19
1.7.1.3.3 Caracteristiques des polymères piezoelectriques
19
1.7.2 Autres materiaux piezoelectriques 20
1.7.2.1 Les composites piezoelectriques 20
1.7.2.1.1 Classification 20
1.7.2.1.2 Caracteristiques des piezocomposites 1-3 ..... 21
1.7.2.2 Les couches epaisses piezoelectriques 21
1.7.3 Choix du materiau piezoelectrique .... 22
1.8 Modes de déformation d'un matériau
piézoélectrique 22
1.8.1 Modes de deformation fondamentaux 23
1.8.1.1 Mode longitudinal {33} 23
1.8.1.2 Mode transversal {31 ou 32} 23
1.8.1.3 Mode cisaillement {15} 23
1.8.2 Autres modes de deformation 24
1.9 Quelques applications des materiaux piezoelectriques 24
1.9.1 Transformateurs piezoelectriques 24
1.9.2 Chaussures piezoelectriques 25
1.9.3 Actionneurs bilames 26
1.9.4 Imprimantes à jet d'encre 27
1.10 Conclusion 28
2 Différents types de transducteurs ultrasonores
29
2.1 Introduction 30
2.2 Theorie des ultrasons 30
2.2.1 Definition et applications des ultrasons ... 30
2.2.2 Parametres de l'onde ultrasonore 31
2.2.2.1 Longueur d'onde et vitesse de propagation 31
2.2.2.2 Impedance acoustique 32
2.2.2.3 Pression et intensite acoustiques 32
2.2.3 Interaction du faisceau ultrasonore avec la matière
32
2.2.3.1 Réflexion et réfraction d'une onde
ultrasonore 32
2.2.3.2 Atténuation d'une onde ultrasonore 34
2.3 Differents types de transducteurs ultrasonores et leurs
principes de fonctio-
nnement 34
2.3.1 Transducteur piezoelectrique 34
2.3.1.1 Structure d'un transducteur piézoélectrique
34
2.3.1.2 Description du faisceau ultrasonore emis par un
transducteur
piezoelectrique 35
2.3.2 Transducteur capacitif 37
2.3.3 Transducteur piezoresistif 38
2.3.4 Transducteur impulsion-echo 38
2.4 Conclusion 39
3 Modélisation unidimensionnelle et simulation
d'un transducteur ultrasonore piézoélectrique 40
3.1 Introduction 41
3.2 Modelisation unidimensionnelle d'un transducteur ultrasonore
piezoelectrique 41
3.2.1 Transducteur sans pertes 41
3.2.1.1 Transducteur comme un système lineaire à
trois ports 41
3.2.1.2 Impedance electrique du transducteur 43
3.2.1.2.1 Expression de l'impédance électrique
.................... 43
3.2.1.2.2 Caractérisation du transducteur .... 44
3.2.1.2.3 Simulation de l'impédance électrique
.... 46
3.2.1.2.4 Validation des résultats de simulation
.................... 48
3.2.1.3 Schémas électriques équivalents
49
3.2.1.3.1 Schéma électrique équivalent de
Mason .......... 49
3.2.1.3.2 Schéma électrique équivalent KLM
.... 50
3.2.1.3.3 Schéma électrique équivalent de
Leach ..... 51
3.2.2 Transducteur avec pertes 52
3.2.2.1 Différents types de pertes 52
3.2.2.1.1 Pertes diélectriques 52
3.2.2.1.2 Pertes mécaniques 53
3.2.2.2 Impédance électrique avec pertes du
transducteur 53
3.2.2.2.1 Expression de l'impédance électrique avec
pertes 53
3.2.2.2.2 Simulation de l'impédance électrique avec
pertes 53
3.2.2.3 Schéma électrique équivalent
simplifié du transducteur ..... 55
3.2.2.3.1 Schéma électrique équivalent
simplifié . 55
3.2.2.3.2 Identification des paramètres du schéma
électrique équivalent simplifié 56
3.2.2.3.2.1 Procédé d'identification 56
3.2.2.3.2.2 Simulation de l'admittance électrique ....
58
3.2.2.3.2.3 Identification des paramètres 59
3.3 Simulation d'un transducteur ultrasonore
piézoélectrique .... 59
3.3.1 Caractérisation de la ligne de transmission et
analogie électroacoustique ... 59
3.3.2 Sous-circuit PSPICE du modèle de Leach 62
3.3.3 Simulation de l'impédance électrique du
transducteur 63
3.3.3.1 Procédé de simulation 63
3.3.3.2 Résultats de simulation 64
3.3.3.3 Validation des résultats de simulation 65
3.3.3.4 Paramètres utilisés pour la simulation
66
3.4 Conclusion .... 67
4 Modélisation tridimensionnelle d'un transducteur
ultrasonore piézoélectri-
que 68
4.1 Introduction 69
4.2 Hypotheses générales 70
4.3 Expression tridimensionnelle de l'impédance
électrique d'une céramique
piézoélectrique .... 72
4.3.1 Céramique piézoélectrique de forme
parallélépipédique 72
4.3.2 Céramique piézoélectrique de forme
cylindrique 74
4.3.3 Discussion 76
4.4 Simulation de l'impédance électrique d'une
céramique piézoélectrique 76
4.4.1 Résultats de simulation 76
4.4.1.1 Céramique de forme
parallélépipédique 76
4.4.1.2 Céramique de forme cylindrique 78
4.4.2 Validation du modele tridimensionnel de l'impédance
électrique d'un
disque céramique 79
4.5 Conclusion 80
Conclusion générale et perspectives
81
Bibliographie 83
Annexes 93
Annexe A : Notions fondamentales d'élasticité
94
Annexe B : Piézoélectricité et
matériaux piézoélectriques 96
Annexe C : Analogie électro-acoustique 101
Annexe D : Modèles unidimensionnels et hypothèses
102
Annexe E : Photographies 104
Annexe F : Fonctions de Bessel de première espèce
105
Liste des figures
1.1 Illustration des effets piézoélectriques [12]
~~~. ~~~~ .~~~~ ~ ~ 6
1.2 Organisation des différentes classes cristalline [24]
.......... ..................... ... 7
1.3 Représentation
schématique de l'apparition de la piézoélectricité
: (a) Cristal centro-
symétrique (ou isotrope), (b) Cristal non
centrosymétrique (ou anisotrope) [33] ~ 8
1.4 Microstructure typique
d'une surface céramique polie qui illustre les grains monocri-
stallins, joints de grains et pores [31] ..........
...................... ... 13
1.5 Représentation de la structure
pérovskite de PZT:(a) cubique (T=Tc), (b) tétragonale
(T<Tc) [46] ............................................ ....
.............................. ... 14
1.6 Microstructure d'une céramique PZT montant les
domaines ferroélectriques [42,46] 15
1.7 Représentation du
processus de polarisation dans une céramique ferroélectrique
(a) Domaines aléatoirement distribués avant la
polarisation, (b) application
d'un champ électrique, (c) champ électrique
supprimé [20,46] ................ ... 15
1.8 Cycle d'hystérésis d'un matériau
ferroélectrique [48] ............. ............ ... 16
1.9 Diagramme
schématique d'un sphérolite montrant la disposition radiale de
ses lamel-
les cristallines et localisation des phases amorphes [56]
........................... ... 18
1.10 Schémas de connectivité pour un composite
à deux phases [19] ................. ... 20
1.11 Vue schématique d'un piézocomposite de
connectivité 1-3 [2] ....... .... ... 21
1.12 Modes de déformation principaux d'un matériau
piézoélectrique [47] ... ... 23
1.13 Déformation parasite par conservation du volume. Pour
une déformation longitudina-
le, la conservation du volume introduit un mode transversal
mécanique [42] ...~ 24
1.14 Transformateur piézoélectrique « Type de
Rosen » [60] ......... ............. ... 25
1.15 (a) Quelques valeurs
de puissances produites par le corps humain, (b) implantation
du matériel piézoélectrique dans une
chaussure et vue d'un convertisseur de remise
en forme de la tension [61] .......... .........
.................. .... ... 26
1.16 (a) déformation d'une poutre par
application d'une tension (b) bilame couplé à une
petite plaque métallique très fine [12] ..........
..................... .... ... 27
1.17 Principe d'une imprimante à jet d'encre [63]
....................................... ... 27
2.1 (a) Onde longitudinale, (b) Onde transversale [66] .........
.... ...... .... ... 30
2.2 Réflexion et réfraction d'une onde ultrasonore
sur une interface ............ .... ... 32
2.3 Constitution d'un capteur acoustique
piézoélectrique [73] .................. .... ... 35
2.4 Faisceau ultrasonore émis par un transducteur
piézoélectrique ...... .......... ... 36
2.5 Intensité acoustique sur l'axe du faisceau en
fonction de la distance au transducteur ... 36
2.6 Principe de
fonctionnement d'un transducteur capacitif : (a) Membrane au repos, (b)
Application d'une tension de polarisation continue, (c)
Superposition d'une tension
alternative, (c) application d'une pression acoustique [64,75]
....... ... ....... ... 37
2.7 Schéma de principe d'un transducteur
piézorésistif à membrane silicium [78] ~~ 38
2.8 Vue en coupe d'un dispositif impulsion-écho [6]
......... ................... ... ... 39
|
3.1
|
(a) Diagramme d'une céramique
piézoélectrique vibrant en épaisseur, (b) Le transd-
|
|
|
ucteur comme un système linéaire à trois
ports [19,81] ............ ... ...
|
42
|
|
3.2
|
Variation du coefficient de couplage en fonction de
«fr/fa » ... ...
|
45
|
|
3.3
|
Variation de la fréquence d'antirésonance en
fonction de l'épaisseur ............ ....
|
46
|
|
3.4
|
Courbe simulée de l'impédance ; (a) Module; (b)
Phase .......... ... ...
|
47
|
|
3.5
|
Courbes simulée et expérimentale de
l'impédance;(a) Module, (b) Phase ....... ...
|
48
|
|
3.6
|
Modèle de Mason d'un transducteur ultrasonore
piézoélectrique [86] ............ ...
|
50
|
|
3.7
|
Modèle KLM d'un transducteur ultrasonore
piézoélectrique [5] ......... ...
|
51
|
|
3.8
|
Modèle de Leach d'un transducteur ultrasonore
piézoélectrique [97] ...
|
52
|
|
3.9
|
Courbe simulée de l'impédance;(a)
Résistance, (b) Réactance ............ ... ...
|
54
|
|
3.10
|
Schéma électrique équivalent
simplifié du transducteur [93] ............... ...
|
55
|
|
3.11
|
Tracé théorique de l'admittance électrique
du transducteur : (a) Dans le diagramme
|
|
|
de Bode, (b) Dans le plan de Nyquist [94] ......................
... ... ...
|
57
|
|
3.12
|
Tracé simulé de l'admittance électrique: (a)
Dans le diagramme de Bode, (b) Dans le
|
|
|
plan de Nyquist .......... ... ...
|
58
|
|
3.13
|
Schéma électrique équivalent d'une ligne de
transmission de longueur dx ...........
|
60
|
|
3.14
|
Sous-circuit PSPICE du modèle de Leach [96]
...................... ... ...
|
63
|
|
3.15
|
Circuit PSPICE pour simuler l'impédance électrique
du transducteur ......... .....
|
63
|
|
3.16
|
Variation de l'impédance en fonction de la
fréquence:(a) Partie réelle (ou résistance)
|
|
|
;(b) Partie imaginaire (ou réactance)
................................................ ...
|
64
|
|
3.17
|
Courbes simulée et expérimentale de
l'impédance;(a) Résistance, (b) Réactance .~
|
65
|
|
4.1
|
Dimensions et système de coordonnées d'une plaque
céramique .............. ...
|
72
|
|
4.2
|
Dimensions et système de coordonnées d'un disque
céramique ................ ...
|
74
|
|
4.3
|
Courbe simulée de l'impédance électrique
d'une plaque céramique ............ .....
|
77
|
|
4.4
|
Courbe simulée de l'impédance électrique
d'un barreau céramique ............. ...
|
77
|
|
4.5
|
Courbe simulée de l'impédance électrique
d'un disque céramique .....................
|
78
|
|
4.6
|
Courbe simulée de l'impédance électrique
d'un cylindre céramique ......... ...
|
78
|
|
4.7
|
Courbes simulée et expérimentale de
l'impédance électrique d'un disque céramique
|
79
|
|
A
|
Notation des contraintes sur un volume élémentaire
....... ............... ....... ...
|
94
|
|
B.1
|
Cycle de fabrication des céramiques PZT par voie solide
[114] ...... .......... ...
|
97
|
|
B.2
|
(a) Coefficient de couplage électromécanique en
mode épaisseur. (b) permittivité
|
|
|
relative, en fonction de l'impédance acoustique [5]
....... .......... ...
|
97
|
|
E.1
|
Céramiques piézoélectriques PZT: plaques,
disques émaillés, anneaux, tubes,
|
|
|
rondelle, portions de sphères [39] ..........
...................... ................. ...
|
104
|
|
E.2
|
Film PVDF [119]
....................................................................... ...
|
104
|
|
E.3
|
Composites 1.3 fabriqués (sans métallisation
à gauche) [2] ....................... ...
|
104
|
|
E.4
|
Transducteurs ultrasonores piézoélectriques
[120,121] ....... ................... ...
|
104
|
|
F
|
Fonctions de Bessel de première espèce .......
................... ................ .....
|
105
|
Liste des tableaux
|
1.1
|
Équations de la piézoélectricité
|
9
|
|
1.2
|
Grandeurs électriques, mécaniques et
piézoélectriques
|
9
|
|
2.1
|
Principales applications des ultrasons en fonction de leur
fréquence ....
|
31
|
|
2.2
|
Vitesse de propagation des ultrasons dans les différents
milieux [65,67]
|
31
|
|
2.3
|
Valeurs de l'interface acoustique entre quelques milieux [64,67]
|
33
|
|
3.1
|
Comparaison des valeurs des fréquences théoriques
et expérimentales
|
49
|
|
3.2
|
Facteurs de couplage et vitesse acoustique théoriques et
expérimentaux .....
|
49
|
|
3.3
|
Paramètres du schéma électrique
équivalent simplifié
|
59
|
|
3.4
|
Paramètres du transducteur ultrasonore
piézoélectrique
|
66
|
|
3.5
|
Paramètres des milieux avant et arrière
|
66
|
|
3.6
|
Paramètres du circuit d'excitation électrique
|
66
|
|
4.1
|
Caractérisation tridimensionnelle: hypothèses et
principaux résultats [104]
|
71
|
|
4.2
|
Comparaison des valeurs de fréquences
d'antirésonance théoriques et expérimentales
|
80
|
|
A
|
Notation matricielle
|
95
|
|
B.1
|
Échantillons pour la caractérisation des modes de
déformations fondamentaux d'une
|
|
|
céramique piézoélectrique [39,115,116,117]
|
98
|
|
B.2
|
Caractéristiques des céramiques
piézoélectriques utilisées [108,116,118]
|
99
|
|
C
|
Analogie entre les grandeurs électriques et acoustiques
[5]
|
101
|
|
D
|
Caractérisation unidimensionnelle: hypothèses et
principaux résultats ..........
|
103
|
Principales notations, symboles et constantes
physiques
|
Symbole
|
Description
|
Unité
|
|
a
|
Rayon de la céramique piézoélectrique
|
m
|
|
a1,a2,a3
|
Dimensions géométriques de la céramique
piézoélectrique
|
|
A
|
Section de la céramique piézoélectrique
|
m2
|
|
ci7
|
Constante élastique
|
N.m-2
|
|
C
|
Capacité linéique
|
F.m-1
|
|
Cm
|
Capacité liée à l'élasticité
de l'élément vibrant
|
F
|
|
C0
|
Capacité statique du transducteur rigidement lié
|
|
C0
|
Capacité d'un disque en mode radiale (1D)
|
|
C0"
|
Capacité d'un barreau (1D)
|
|
di7
|
Constante de charge
|
C.N-1
|
|
Dt
|
Diamètre du transducteur
|
m
|
|
D1, D2, D3
|
Composantes du vecteur induction électrique
|
C.m-2
|
|
D0
|
Module du vecteur induction électrique
|
|
E
|
Terme relatif au mode en épaisseur
|
-
|
|
E1, E2, E3
|
Composantes du vecteur champ électrique
|
V.m-1
|
|
f
|
Fréquence caractérisant l'onde ultrasonore
|
Hz
|
|
fa
|
Fréquence d'antirésonance
|
|
fc
|
Fréquence centrale du matériau
piézoélectrique
|
|
fe
|
Fréquence de la source d'excitation
|
|
fP
|
Fréquences de résonance du circuit oscillant
parallèle
|
|
fr
|
Fréquence de résonance
|
|
fs
|
Fréquences de résonance du circuit oscillant
série
|
|
fL,
|
Fréquence d'antirésonance des modes latéraux
(3D)
|
|
fE
|
Fréquence d'antirésonance des modes en
épaisseur (3D)
|
|
F1, F2
|
Forces acoustiques sur les faces de la céramique
|
N
|
|
gi7
|
Constante de tension
|
V.m.N-1
|
|
G
|
Conductance linéique
|
S.m-1
|
|
hi7
|
Constante piézoélectrique
|
V.m-1
|
|
Ia
|
I ntensité acoustique sur l'axe du faisceau à une
distance z du transducteur
|
kg.m-1.s-2
|
|
Ia0
|
Intensité acoustique sur l'axe au niveau du
transducteur
|
|
Iai, Iar, Iat
|
Intensité de l'énergie incidente,
réfléchie et transmise
|
|
Im
|
Courant motionnel
|
A
|
|
1(x, t)
|
Courant d'entré de la ligne de transmission
|
|
1(x + dx,t)
|
Courant de sortie de la ligne de transmission
|
|
I3
|
Courant électrique d'excitation
|
|
kt
|
Coefficient de couplage électromécanique en
épaisseur
|
-
|
|
kerr
|
Coefficient de couplage électromécanique
effectif
|
-
|
|
kp
|
Coefficient de couplage électromécanique du mode
radial
|
-
|
|
L
|
Inductance linéique
|
H.m-1
|
|
L
|
Terme relatif aux modes latéraux
|
-
|
|
Lm
|
Inductance liée à la masse vibrante
|
H
|
|
NK
|
Rapport de transformation (modèle de KLM)
|
-
|
|
NM
|
Rapport de transformation (modèle de Mason)
|
N.V-1
|
|
N
|
Extension du champ proche d'un transducteur
piézoélectrique
|
m
|
|
Np
|
Constante de fréquence (Mode radial)
|
Hz. in
|
|
N1
|
Constante de fréquence (Mode latéral)
|
|
N5
|
Constante de fréquence (Mode de cisaillement)
|
|
N3a
|
Constante de fréquence (Mode barreau)
|
|
N3t
|
Constante de fréquence (Mode en épaisseur)
|
|
P
|
Polarisation
|
C.m-2
|
|
pa
|
Pression acoustique
|
W.m-2
|
|
Pa0
|
Pression initiale (z=0)
|
|
Q
|
Charge totale sur les électrodes
|
C
|
|
Qe
|
Facteur de qualité électrique
|
-
|
|
Qin
|
Facteur de qualité mécanique
|
-
|
|
R
|
Résistance linéique
|
Ù.m-1
|
|
R
|
Terme relatif aux modes radiaux
|
-
|
|
Rm
|
Résistance liée aux pertes par
déformation
|
|
|
R0
|
Résistance traduisant les pertes diélectriques
|
|
s
|
Opérateur de Laplace
|
-
|
|
sij
|
Compliance élastique
|
m2.N-1
|
|
Si;
|
Tenseur des déformations
|
-
|
|
Tc
|
Température de Curie
|
°C
|
|
Ti;
|
Tenseur des contraintes
|
N.m-2
|
|
ui
|
Vecteur de déplacement
|
m
|
|
va
|
Vitesse des ondes ultrasonores dans le milieu de propagation
|
m.s-1
|
|
vP3
|
Vitesse des ondes ultrasonores dans la céramique selon
l'axe de polarisation « x3»
|
|
vP
|
Vitesse des ondes ultrasonores dans la céramique selon une
direction quelconque dans le plan « x1-x2 »
|
|
vPr
|
Vitesse des ondes ultrasonores dans la céramique selon le
rayon « a » (cas d'un disque)
|
|
'
vP3
|
Vitesse des ondes ultrasonores dans la céramique selon
l'axe de polarisation « x3» (cas d'un barreau)
|
|
vel
|
Vitesse de propagation d'une impulsion sur une ligne de
transmission électrique
|
|
v1, v2, v
|
Vitesses de déplacements des particules
|
|
V3
|
Tension électrique d'excitation
|
V
|
|
V(x, t)
|
Tension d'entrée de la ligne de transmission
|
|
?? (x + dx , t)
|
Tension de sortie de la ligne de transmission
|
|
XK
|
Réactance (modèle de KLM)
|
|

??
|
Admittance électrique d'entrée du transducteur
|
S
|
|
z
|
Axe de propagation de l'onde ultrasonore
|
-
|
|
??
|
Impédance électrique du transducteur
|
Ù
|
|
Ze
|
Impédance caractéristique de la ligne de
transmission
|
|
????
|
Impédance acoustique de la céramique
métallisée
|
Rayl
|
|
??0
|
Impédance acoustique spécifique de la
céramique
|
|
??1
|
Impédance acoustique du milieu arrière (ou
backing)
|
|
??2
|
Impédance acoustique du milieu avant (ou milieu de
propagation)
|
|
??
|
Nombre d'onde dans la céramique selon une direction
quelconque dans le plan « x1-x2 »
|
rad.m-1
|
|
????
|
Nombre d'onde dans la céramique selon le rayon «
a » (cas d'un disque)
|
|
??3
|
Nombre d'onde dans la céramique selon l'axe de
polarisation «x3»
|
|
'
??3
|
Nombre d'onde dans la céramique selon l'axe de
polarisation «x3» (cas d'un barreau)
|
|
????
|
Coefficient d'atténuation
|
Np.m-1
|
|
??????
|
Atténuation linéique
|
|
??????
|
Coefficient d'atténuation dû aux pertes
visqueuses
|
|
??????
|
Coefficient d'atténuation dû à la conduction
thermique
|
|
??????
|
Déphasage linéique
|
rad. m-1
|
|
??????
|
Constante d'imperméabilité diélectrique
|
m.F-1
|
|
ã
|
Constante de propagation de la ligne de transmission
|
-
|
|
åij
|
Permittivité électrique
|
F.m-1
|
|
æ1, æ2 ,
æ
|
Déplacement de particules
|
m
|
|
ç
|
Coefficient de viscosité
|
-
|
|
èi, èr ,èt
|
Angle d'incidence, de réflexion et transmise de l'onde
ultrasonore
|
rad
|
|
????
|
Demi-angle de divergence du faisceau ultrasonore
|
|
ë
|
Longueur d'onde du milieu de propagation
|
m
|
|
ël
|
Longueur d'onde de la lame d'adaptation d'impédance
|
|
ëP
|
Longueur d'onde du matériau
piézoélectrique
|
|
??0
|
Longueur d'onde de la source d'excitation
|
|
ñ
|
Masse volumique du matériau
|
kg.m-3
|
|
????
|
Coefficient de réflexion
|
-
|
|
????
|
Coefficient de transmission
|
-
|
|
????
|
Coefficient de Poisson
|
-
|
|
ô
|
Temps de relaxation
|
s
|
|
ù
|
Pulsation
|
rad.s-1
|
|
dx
|
Longueur élémentaire
|
m
|
|
??????????
|
Tangente de l'angle de pertes diélectriques
|
-
|
|
??????????
|
Tangente de l'angle de pertes diélectriques
|
-
|
|
R?? ??~
|
Partie réelle de la variable x
|
-
|
|
I?? ??)
|
Partie imaginaire de la variable x
|
-
|
|
???? ??~
|
Fonctions de Bessel de premiere espèce d'ordre « n
» de la variable « x »
|
-
|
|
??, ??, ??)
|
Cordonnées cylindriques
|
-
|
L'acoustique recouvre plusieurs disciplines dont
l'élément commun est l'étude des ondes sonores, incluant
non seulement les sons audibles, mais aussi tous les phénomènes
vibratoires non audibles : infrasons et ultrasons [1].
Les transducteurs1 ultrasonores
piézoélectriques sont étudiés et
développés depuis de nombreuses années pour la
génération ou la détection des ondes acoustiques dans de
nombreux domaines tels que l'imagerie médicale et le contrôle non
destructif2 [2,3,4]. Ces deux domaines ont connu un
développement important ces dernières décennies. Les
nombreuses publications et innovations attestent que ces domaines ont
engendré un grand intérêt aussi bien en recherche que pour
le développement de produits commerciaux. Les transducteurs ultrasonores
piézoélectriques sont au coeur de ces innovations et leurs
performances sont régulièrement améliorées afin
d'obtenir des images ou des contrôles de meilleure qualité.
L'aptitude d'un transducteur ultrasonore à satisfaire les exigences de
l'application envisagée est conditionnée en grande partie par les
performances électroacoustiques de sa partie active. Cette fonction de
conversion étant généralement réalisée par
un matériau piézoélectrique, dont les performances
intrinsèques doivent être choisies en fonction de l'application
[5].
La modélisation a toujours été
très importante pour la conception de transducteurs ultrasonores
piézoélectriques. Grâce à la connaissance du
modèle précis, un dispositif qui vérifie les
spécifications souhaitées peut être conçu de
façon rapide [6].
Le travail effectué au cours de ce mémoire a
pour objectif la modélisation unidimensio- nnelle et tridimensionnelle
d'un transducteur ultrasonore piézoélectrique et simulation du
transducteur avec PSPICE, afin de pouvoir le caractériser et
optimiser.
1 Le transducteur est un dispositif qui transforme une forme
d'énergie en une autre. Le transducteur relatif à la
transformation d'énergie électrique en énergie acoustique
et vice-versa est appelé transducteur électro-acoustique. L'une
des principales applications du transducteur est le capteur. La
différence entre le capteur et transducteur est souvent très
légère : Le transducteur est l'élément «
mesureur » ; Le capteur est l'élément protecteur qui
contient le transducteur, il assure parfois également une part du
conditionnement. En pratique, on fait souvent l'amalgame entre les deux notions
[6,7].
2 La méthode de contrôle non-destructif (CND) par
ultrason permet la détection et localisation de défauts dans le
volume d'une pièce sans l'altérer [8].
Ce mémoire est réparti en quatre chapitres dont
nous présentons brièvement les lignes principales ci-après
:
Le premier chapitre est consacré à la description
des propriétés de la piézoélectricité,
à la présentation des différents matériaux
piézoélectriques et de leurs caractéristiques.
Le second chapitre présente les différents types de
transducteurs ultrasonores et leurs principes de fonctionnement.
Le troisième chapitre est consacré à la
modélisation unidimensionnelle et simulation avec PSPICE d'un
transducteur ultrasonore piézoélectrique.
Le quatrième chapitre traite la modélisation
analytique tridimensionnelle d'un transduct- eur ultrasonore
piézoélectrique.
Nous terminerons ce mémoire par une conclusion
générale qui englobera l'ensemble des travaux effectués et
les perspectives envisagées pour la continuité de ce travail.
Chapitre 1
Principes fondamentaux de la
piézoélectricité
|
Sommaire
|
|
|
|
|
1.1 1.2 1.3 1.4 1.5 1.6
|
Introduction ..
Historique de la piézoélectricité
Effet piézoélectrique
Symétrie et piézoélectricité
Équations de la piézoélectricité
Caractéristiques électriques et mécaniques
des matériaux piézoélectriques .
|
4 4 6 6 8 10
|
|
1.6.1
|
Permittivité « åij » ..
|
10
|
|
1.6.2
|
Compliance élastique « sij » ..
|
10
|
|
1.6.3
|
Constante de charge piézoélectrique « dij
» ..
|
10
|
|
1.6.4
|
Constante de tension piézoélectrique «
gij » ..
|
11
|
|
1.6.5
|
Coefficient de couplage électromécanique « kij
» .
|
11
|
|
1.6.6
|
Facteur de qualité « Q » .
|
11
|
|
1.7
|
Les matériaux piézoélectriques
|
12
|
|
1.7.1
|
Les principaux matériaux piézoélectriques
.
|
12
|
|
1.7.2
|
Autres matériaux piézoélectriques ..
|
20
|
|
1.7.3
|
Choix du matériau piézoélectrique .
|
22
|
|
1.8
|
Modes de déformation d'un matériau
piézoélectrique
|
22
|
|
1.8.1
|
Modes de déformation fondamentaux .
|
23
|
|
1.8.2
|
Autres modes de déformation .
|
24
|
|
1.9
|
Quelques applications des matériaux
piézoélectriques
|
24
|
|
1.9.1
|
Transformateurs piézoélectriques .
|
24
|
|
1.9.2
|
Chaussures piézoélectriques .
|
25
|
|
1.9.3
|
Actionneurs bilames
|
26
|
|
1.9.4
|
Imprimantes à jet d'encre ..
|
27
|
|
1.10
|
Conclusion
|
28
|
1.1 Introduction
Les matériaux intelligents s'imposent aujourd'hui dans
les secteurs les plus divers, allant du bâtiment aux équipements
sportif en passant par la biomédecine, la robotique ou le secteur
militaire [9]. Le terme « matériau intelligent » indique
généralement un matériau capable de modifier
spontanément un ou plusieurs de ses propriétés physiques,
par exemple sa forme, sa connectivité, sa viscoélasticité
ou sa couleur, en réponse à des excitations naturelles ou
provoquées venant de l'extérieur ou de l'intérieur du
matériau : variations de température, contraintes
mécaniques, champs électriques ou magnétiques. Le
matériau va donc adapter sa réponse, signaler une modification
apparue dans l'environnement et dans certains cas, provoquer une action de
correction. Un matériau intelligent est sensible, adaptatif et
évolutif. Il possède des fonctions qui lui permettent de se
comporter comme un capteur (détecter des signaux), un actionneur
(effectuer une action sur son environnement) ou parfois comme un processeur
(traiter, comparer, stocker des informations). Les matériaux les plus
populaires sont : les alliages à mémoire de forme (AMF), les
matériaux piézoélectriques, électrostrictifs et
magnétostrictifs [10].
Dans ce chapitre nous allons rappeler les définitions,
les propriétés et les équations associées à
la piézoélectricité. Nous présentons
également les grandes familles de matériaux
piézoélectriques en détaillant plus
particulièrement les zircono titanates de plomb (PZT). Puis,
après avoir cité les différents modes de
déformation d'un matériau piézoélectrique, nous
présentons quelques applications des matériaux
piézoélectriques.
1.2 Historique de la
piézoélectricité
L'observation qualitative du phénomène
piézoélectrique a été faite au milieu du XIXe
siècle (1817) par un minéralogiste français l'abbé
René Just Haûy (d'après ses théories
cristallographiques) [11,12]. Ce fondateur de la cristallographie a en effet
par ses observations de la matière (étude systématique de
la morphologie générale des cristaux) apporté de grandes
connaissances au niveau de la géométrie atomique des cristaux et
participé à en déterminer des lois structurales.
La piézoélectricité a été
mise en évidence à Paris en 1880 par les frères Pierre et
Jacques Curie. Ces derniers montrèrent que les cristaux de quartz,
topaze, tourmaline, niobate de lithium, cane à sucre et sel de Rochelle
génèrent une polarisation électrique sous contraintes
mécaniques c'est à dire la production d'une charge
électrique sous contraintes mécaniques [13,14]. Cette
découverte attira immédiatement l'attention des scientifiques :
le français Gabriel Lippmann (1845-1921), Prix Nobel de physique en 1908
et inventeur de la photographie couleur, démontra de son
côté l'année suivante que le phénomène
était réversible et déduira mathématiquement du
principe fondamental de la thermodynamique la théorie des cristaux
piézoélectriques ; ainsi si des signaux électriques sont
appliqués sur le cristal, celui-ci se dilate et se comprime dans une
certaine direction, sa résonance mécanique favorisant les
vibrations à une fréquence donnée. C'est grace à
cette dernière propriété que le quartz a atteint une telle
notoriété [11,15]. Immédiatement les frères Curies
confirmèrent l'existence de l'effet piézoélectrique
inverse. Ils apportèrent une preuve
quantitative de la réversibilité complète de
la déformation électro-élasto-mécanique dans les
cristaux piézoélectriques.
La piézoélectricité n'était qu'une
curiosité de laboratoire mais la première guerre mondiale
(1914-1918) la fit entrer dans la voie des applications pratiques. En 1917,
Paul Langevin eut l'idée d'exciter des lames de quartz par un signal
électrique alternatif pour créer des ultrasons ; ceux-ci,
réfléchis sur la coque des sous-marins ennemis, retournent vers
d'autres cristaux piézoélectriques et y font naître des
tensions électriques alternatives aisées à
détecter. Ce générateur d'ondes ultrasonores « Sonar
» est la première utilisation conjuguée des effets
piézoélectriques direct et inverse. Cependant, cette invention ne
s'est pas perfectionnée jusqu'à la fin de la guerre [16,17].
Le succès du sonar a stimulé l'activité
intense de développement sur toutes sortes de dispositifs
piézoélectriques, résonnant et non-résonnant.
Walter G. Cady, en 1918, réalisa le premier oscillateur
électronique stabilisé par un cristal de quartz [11]. Il
établit le schéma électrique équivalent du
résonateur piézoélectrique. Dès lors, la
piézoélectricité devint l'associée de
l'électronique naissante. Elle permit la génération de
fréquences électriques, donc d'échelles de temps,
extrêmement stables.
La Seconde Guerre mondiale vit naître l'industrie
moderne de la piézoélectricité. Cinquante millions de
résonateurs à quartz piézoélectriques furent alors
fabriqués aux ÉtatsUnis. A la même époque furent
étudiés : des cristaux synthétiques, parfois
décevants à l'usage ; mais surtout certaines céramiques,
dites ferroélectriques, rendues anisotropes par un champ
électrique au cours de leur élaboration et présentant
ensuite un effet piézoélectrique intense [17].
En 1954, les zircono titanates de plomb (PZT) ont
été élaborés, et se sont répandus
très rapidement, car leurs propriétés supplantent de loin
celles de toutes les autres familles de composés [12].
En 1969, Kawai a été le premier à
découvrir les remarquables propriétés
piézoélectriques du polyvinylidène difluoré (PVDF).
Ce polymère piézoélectrique est le plus
étudié et utilisé [18].
Depuis le début des années 80, différents
nouveaux matériaux piézoélectriques ont été
élaborés. En particulier les composites
piézoélectriques qui ont vu jour peu après l'apparition du
titanate de barium comme céramique piézoélectrique lorsque
les chercheurs du Naval Research Laboratory ont voulu intégrer le
titanate de barium dans une matrice de polymère afin d'obtenir un
hydrophone flexible. D'autres tentatives ont consisté à combiner
des poudres de PZT avec un polymère, toujours afin d'obtenir des
matériaux piézoélectriques flexibles. Les premières
communications montrant le potentiel de ces matériaux pour les
applications sous-marines ont déclenché l'attrait des chercheurs
pour les composites piézoélectriques, notamment à
Pennsylvania State University [19,20].
1.3 Effet piézoélectrique
La piézoélectricité, du grec
"piézo" signifiant presser ou serrer [21], certains matériaux
(cristaux, céramiques ou polymères) ont la
propriété de se polariser sous l'influence d'une contrainte
mécanique : c'est l'effet piézoélectrique direct. Cette
polarisation est proportionnelle à la contrainte et change de signe avec
elle. Ce phénomène est réversible : une polarisation
électrique résultant de l'application d'un champ
électrique entraînera une déformation du méme
matériau. On parle alors d'effet piézo-électrique inverse
[22,23] (cf. figure 1.1).
L'application d'un champ électrique variable (champ
électrique alternatif) entre les faces d'un matériau
piézoélectrique, va exciter une onde acoustique dans le
matériau. Cette onde acoustique est la résultante d'une
déformation mécanique (déformation variable) du
réseau cristallin qui oscille alors à une fréquence
donnée, dite fréquence de résonance et c'est typiquement
l'application exploitée dans les oscillateurs à quartz
[24,25].
Générateur
de tension
Effet piézoélectrique inverse

D
E
F
O
R
M
A
T
I
O
N
Apparition
de charges
Effet piézoélectrique direct
Mat6riau
piezo6lectrique
C O N T R A
I N T E
Fig. 1.1 - Illustration des effets
piézoélectriques [12]
1.4 Symétrie et
piézoélectricité
L'effet piézoélectrique a été mis
en évidence principalement dans les solides cristallins anisotropes
(absence de centre de symétrie dans la maille cristalline) [27,28,29].
En cristallographie, on classe toutes les structures répertoriées
selon 32 classes de symétrie définies comme étant toutes
les combinaisons distinctes possibles entre les éléments de
symétrie que sont les plans, les axes et les centres de symétrie.
Onze de ces classes sont dites centrosymétriques et ne peuvent donc pas
présenter des propriétés polaires ou aucune polarisation
spontanée. L'une des 21 autres classes (la classe cubique 432)
possèdent des éléments de symétrie lui interdisant
de présenter des caractéristiques polaires. Les 20 classes
restantes possèdent au moins un axe polaire et les matériaux
qu'elles caractérisent peuvent donc posséder des
caractéristiques polaires telles la
piézoélectricité, la
pyroélectricité3 et la
ferroélectricité4 [30,31].
3 Les cristaux pyroélectriques ont une polarisation
électrique spontanée qui dépend de leur température
; ils portent en surfaces des charges électriques proportionnelles
à cette polarisation et de signe contraire sur les faces opposées
[34].
4 Les cristaux ferroélectriques possèdent un moment
dipolaire (polarisation permanente) électrique même en l'absence
d'un champ électrique extérieur [35].
La Figure 1.2 précise la place qu'occupent les
matériaux piézoélectriques dans la hiérarchie des
solides cristallins.
32 Classes cristallines
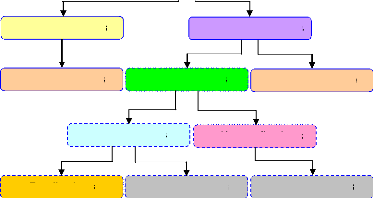
11 Centrosymétriques
21 Non centrosymétriques
Non piézoélectriques
20 Piézoélectriques
1 Non piézoélectrique
10 Pyroélectriques
10 Non pyroélectriques
Ferroélectriques
Non ferroélectriques
Non ferroélectriques
Fig. 1.2 - Organisation des différentes classes
cristalline [24]
A l'échelle cristalline, la
piézoélectricité se manifeste par une polarisation de la
maille tandis qu'à l'échelle de la maille, ce sont les
propriétés de symétrie des cristaux qui déterminent
leur caractère piézoélectrique ou non. Tout corps
présentant un centre de symétrie ne peut pas être
piézoélectrique alors que les cristaux ne possédant pas de
centre de symétrie peuvent l'être [32].
Un cristal possédant un centre de symétrie ne
peut pas être déséquilibré électriquement et
par conséquent il ne peut pas avoir de propriété
piézoélectrique (cf. figure 1.3.a) [33]. En effet, lorsqu'il est
soumis à une contrainte (flèches jaunes ou vertes), le
déplacement des charges positives et négatives est identique dans
toutes les directions et par conséquent la structure reste
équilibrée (i.e. on observe toujours le même centre de
symétrie).
Maintenant, si ce cristal ne possède pas de centre de
symétrie les phénomènes présentés sur la
figure 1.3.b peuvent être observés. Notons que cette structure de
cristal est formée par deux triangles équilatéraux dont
les sommets disposent de charges positives pour l'un et négatives pour
l'autre. Tant que le cristal n'est soumis à aucune contrainte, les deux
centres des triangles équilatéraux sont identiques et on ne
dispose d'aucun effet piézoélectrique. Dès lors qu'une
contrainte est appliquée, soit suivant X, soit suivant Y, les centres
des deux triangles équilatéraux se déplacent en sens
inverse et déséquilibrent la structure du cristal. L'effet
piézoélectrique est lié à cette possibilité
de déséquilibrer la structure et par conséquent, seuls les
cristaux dont la structure ne possède pas de centre de symétrie
sont piézoélectriques. De plus, comme on peut le constater les
deux centres se déplacent suivant
l'axe des X quelque soit la contrainte appliquée
(suivant Y ou suivant X). Par conséquent l'axe des X est appelé
axe électrique et l'axe des Y est appelé axe mécanique.
Perpendiculairement à ces deux axes se trouve l'axe des Z qui lui sera
appelé l'axe optique car des techniques optiques sont utilisées
pour le localiser. De plus il n'y a aucun effet piézoélectrique
qui soit associé à l'axe optique.
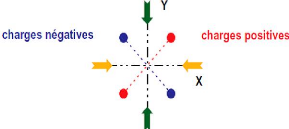
(a)
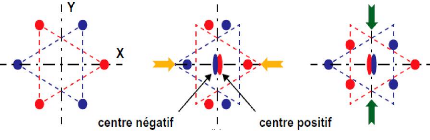
(b)
Fig. 1.3 - Représentation schématique de
l'apparition de la piézoélectricité : (a)
Cristal
centrosymétrique (ou isotrope), (b) Cristal non
centrosymétrique (ou anisotrope) [33]
1.5 Équations de la
piézoélectricité
L'effet piézoélectrique est la
conséquence d'un couplage entre le comportement électrique et
mécanique d'un matériau piézoélectrique. Lorsque le
phénomène de la pyroélectricité est
négligeable (i.e. l'effet thermique est négligeable), l'effet
piézoélectrique peut se traduire par les 8 équations
fondamentales reliant les grandeurs électriques (champ électrique
"E" et induction "D") aux grandeurs mécaniques
(contrainte "T" et déformation "S") comme
indiqué dans le tableau 1.1 [20,36].
|
Variables indépendantes
|
Type
|
Relation piézoélectrique
|
Forme
|
|
T,E
|
Extensives
|
S=sE . T + d
??.E
D=d .T + å T.E
|
Forme-d
|
|
S,D
|
Intensives
|
T=cD . S -h ??.D
E=-h. S
+â1S .D
|
Forme-h
|
|
T,D
|
Mixtes
|
S=sD.T +g ??.D
E=-g.T +
âT.D
|
Forme-g
|
|
S,E
|
Mixtes
|
T=cE. S .E -
et .
D=e. S + åS.E
|
Forme-e
|
Tab. 1.1 -- Équations de la
piézoélectricité
Le tableau 1.2 récapitule les différentes grandeurs
électriques, mécaniques et piézoélectriques ainsi
que leurs significations.
|
Symbole
|
Signification
|
Unité
|
Dimension
|
|
D
|
Déplacement électrique ou induction
|
C/m2
|
(3×1)
|
|
E
|
Champ électrique
|
V/m
|
|
å
|
Permittivité électrique
|
F/m
|
(3×3)
|
|
â
|
Constante d'imperméabilité diélectrique
|
m/F
|
|
S
|
Déformation relative
|
--
|
(6×1)
|
|
T
|
Contrai nte mécanique
|
N/m2
|
|
s
|
Compliance ou susceptibilité élastique
|
m2/N
|
(6×6)
|
|
c
|
Raideur ou constante élastique
|
N/m2
|
|
d
|
Coefficient piézoélectrique traduisant la
proportionnalité entre l'induction et la contrainte à champ
électrique constant
|
C/N
|
(3×6)
|
|
e
|
Coefficient piézoélectrique traduisant la
proportionnalité entre l'induction et la déformation à
champ électrique constant
|
C/m2
|
|
g
|
Coefficient piézoélectrique traduisant la
proportionnalité entre la contrainte et le champ résultant
à induction constante
|
V.m/N
|
|
h
|
Coefficient piézoélectrique traduisant la
proportionnalité entre la déformation et le champ
résultant à induction constante
|
V/m
|
Tab. 1.2 - Grandeurs électriques, mécaniques et
piézoélectriques
avec :
· X t est la transposé de la
matrice X.
· XE indique que la grandeur X
est considérée à champ électrique constant.
· XD indique que la grandeur X
est considérée à induction électrique
constante.
· XT indique que la grandeur X
est considérée à contrainte constante.
· XS indique que la grandeur X
est considérée à Déformation constante.
Remarques :
· Le coefficient piézoélectrique d (ou
e,g,h ) est identique pour le comportement électrique et le comportement
mécanique du matériau piézoélectrique. Ceci
signifie que la piézoélectricité requiert l'interaction
entre ces deux comportements.
· Comme cas particulier, si le matériau est non
piézoélectrique (d=e=g=h=0), le comportement électrique et
le comportement mécanique sont découplés.
1.6 Caractéristiques électriques et
mécaniques des maté- riaux piézoélectriques
Les matériaux piézoélectriques
possèdent des performances différentes d'un matériau
à un autre. Pour quantifier ces performances, plusieurs coefficients
sont définis. Parmi eux, nous citerons :
1.6.1 Permittivité << åij »
La permittivité « åij » d'un
matériau piézoélectrique détermine la charge par
unité de surface due au champ électrique appliqué [37,38].
Elle est suivie de deux indices. Le premier indice désigne la direction
du déplacement électrique ; le second celui du champ
électrique.
· åij T est la permittivité à
force constante caractérisant un échantillon libre.
· åij S est la permittivité à
déformation constante caractérisant un échantillon
encastré.
1.6.2 Compliance élastique << sij »
La compliance élastique « sij» est
définie comme le rapport de la déformation relative sur la
contrainte mécanique appliquée [39]. Elle est suivie de deux
indices. Le premier indice désigne la direction de la déformation
relative ; le second celui de la contrainte mécanique.
· sij E est la compliance à champ
électrique constant.
· sij D est la compliance à
déplacement électrique constant.
1.6.3 Constante de charge piézoélectrique
<< dij »
Le coefficient de charge « dij» est la
constante de proportionnalité entre le déplacement
électrique et la contrainte mécanique (ou la déformation
relative et le champ électrique). Il est suivi de deux indices. Le
premier indice désigne la direction du déplacement
électrique (ou du champ électrique) ; le second celui de la
contrainte mécanique (ou déformation relative). Puisque la
contrainte induite dans un matériau piézoélectrique par
application d'un champ électrique est le produit de la valeur du champ
électrique et de la valeur du coefficient de charge, les
matériaux piézoélectriques qui se caractérisent par
des coefficients de charges élevés sont plus souvent
utilisés comme actionneurs que comme capteurs [37,40].
1.6.4 Constante de tension piézoélectrique
<< gij >>
Le coefficient de tension « ?????? » est la
constante de proportionnalité entre le champ électrique et la
contrainte mécanique (ou la déformation relative et le
déplacement électrique). Il est suivi de deux indices. Le premier
indice désigne la direction du champ électrique (ou du
déplacement électrique) ; le second celui de la contrainte
mécanique (ou déformation relative). Puisque le champ
électrique induit dans un matériau piézoélectrique
par application d'une contrainte mécanique est le produit de la valeur
de la contrainte mécanique et de la valeur du coefficient de tension,
les matériaux piézoélectriques qui se caractérisent
par des coefficients de tension élevés sont plus souvent
utilisés comme capteurs que comme actionneurs [37,40].
1.6.5 Coefficient de couplage
électromécanique << kij >>
Un matériau piézoélectrique est
caractérisé dynamiquement par son coefficient de couplage
c'est-à-dire sa capacité à transformer l'énergie
électrique en énergie mécanique et réciproquement.
Cette transformation d'énergie est utilisée dans les capteurs et
actionneurs à base de matériaux piézoélectriques.
Ce paramètre est toujours inférieur à 1 parce que la
conversion d'énergie est toujours inachevée [40,41]. Il
s'écrit :
Énergie transformée
kij 2=
Energie appliquée
Le coefficient de couplage peut s'exprimer en fonction des
paramètres électromécaniques du matériau et selon
le mode de déformation considéré [37]:
dij 2
kij 2= E (1.1)
åij T sij
1.6.6 Facteur de qualité << Q >>
Pour les matériaux piézoélectriques,
nous définissons deux facteurs de qualité qui permettent de
mesurer l'influence des pertes diélectriques et mécaniques
[24,42,43]. Le facteur de qualité mécanique «
Qm» est relié à la résistance «
Rm », la capacité « Cm
», l'inductance « Lm » et la pulsation
« ?? » tel que :
Qm=
|
1 Lmù
= (1.2)
RmCmù Rm
|
|
Ce paramètre est égal aussi au rapport de la
fréquence centrale sur la largeur de bande :
fc
Qm= (1.3)
f2- f1
avec :
· fc est la fréquence centrale
du matériau piézoélectrique.
· f1 et f2 sont les
fréquences à -3dB en dessous et au dessus de
fc.
Le facteur de qualité électrique «
Qe » qui correspond au rapport entre la
capacité ??0 du matériau piézoélectrique et la
résistance R0 symbolisant les pertes diélectriques tel
que :
1
Qe= R0C0ù (1.4)
Ces facteurs aussi appelés facteurs de surtension
donnent le taux d'amplification de la structure à la résonance
mécanique ou électrique. En effet, les matériaux
piézoélectriques peuvent résonner électriquement ou
mécaniquement. Ces fréquences de résonance ne sont pas
forcément confondues. Un facteur de qualité élevé
traduit un amortissement de la structure faible et donc une minimisation des
pertes.
1.7 Les matériaux
piézoélectriques
1.7.1 Les principaux matériaux
piézoélectriques
Les matériaux piézoélectriques peuvent se
regrouper en trois classes principales : les cristaux, les céramiques et
les polymères.
1.7.1.1 Les cristaux
piézoélectriques
Le quartz et la tourmaline sont sans doute les cristaux
naturels les mieux connus découverts respectivement par Matthias et
Aurivillus en 1949. Ils ont des caractéristiques stables dans le temps,
mais ils présentent des impédances acoustiques relativement
élevées et des coefficients de couplage très faibles.
Ainsi qu'il faut couper les cristaux le long de certaines directions
cristallographiques, ce qui limite le nombre possible de figures
géométriques. Il existe d'autres monocristaux
synthétisés en laboratoire comme le niobate de lithium (LiNbO3)
ou le tantalate de lithium (LiTaO3) qui affichent des valeurs de coefficient
plus élevées. Le coût élevé et la
fragilité de ces cristaux expliquent qu'on ne les retrouve que
très peu dans les produits actuels [43].
Il est actuellement possible de fabriquer de nombreux
monocristaux de même composition que les céramiques, mais les
techniques mises en jeu sont délicates et coûteuses. Il s'agit de
cristaux « nouveaux » de type (1-x)PMN-xPT et (1-x)PZN-xPT. Ces
derniers présents des propriétés extraordinaires par
rapport aux céramiques piézoélect- riques ou cristaux
naturels. Par rapport aux meilleures céramiques de PZT (les plus
utilisés des matériaux ferroélectriques), le gain en terme
de couplage atteint un facteur 3 en mode latéral, et les coefficients
piézoélectriques dépassent 2000pC/N alors qu'ils sont
limités à 700pC/N pour les céramiques les plus douces. Par
exemple, la composition 0,67PMN0.33PT présente de forts coefficients
??33(2500pC/N) et ??33(>0.9). À présent, ces matériaux
bénéficient d'importants efforts de recherche dans leurs
procédés d'élaborations et de
caractérisations, car ils pourraient remplacer dans des
applications d'actionneurs et de capteurs, les céramiques PZT
[18,44].
1.7.1.2 Les céramiques
piézoélectriques
1.7.1.2.1 Généralités
Le terme céramique évoque souvent des objets
rustiques comme des poteries, des briques et des tuiles, mais le terme de
céramique signifie plus généralement un solide qui n'est
ni un métal ni un polymère. Une céramique est un
matériau solide de synthèse qui nécessite souvent des
traitements thermiques pour son élaboration. La plupart des
céramiques modernes sont préparées à partir de
poudres consolidées (mise en forme) et sont densifiées par un
traitement thermique (frittage). Les procédés de fabrication des
céramiques sont ajustables afin de pouvoir adapter leurs
propriétés diélectriques, mécaniques et
piézoélectriques à la demande. La plupart des
céramiques sont des matériaux polycristallins, c'est à
dire comportant un grand nombre de microcristaux bien ordonnés (grains)
reliés par des zones moins ordonnées (joins de grains) comme
illustré en figure 1.4 [31,21].
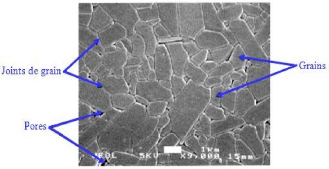
Fig. 1.4 - Microstructure typique d'une surface
céramique polie qui illustre les grains
monocristallins, joints de
grains et pores [31]
Les céramiques piézoélectriques sont
apparues dans les années quarante. Par leurs coefficients
piézoélectriques bien supérieurs à ceux des
cristaux, elles ont permis un élargissement des applications du
phénomène de piézoélectricité. Les
céramiques piézoélectriques sont incontestablement les
matériaux les mieux adaptés à l'heure actuelle. Ils sont
souvent utilisés tels quels, mais entrent également dans la
fabrication des composites que nous décrivons plus loin.
La famille des céramiques
piézoélectriques comporte de nombreux éléments,
citons entre autres, les titanates de baryum (BaTiO3) qui sont les
ancêtres des céramiques actuelles, les Zircono
Titanates de Plomb, d'où leur
appellation abrégée PZT, qui sont les plus répandus et qui
comptent à eux seuls cinq à six compositions différentes
[29,30].
On distingue ainsi deux familles de céramique : les
céramiques dites douces et celles dites dures, selon la propension que
présente le matériau à se dépolariser [43]:
· Les matériaux doux sont
généralement utilisés dans les applications à bas
niveau d'excitation, notamment détecteurs (hydrophones, sondes
échographiques...). Ils présentent en effet des couplages
électromécaniques et des permittivités
élevées.
· Les applications de puissance (piézomoteurs,
transducteurs pour nettoyage par ultrasons...) nécessitent l'utilisation
de céramiques dures pour leurs faibles pertes mécaniques et
diélectriques.
1.7.1.2.2 Les zircono titanates de plomb (PZT)
1.7.1.2.2.1 Structure et polarisation des PZT 1.7.1.2.2.1.1 Structure des
PZT
Le matériau PZT, de formule générale Pb
(ZrxTi1-x)O3 cristallise dans la structure de type pérovskite
ABO3. Au dessus d'une certaine température appelée
température de Curie " Tc ", c'est dans le
système cubique que les PZT cristallisent (cf. figure 1.5.a). La
polarisation du milieu est nulle, car dans chaque maille, le barycentre des
charges positives correspond à celui des charges négatives.
À des températures inférieures à Tc, une distorsion
de la maille cubique apparaît. Les barycentres des charges positives et
négatives ne sont plus confondus. Ceci a pour conséquence un
dipôle et une structure tétragonale (cf. figure 1.5.b) [35,45].
(a) (b)
Fig. 1.5 - Représentation de la structure
pérovskite de PZT : (a) cubique (T=Tc),
(b)
tétragonale (T<Tc) [46]
1.7.1.2.2.1.2 Polarisation des PZT
>
Processus de polarisation
Les PZT sont des céramiques polycristallines
ferroélectriques. Ils sont formés de grains et de joints de
grains. Chaque grain est divisé en domaines au sein desquels les
dipôles sont orientés dans la même direction. Chaque domaine
présente une polarisation microscopique spontanée, mais leur
répartition dans le matériau est aléatoire : le
matériau est donc globalement non polaire. La frontière entre les
domaines est appelée mur de domaine (cf.
figure 1.6). Pour que le matériau ferroélectrique
devienne piézoélectrique, on doit le polariser [12,47].
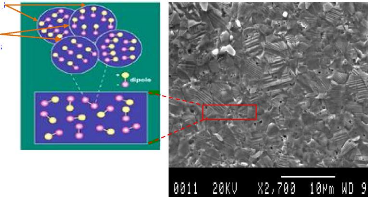
Domaines
Murs de domaines
Fig. 1.6 - Microstructure d'une céramique PZT montant
les domaines
ferroélectriques [42,46]
L'orientation des domaines dans une direction donnée
par application d'un champ électrique intense est une étape
importante. Après cette étape et lorsque le champ est
supprimé, une polarisation rémanente et une déformation
rémanente subsistent dans le matériau et le matériau
devient piézoélectrique (cf. figure 1.7).
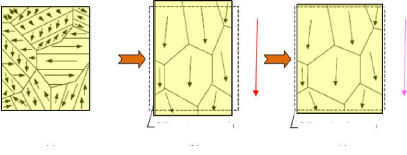
Champ el ectrique
Pol ari sdi on remanente
Déformation provoquée par le champ
électrique
(a) (b)
Déformation rémanente
(c)
Fig. 1.7 - Représentation du processus de polarisation
dans une céramique ferroélectrique : (a) domaines
aléatoirement distribués avant la polarisation, (b) application
d'un champ électrique, (c) champ électrique supprimé
[20,46]
> Cycle d'hystérésis
Si un champ extérieur suffisamment intense est
appliqué au matériau, il se polarise : les domaines,
orientés dans le sens du champ, grossissent au détriment des
autres. Plus le champ n'est élevé, plus le nombre de
dipôles orientés est grand, ce qui contribue à
l'augmentation progressive de la polarisation. Ce phénomène se
manifeste par un cycle d'hystérésis P=f(E) (cf. figure
1.8). P représente la polarisation moyenne de l'ensemble des
domaines et E est le champ extérieur appliqué au
matériau ferroélectrique. La polarisation est saturée
à #177;Ps pour des valeurs de champ très importantes et
la polarisation rémanente #177;Pr correspond à la valeur
de la polarisation à champ nul. La valeur du champ à polarisation
nulle est le champ coercitif noté Ec qui définit un
nouvel axe de polarisation [12,22,30].
P
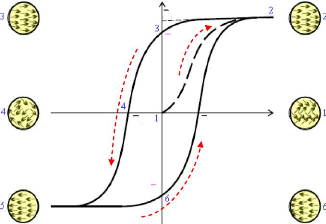
E
Ec
-Ec
Ps
Pr
-Pr
Fig. 1.8 - Cycle d'hystérésis d'un
matériau ferroélectrique [48]
> Température de Curie
La polarisation rémanente induite par orientation des
dipôles n'est stable que dans un domaine de température
donné. Au-delà de la température de Curie "
Tc", il se produit une transition de phase. Le
matériau passe de l'état ferroélectrique à
l'état paraélectrique et il ne présente plus alors l'effet
piézoélectrique. Cette température est l'un des
critères de choix de céramiques piézoélectriques ;
en fait, plus le point de Curie est grand, plus la gamme en température
d'utilisation de la céramique est importante [12,49].
1.7.1.2.2.2 Matrice plasto-pipzo-diplectrique des PZ
T
La matrice élasto-piézo-diélectrique
décrit le comportement électromécanique global d'une
céramique piézoélectrique. Pour les PZT qui sont
assimilables aux cristaux de la classe de symétrie 6mm du système
hexagonal, cette matrice s'écrit [50,51]:
d15
0
0 0 0 0
d15
0
0
0
0
0
d13
d13
d33
0
0
0
0
T E11
0
T E11
0
0
0
0
T
E33
0
0
0
T1
T2
T3
T4
. T5
T6
E1
E2
E3
S55
S55
S66
d15
0
0
0
0
d15
0
0
0
E
0
0
0 0 0 0
E
0
0 0 0 0 0
E
(1.5)
??1
S2
S3
S4
S5
S6
D1
D2
D3
|
|
SE
11
E
S12
E
S13
0
0
0
|
E SE
S12 13
E E
S11 S13
E E
S13 S33
0 0
0 0
0 0
|
|
|
1.7.1.2.2.3 Caractéristiques des
céramiques piézoélectriques PZT
Les avantages des céramiques PZT peuvent être
regroupés comme suit [34,52,53]:
· Possibilité d'usinage ou moulage dans une grande
variété de formes et de tailles.
· Coût abordable ; coefficient de couplage
électromécanique très élevé par rapport
à d'autres matériaux piézo-électriques. Cela
nécessite une application d'une énergie électrique moyenne
pour obtenir une énergie mécanique.
· Pertes électriques sont faibles, elles ne
s'échauffent donc presque pas et leur rendement acoustique est
très bon.
· Robustesse mécanique, elles peuvent supporter
des déformations beaucoup plus grandes que la plupart des autres
céramiques, c'est pourquoi on peut obtenir la même puissance, avec
un cristal de plus faible volume.
· Permittivités diélectriques relatives
fortes.
· Constantes de charges piézoélectriques
élevées.
· Température de curie ajustable selon la
composition.
A cause de leurs excellentes propriétés
piézoélectriques (bons coefficients de couplages
électromécaniques), les PZT sont largement utilisés dans
les capteurs et les actionneurs.
Leurs principaux inconvénients sont :
· Impédances acoustiques très
élevées par rapport à d'autres matériaux
piézoélectriques. Elles sont donc plus difficiles à
coupler aux autres matériaux.
· Coefficients pyroélectriques importants.
· Variation thermique des constantes
piézoélectriques et des permittivités
diélectriques.
1.7.1.3 Les polymères
piézoélectriques
1.7.1.3.1 Généralités
Le terme " polymère" signifie littéralement
« plusieurs parties». Les polymères solides peuvent être
divisés en deux catégories : amorphes et semi-cristallines. Le
polyfluorure de vinylidène "PVDF" étant un polymère
semi-cristallin, il présente une phase cristalline et une phase amorphe
[10,54,55,56].
· La phase amorphe est constituée de
chaînes moléculaires désordonnées, qui
représentent environ la moitié du volume du matériau et
déterminent l'essentiel de ses propriétés
mécaniques.
· La phase cristalline peut présenter quatre
structures distinctes dont trois polaires (â, ã, ä) et une
non polaire a.
La phase cristalline la plus fréquente est la lamelle
qui résulte des replis successifs de chaînes polymères sur
elles-mêmes. Une chaîne polymère peut participer à
plusieurs lamelles, de la même façon qu'une lamelle peut
être constituée de plusieurs chaînes différentes. Les
lamelles ont la possibilité de s'organiser en une structure
semi-cristalline nommée sphérolite (diamètre de l'ordre du
ìm). Les sphérolites sont constituées par un arrangement
radial des lamelles à partir d'un centre de nucléation. Bien que
les sphérolites soient une structure semi-cristalline, elles ne sont pas
elles-mêmes totalement cristallines. Il y a toujours, une phase amorphe
présente, notamment entre les lamelles constituant les
sphérolites (cf. figure 1.9).
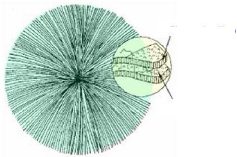
Phase cristalline
(Lamelle)
Phase amorphe
Fig. 1.9 - Diagramme schématique d'un sphérolite
montrant la disposition radiale de ses
lamelles cristallines et localisation
des phases amorphes [56]
Le polymorphe du PVDF le plus couramment obtenu est la phase
a. A partir de la structure cristalline a centrosymétriques, qui ne
présente pas de propriétés piézoélectriques,
on peut obtenir une structure cristalline non centrosymétriques
(â) par étirement uniaxial ou biaxial ou par compression sous
haute pression hydrostatique. La phase â présente la plus grande
activité piézoélectrique par rapport aux phases ã,
ä.
Quelle que soit la phase polaire obtenue, le moment dipolaire
de chacun des cristaux est orienté de façon aléatoire dans
le matériau, de sorte que la polarisation macroscopique est nulle.
Ainsi, pour obtenir une bonne activité piézoélectrique, le
PVDF orienté (en phase â) doit être polarisé
électriquement : il s'agit d'orienter la polarisation
ferroélectrique des cristaux suivant un champ électrique
appliqué perpendiculairement au plan du film. L'un des
procédés courants consiste à appliquer à haute
température (typiquement 80 a 130 oC), et pendant 15 a 120
minutes, un champ électrique proche (mais inférieur) au champ
coercitif maximal, de l'ordre de 30 a 120 V/ìm, entre les
électrodes métalliques déposées sur les faces du
film polymère. Il est à noter que les propriétés
piézoélectriques dépendent fortement de la polarisation
rémanente du matériau.
1.7.1.3.2 Origine de la
piézoélectricité dans le PVDF
Les origines physiques des propriétés
piézo-électriques de ce matériau sont restées
longtemps controversées [43]. De nombreux modèles ont
été avancés afin d'expliquer ces propriétés.
Le modèle couramment admis est celui de cristallites
ferroélectriques noyées dans une matrice amorphe. Il
apparaît que l'activité piézoélectrique de ces
matériaux provient à la fois :
· Des variations de leurs dimensions
géométriques dues à la contrainte ou à la
température.
· Des variations de la polarisation des cristallites dues
à la contrainte ou à la température.
· Des variations de permittivité dues à la
déformation.
1.7.1.3.3 Caractéristiques des polymères
piézoélectriques PVDF
Les films piézoélectriques PVDF présentent
plusieurs avantages [18,27,34]:
· Bonne flexibilité : possibilité
d'adaptation à des surfaces non planes et possibilité de
fabrications dans une variété de formes.
· Légèreté et coût abordable.
· Épaisseurs possibles de quelques
micromètres à une centaine de micromètres.
· Possibilité d'utilisation dans une large gamme de
fréquence s'étendant de 0,001 Hz à 109 Hz.
· Impédance acoustique faible, proche de celle de
l'eau, tissu humain et systèmes adhésifs.
· Coefficient de tension piézoélectrique
élevé.
· Haute stabilité : il présente une
très faible absorption d'humidité (inférieur à
0.02%) ainsi qu'une très bonne résistance aux agressions
extérieures (agents chimiques, oxydants, rayons ultraviolets et
radiations nucléaires).
· Possibilité de collage avec les adhésifs
commerciaux.
Leurs principaux inconvénients sont :
· Coefficients de couplage plus faible que celle des
céramiques piézoélectriques.
· Coefficients de charges piézoélectriques
plus faibles que celle des céramiques piézoélectriques.
· Constantes diélectriques plus faibles que celle
des céramiques piézoélectriques.
· Coefficients de pertes diélectriques plus
élevés que celle des céramiques
piézoélectriques.
1.7.2 Autres matériaux
piézoélectriques
D'autres matériaux piézoélectriques font
l'objet de recherche et de développement visant des applications plus
spécifiques compte tenu de leurs remarquables
propriétés.
1.7.2.1 Les composites
piézoélectriques
Le terme « composite » dans le domaine des
matériaux signifie que deux ou plusieurs matériaux sont
associés à l'échelle macroscopique afin de
développer un matériau ayant de nouvelles
propriétés [2]. Un composite piézoélectrique,
encore appelé piézocomposite par abus de langage, est la
combinaison d'une céramique piézoélectrique et d'un
polymère non piézoélectrique. Le fait d'associer plusieurs
constituants, appelés phases, permet de combiner leurs
propriétés physiques [57].
1.7.2.1.1 Classification
Les piézocomposites ont été
classés par Newnham suivant la connectivité de chacune de leurs
phases et on caractérise ainsi leur structure tridimensionnelle [19]. On
désigne un composite constitué de deux phases par deux entiers
"i-j" qui précisent le nombre de directions suivant lesquelles chaque
phase établit une liaison ou connectivité. Différentes
combinaisons sont décrites sur la figure 1.10.
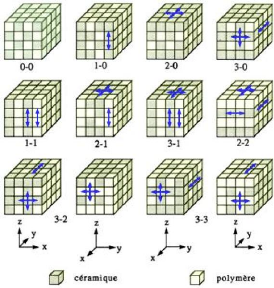
Fig. 1.10 - Schémas de connectivité pour un
composite à deux phases [19]
Si les piézocomposites ont pris de multiples formes,
les composites dits de connectivité 1-3, ont le plus retenu l'attention.
Un piézocomposite 1-3 se compose de barreaux ou fibres de PZT qui sont
arrangés en parallèle suivant la direction de polarisation et un
polymère constituant la matrice (cf. figure 1.11).
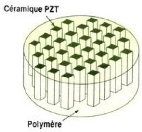
Fig. 1.11 - Vue schématique d'un piézocomposite de
connectivité 1-3 [2] 1.7.2.1.2 Caractéristiques des
piézocomposites 1-3
Les avantages d'un composite, en général, sont
de présenter de meilleures performances en de nouvelles
propriétés par rapport à ces constituants. Par exemple,
pour les piézocomposites 1-3, les propriétés essentielles
du composite sont [18,25,26]:
· Impédance acoustique se situe entre celle de la
céramique piézoélectrique et celui du polymère.
· Coefficient de couplage électromécanique
élevé.
· Le choix judicieux de ces constituants et de leur
fraction volumique permet d'ajuster son impédance électrique.
· Souplesse de mise en forme liée aux
propriétés thermiques et mécaniques du polymère.
· Les modes latéraux sont fortement
atténués et par conséquent les effets parasites
associés sont réduits.
1.7.2.2 Les couches épaisses
piézoélectriques
Depuis les années 70, l'industrie des microtechniques
a connu un essor très important. Les techniques de fabrication ont
évolué et ont ainsi permis une réduction du coût de
production. Aujourd'hui, de nombreuses applications intègrent des
dispositifs de taille réduite. En effet, les industries automobile,
aéronautique et biomédicale cherchent à miniaturiser et
alléger leurs produits tout en demandant une fiabilité accrue. La
demande est également très forte dans le domaine des
télécommunications ou de l'électronique grand public
[12].
Les couches épaisses sont une alternative
intéressante pour remplacer les céramiques massives amincies
traditionnellement employées dans les systèmes de petite taille.
Il permet la diminution de la taille de ces systèmes tout en offrant la
possibilité de les réaliser
rapidement par des techniques de fabrication collective. Des
épaisseurs d'une centaine de micromètres peuvent être
atteintes à partir d'usinages de céramiques massives. Pour
obtenir de plus faibles épaisseurs (plusieurs dizaines de
micromètres), une solution consiste à venir déposer le
matériau actif (films céramiques) sur un substrat comme
l'alumine. Viennent ensuite les étapes de dépôt de
l'électrode d'alimentation et de polarisation. Le coefficient ??33 est
inférieur à celui du même matériau en configuration
massique. La diffusion de l'électrode d'alimentation et la
porosité du matériau actif limitent les performances du
système couche+substrat.
1.7.3 Choix du matériau
piézoélectrique
La comparaison des caractéristiques de
matériaux piézoélectriques permet de choisir le
matériau le plus adapté à l'application visée. Pour
le transducteur ultrasonore piézoélectrique, c'est le
matériau piézoélectrique qui conditionne ses performances.
Donc alors le choix du matériau piézoélectrique devient
nécessaire.
Dans ce mémoire, les PZT ont été choisis,
car :
· Ils présentent des excellentes
propriétés piézoélectriques (surtout des bons
coefficients de couplage).
· Ils sont très utilisés dans les
équipements ultrasonores du commerce.
· On a suffisamment de propriétés
diélectriques, mécaniques et piézoélectriques de
ces matériaux qui sont nécessaires pour réaliser nos
simulations.
1.8 Modes de déformation d'un matériau
piézoélectrique
Le matériau piézoélectrique se
déforme dans différentes manières à
différentes fréquences. Ces diverses déformations
s'appellent les modes de déformation [58]. Du fait de l'anisotropie des
matériaux piézoélectriques, leur déformation se
fait selon une direction
privilégiée sous l'action d'un champ
électrique E . Une étude des propriétés de
ces matériaux nécessite donc une identification des directions.
La figure 1.12 illustre ces modes dans le cas d'un barreau
parallélépipédique de céramique
piézoélectriques. D'une manière générale,
une céramique piézoélectrique est
référencée par un trièdre (o,x1,x2,x3).
Par convention, la direction et le sens de la polarisation sont confondus avec
l'axe 3, pour un mode ië~, i correspond à l'axe
d'orientation du champ électrique appliqué et ë
à l'axe de la déformation mécanique
générée (i=1,2,3, ë=1,2,3,4,5,6)
[42,47,59].
1.8.1 Modes de déformation fondamentaux
1.8.1.1 Mode longitudinal {33]
Le mode longitudinale traduisant des déformations dans
la même direction que l'axe du champ électrique. Ce mode
possède un bon coefficient de couplage, cependant le placement des
électrodes sur les surfaces vibrantes les fragilise.
1.8.1.2 Mode transversal {31 ou 32]
Le mode transversale traduisant des déformations
perpendiculaires à l'axe du champ électrique. Dans ce mode, les
électrodes ne sont pas placées sur les surfaces subissant les
déformations, donc offrant l'avantage de ne pas soumettre les
électrodes à la contrainte. En revanche, il possède un
coefficient de couplage moindre que le mode longitudinal.
1.8.1.3 Mode cisaillement {15]
Le mode de cisaillement traduisant des déformations
perpendiculaires à la direction de polarisation ou autour d'un axe. La
céramique subit alors un phénomène de torsion autour de
l'axe choisi. Elle est obtenue lorsque le champ appliqué est
perpendiculaire à la polarisation du matériau. Par exemple, si le
champ est appliqué sur l'axe 1, la déformation se fera autour de
l'axe 2 (rotation associée à l'indice 5).
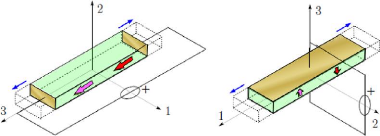
(a) Mode longitudinal {33} (b) Mode transversal {31 ou 32}
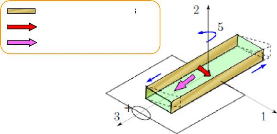
Position des électrodes Champ électrique
(E ) Polarisation (P )
(c) Mode de cisaillement {15}
1.8.2 Autres modes de déformation
D'autres modes de déformation « parasites »
résultant de la forme particulière de l'échantillon
peuvent apparaître [42]. Ils sont d'origine mécanique par exemple,
des déformations perpendiculaires à l'épaisseur (mode
radial traduit par le coefficient de Poisson comme présenté sur
la figure 1.13) ou d'origine électrique par déplacement dipolaire
(modification des parois de blocs). En jouant sur la forme de
l'échantillon (plaque, tube, ...) et sur sa polarisation (uniforme,
radiale,...), une grande variété de déformations peuvent
être exploitées. Il est à noter que lors de l'utilisation
d'une céramique piézoélectrique, plusieurs modes
interagissent simultanément. Ces modes parasites sont souvent
négligés : les dimensions des structures sont choisies pour que
ces hypothèses soient vérifiées. Par exemple, il est
préférable de privilégier une longueur nettement
supérieure à l'épaisseur pour utiliser le mode 33.
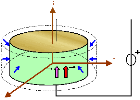
2
P
E
1
3
Fig. 1.13 - Déformation parasite par conservation du
volume. Pour une déformation longitudinale, la conservation du volume
introduit un mode transversal mécanique [42]
1.9 Quelques applications des matériaux
piézoélectriques
Nous allons à présent citer quelques applications
des matériaux piézoélectriques actuellement
développées.
1.9.1 Transformateurs piézoélectriques
Dans un transformateur électromagnétique,
l'énergie électrique d'entrée est convertie en
énergie magnétique, puis l'énergie magnétique est
reconvertie en énergie électrique de sortie. Le transformateur
piézoélectrique a un principe de fonctionnement analogue. Il
convertit l'énergie électrique d'entrée en une
énergie mécanique (i.e. ondes acoustiques) et puis reconvertit
l'énergie mécanique en une énergie électrique de
sortie [37,60].
Le transformateur piézoélectrique est une
combinaison d'un actionneur et d'un transducteur
piézoélectriques, qui servent de primaire et de secondaire
respectivement comme le montre la figure 1.14. L'actionneur convertit la
tension Ve en vibration mécanique, cette
dernière est ensuite reconvertie en tension Vs par
le transducteur. Le rapport de Vs sur
Ve dépend des dimensions géométriques,
facteur de couplage électromécanique, facteur de qualité
mécanique et la résistance de charge RL .
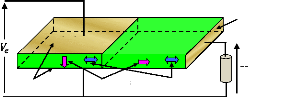
Electrode de sortie
Actionneur Transducteur
Vs
RL
Electrodes d'entrée
Polarisations
Contraintes
Le transformateur piézoélectrique a plusieurs
avantages par rapport au transformateur électromagnétique, tel
que le poids et le volume inférieurs, le meilleur isolement et l'absence
du bruit électromagnétique.

Fig. 1.14 - Transformateur piézoélectrique
« Type de Rosen » [60]
1.9.2 Chaussures piézoélectriques
Le corps humain stocke, dissipe et peut produire une
énergie considérable eu égard à la consommation de
nos appareils électroniques portables habituels. Il convertit de
l'énergie constamment (mouvements, respiration, chaleur...), et on peut
considérer qu'il s'agit d'une énergie renouvelable, gratuite, non
polluante et de durée de vie élevée (cf. figure 1.15.a).
Méme si, bien sûr, une faible part de cette énergie est
exploitable, il semble que l'énergie associée aux mouvements du
corps humain peut permettre d'approvisionner bon nombre d'applications et de
réduire, voire supprimer les problèmes de recharge et de
dépendance aux réseaux électriques ou aux piles. Cela
requiert de convertir en électricité une partie de
l'énergie dépensée, par des moyens à
déterminer en fonction des ressources, des solutions technologiques
envisageables et des besoins. Les dispositifs piézoélectriques
permettent de convertir en électricité l'énergie des
mouvements humains [61,62].
La figure 1.15.b montre une chaussure
piézoélectrique capable de convertir en électricité
l'énergie générée lors de la marche. Deux
dispositifs piézoélectriques sont implantés dans la
chaussure :
· Un dispositif formé de deux rubans
précontraints et incurvés de céramique PZT, placé
dans le talon. L'énergie récupérée (charge
adapté de 500kg) : 8.4mw.
· Une feuille de PVDF flexible, placée dans la
semelle, récupère l'énergie des mouvements de flexion
pendant chaque pas. L'énergie récupérée (charge
250kg) : 1.3mW.
Chapitre 1. Principes fondamentaux de la
piézoélectricité 26

(b)
(a)
Chaleur humaine 2.4-4.8W
(Tête seulement)
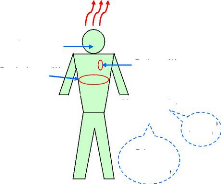
Respiration 0.42W
(0.83W)
Mouvements des
doigts 0.76-2.1mW
(6.9-19mW)
Souffler 0.4W
(0.83W)
Mouvements des
bras 0.33W
(60W) Puissance
fournie
Puissance
Calorifique
consommée
Pouls 0.37W
(0.93W)
Mouvement du
pied 5-8.3W
(67W)
Fig. 1.15 - (a) Quelques valeurs de puissances produites par
le corps humain, (b) Implantation du matériel
piézoélectrique dans une chaussure et vue d'un convertisseur de
remise en forme de la tension [61]
1.9.3 Actionneurs bilames
Les actionneurs à base des couches épaisses
piézoélectriques sont employés dans de nombreux
microsystèmes. L'actionneur bilame est le système le plus simple
: la couche épaisse piézoélectrique est
déposée sur un substrat [12]. Suivant le sens de la tension
appliquée, le substrat se déforme comme l'illustre la figure
1.16.a.
Quelques systèmes sont présentés avec des
céramiques massives de fine épaisseur. Pour remplacer les
ventilateurs rotatifs encombrants et bruyants, une équipe
américaine propose l'utilisation d'un bilame couplé à une
petite plaque métallique très fine pour ventiler certains
composants électroniques placés dans les ordinateurs. Ce bilame
est actionné grâce à deux céramiques massives
amincies à 300um environ, puis collées de chaque coté de
la plaque métallique à faire vibrer (cf. figure 1.16.b).
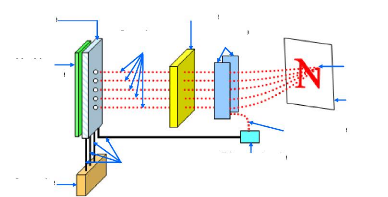
Générateur de
gouttelettes
Matériau
piézoélectrique
Cartouche
d'encre
Gouttelettes
d'encre projetées
Canalisations Récupération de
l'encre utilisée
Chargeur
électrostatique
Plaques de
déviation
Encre inutilisée
Formation
de l'image
Papier
+ V --
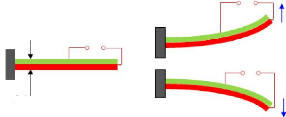
Couche de PZT
électrodée
Substrat
0 V
- V +
(a)

Plaque métallique
(a)
Fig. 1.16 -- (a) Déformation d'une
poutre par application d'une tension (b) Bilame couplé à
une
petite plaque métallique très fine [12]
1.9.4 ,P SUP DcNIs Ei jINEd9IcRIE
L'imprimante à jet d'encre est une imprimante sans
impact. Elle imprime ligne par ligne à l'aide d'une tête
d'impression montée sur un chariot mobile. Cette tete utilise de l'encre
qu'elle conserve dans un générateur d'encre. L'encre
stockée A dans une cartouche est amenée dans le
générateur d'encre par des canalisations. A l'arrière du
générateur se trouve un matériau
piézoélectrique qui permet de faire vibrer l'encre afin de le
propulser sous forme de gouttelettes à travers les buses (trous de la
tête de l'imprimante). Les gouttelettes d'encre (toutes de la meme
taille) passant par un chargeur électrostatique qui va les charger
positivement pour les faire dévier par deux plaques de déviation
traversées par un champ électrique, ce qui permet de projeter les
goulettes avec une grande précision sur le papier. Un caractère
est imprimé point par point, colonne par colonne (cf. figure 1.17)
[63].
1.10 Conclusion
Les principales propriétés de la
piézoélectricité, ainsi que les différents types de
matériaux piézoélectriques ont été
décrits dans ce chapitre. De cette étude, il ressort les points
suivants :
· Les propriétés de symétrie des
cristaux déterminent leur caractère piézoélectrique
ou
non. Un cristal présentant un centre de symétrie ne peut
pas être piézoélectrique.
· Chacun de matériaux
piézoélectriques dispose de caractéristiques
différentes qui conditionnent leur utilisation. Il faut donc faire un
choix judicieux en fonction des applications visées.
· Du fait de l'anisotropie des matériaux
piézoélectriques, ils se déforment selon des directions
privilégiées sous l'action d'un champ électrique.
Chapitre 2
Différents types de transducteurs
ultrasonores
Sommaire
2.1 Introduction . 30
2.2 Théorie des ultrasons .. 30
2.2.1 Définition et applications des ultrasons ...
30
2.2.2 Paramètres de l'onde ultrasonore 31
2.2.3 Interaction du faisceau ultrasonore avec la matière
... 32
2.3 Différents types de transducteurs ultrasonores et leurs
principes de fonc-
tionnement .. 34
2.2.1 Transducteur piézoélectrique 34
2.2.2 Transducteur capacitif 37
2.2.3 Transducteur piézorésistif 38
2.2.4 Transducteur impulsion-écho 38
2.4 Conclusion . 39
2.1 Introduction
Ce chapitre débute par une brève description de
la théorie des ultrasons. Nous présentons ensuite les
différents types de transducteurs ultrasonores et leurs principes de
fonctionnement, en détaillant le transducteur ultrasonore
piézoélectrique, qui fera par la suite l'objet de l'étude
de modélisation et simulation décrites dans ce mémoire.
2.2 Théorie des ultrasons
2.2.1 Définition et applications des ultrasons
Contrairement aux ondes électromagnétiques, les
ondes ultrasonores ont besoin d'un support matériel (i.e. les ultrasons
ne se propageant pas dans le vide) car elles sont liées au
déplacement des particules du matériau dans lequel elles se
propagent [65,66]. Parmi les différents types d'ondes, on distingue deux
modes d'ondes principaux :
· Les ondes longitudinales (ou ondes de compression)
pour lesquelles les vibrations des particules ont lieu parallèlement
à la direction de propagation de l'onde (cf. figure 2.1.a).
·
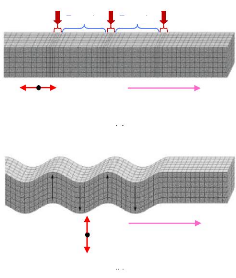
Compression
Compression
Compression
Direction de propagation
(a)
Direction de vibration
des particules
(c)
Direction de vibration
des particules
Direction de propagation
Expansion
Expansion
Les ondes transversales (ou ondes de cisaillement) pour
lesquelles les vibrations des particules ont lieu perpendiculairement à
la direction de propagation de l'onde (cf. figure 2.1.b).
Les ultrasons sont de même nature que les sons audibles,
mais sont inaudibles pour l'oreille humaine. Le domaine fréquentiel des
ultrasons s'étend de la frontière avec l'acoustique audible,
fixée arbitrairement à 16 kHz, jusqu'aux fréquences
d'agitation thermiques des molécules aux environs 1013 Hz. On
désigne aussi sous le terme d'hypersons les ultrasons dont la
fréquence est supérieure à 100 GHz [19].
Les principales applications des ultrasons sont
présentées dans le tableau 2.1 en fonction de la fréquence
de ces derniers.
|
Plage de fréquence
|
Applications
|
|
10-50kHz
|
Nettoyage, soudage, usinage, collage par ultrasons,
émulsification...
|
|
10-100kHz
|
Acoustique sous-marine, analyse des sous-sols
|
|
1-20MHz
|
Acoustique médicale, échographie, contrôle
non destructif
|
|
100MHz-10GHz
|
Acousto-optique, acousto-électronique
|
|
10-1000GHz
|
Étude de la matière
|
Tab. 2.1 - Principales applications des ultrasons en fonction de
leur fréquence
2.2.2 Paramqtres de l'onde ultrasonore
Cette section présente les différents
paramètres nécessaires à la caractérisation de
l'onde ultrasonore.
1.2.2.1 Longueur d'onde et vitesse de propagation
L'onde ultrasonore en déplacement dans un milieu
donné se caractérise par sa fréquence « f
» et sa longueur d'onde « ë ». Ces
deux caractéristiques permettent de déterminer la vitesse de
propagation des ultrasons va dans le milieu [65]:
va=ë f (2.1)
La vitesse de propagation des ultrasons dans la matière
dépend essentiellement des caractéristiques du milieu
(élasticité, densité). À titre d'exemple, quelques
vitesses de propagation des ultrasons dans différents milieux sont
répertoriées dans le tableau 2.2.
|
Milieu
|
va (m/s)
|
|
Acier
|
5900
|
|
Aluminium
|
6320
|
|
Os
|
3500
|
|
Caoutchouc
|
2300
|
|
Eau
|
1480
|
|
Air
|
334
|
Tab. 2.2 - Vitesse de propagation des ultrasons dans les
différents milieux [65,67]
1.2.2.2 Impédance acoustique
Le comportement du milieu vis-à-vis des ultrasons est
exprimé par une constante appelée impédance
acoustique5 Za. Elle est définie comme le
produit de la masse volumique et de la vitesse du son du milieu et
donnée par la relation suivante [67]:
Za=ñ va (2.2)
1.2.2.3 Pression et intensité acoustiques
La pression acoustique varie selon la fréquence de
l'onde ultrasonore. L'énergie délivrée dans le milieu
dépend de ces variations de pression qui soumettent les particules du
milieu à des mouvements vibratoires.
On définit l'intensité acoustique comme le flux
d'énergie acoustique traversant une unité de surface
perpendiculaire à la direction de propagation de l'onde par unité
de temps. Elle est reliée à la pression acoustique par la formule
suivante [43] :
où Pa et Ia sont
respectivement la pression et l'intensité acoustique.
2.2.3 Interaction du faisceau ultrasonore avec la
matière
1.2.3.1 Réflexion et réfraction
d'u4eI14d1 ultrasonore
Lorsqu'une onde ultrasonore rencontre une interface
séparant deux milieux de caractéristiques physiques
différentes, une partie de son énergie est transmise d'un milieu
à l'autre, alors que l'autre est réfléchi (cf. figure
2.2).
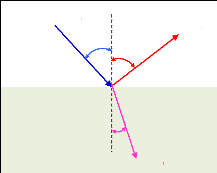
Milieu 1 ; Za1
Milieu 2 ; Za2
Onde incidente
èi
Onde transmise
èt
èr
Onde réfléchie
Fig. 2.2 - Réflexion et réfraction d'une onde
ultrasonore sur une interface
5 L'unité de mesure de l'impédance acoustique est
le : Rayl ; 1Rayl =1kg.m-2s-1; exemple pour l'air : 415
Rayls.
D'un point de vue énergétique, le coefficient de
réflexion «???? » et le coefficient de transmission
«????» peuvent être donné par les relations suivantes
[64,68,69]:
Iar
Iai
????=
et
Iat
Iai

???? =
2
(2.4)
Za2 cosèi-Za1 cos
èt
Za2 cos èi+Za1 cos
èt
4Za1
Za2cos2 èi
Za2 cos èi+Za1 cos
èt~2
(2.5)
où Za1 et Za2 sont
respectivement les impédances acoustiques des milieux 1 et 2;
èi , èr et
èt sont respectivement l'angle d'incidence, de
réflexion et transmise de l'onde ultrasonore ;
Iai, Iaret Iat représentent
respectivement l'intensité de l'énergie incidente,
réfléchie et transmise.
Si nous considérons que l'onde ultrasonore atteint
l'obstacle perpendiculairement
(èi=èr=èt=0 ). Les
coefficients de réflexion et transmission peuvent donc s'écrire
:
|
????=
|
Za2-Za1
|
2
|
(2.6)
|
|
et
|
Za2+Za1
|
|
|
????=1-????=
|
4Za1Za2
Za1+Za2)2
|
(2.7)
|
On constate que si les impédances acoustiques des deux
milieux sont très différentes l'énergie
réfléchie sera très élevée. C'est ainsi
qu'une couche d'air, meme très fine, dans le champ de propagation des
ultrasons agit comme un écran infranchissable. C'est pour cette raison
qu'il est nécessaire d'utiliser un milieu de couplage entre le
transducteur et le milieu dans lequel on souhaite faire propager l'onde
acoustique.
Dans le tableau 2.3 nous présentons quelques valeurs des
coefficients de réflexion et de transmission pour quelques interfaces
acoustiques typiques.
|
Milieu 1
|
Milieu 2
|
Za1 (MRayl)
|
Za2 (MRayl)
|
????(%)
|
????(%)
|
|
Air
|
Aluminium
|
0.00043
|
17.06
|
99.99
|
0.01
|
|
Air
|
Plexiglas
|
0.00043
|
4
|
99.99
|
0.01
|
|
Air
|
Muscle
|
0.00043
|
1.64
|
99.95
|
0.05
|
|
Air
|
Eau
|
0.00043
|
1.48
|
99.88
|
0.12
|
|
Eau
|
Aluminium
|
1.48
|
17.06
|
84.03
|
15.97
|
|
Eau
|
Plexiglas
|
1.48
|
3.30
|
38.08
|
61.92
|
Tab. 2.3 - Valeurs de l'interface acoustique entre quelques
milieux [64,67]
1.2.3.2 Atténuation d'une onde ultrasonore
L'atténuation d'une onde ultrasonore dépend
principalement de la fréquence considérée. Pour la plupart
des matériaux, plus la fréquence est haute plus
l'atténuation est importante. La theorie prevoit que l'attenuation est
directement proportionnelle au carre de la frequence pour une onde plane.
Considerons une onde plane se propageant suivant la direction
« z », la pression acoustique est donnee par la formule
[70]:
Pa =P??0exp(--???? z) (2.8)
oil P??0 est la pression initiale (z=0) et
as est le coefficient d'attenuation.
Pour les liquides, le coefficient d'atténuation est
donné par la relation [71]:
2çù2
????= 3ñva3 (2.9)
oil ç est le coefficient de viscosite et
ù est la pulsation.
2.3 Différents types de transducteurs
ultrasonores et
leurs principes de fonctionnement
2.3.1 Transducteur piézoélectrique
2.3.1.1 Structure d'un transducteur
piézoélectrique
Le transducteur piezoelectrique convertit l'énergie
électrique en énergie acoustique et inversement et son
fonctionnement fait appel à la piezoelectricite. Il est constitue de
trois elements de base qui sont : l'élément piezoelectrique, le
materiau absorbant (ou backing) et lame d'adaptation d'impédance (ou
lame quart d'onde) (cf. figure 2.3) [5,65,72].
> L'élément
piézoélectrique est généralement
composé d'un simple disque (ou plaque) de céramique
piézoélectrique qui permet la conversion d'un signal electrique
en vibration mecanique ou reciproquement.
> 3/1 %47,4i1M1Vs4VH/t est un
materiau dense et très attenuant sert d'amortisseur aux vibrations de
l'élément piézoélectrique après l'excitation
et absorbe également une partie de l'énergie rayonnée vers
l'arrière de l'élément piézoélectrique. Plus
l'impédance acoustique du materiau absorbant est proche de celle de
l'élément piezoelectrique, plus la quantite d'énergie
absorbee est elevee (amortissement fort), favorisant la création
d'impulsions courtes d'où une meilleure résolution
axiale6 du transducteur, au prix d'une dégradation de sa
sensibilite7.
6
La resolution axiale est le pouvoir de separer dans le temps des
ondes reflechies respectivement par deux reflecteurs très voisins situes
sur une direction axiale [1].
7 La sensibilité est l'aptitude de détecter des
réflecteurs, plus le signal qui est reçu de ces reflecteurs est
grand, plus la sensibilite est meilleure [73].
> Lame d'adaptation
d'impédance sert de protection contre les chocs
mécaniques et permet un transfert maximal de l'énergie issue de
l'élément piézoélectrique au milieu de propagation.
Elle peut agir aussi comme lentille acoustique focalisatrice placée en
avant de l'élément piézoélectrique et il sert
à modifier la géométrie du faisceau ultrasonore.
L'impédance acoustique de la lame d'adaptation d'impédance est
comprise entre celle de l'élément piézoélectrique
et celle du milieu de propagation permettant d'éviter une trop forte
réflexion du faisceau ultrasonore vers le transducteur. L'énergie
transmise sera maximale si l'épaisseur de lame d'adaptation
d'impédance est égale ël/4 (ël
étant la longueur d'onde de la lame à la fréquence de
fonctionnent du transducteur) et son impédance est égale à
la moyenne quadratique de l'impédance acoustique de
l'élément piézoélectrique et celle du milieu de
propagation.
Connecteur
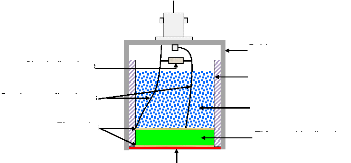
Circuit électrique
Conducteurs électriques
Electrodes
Elément piézoélectrique
Boitier
Housse isolante
Matériau absorbant
Lame d'adaptation
d'impédance
Fig. 2.3 - Constitution d'un capteur acoustique
piézoélectrique [73]
2.3.1.2 Description du faisceau ultrasonore émis
par un transducteur piézoélectrique
Le faisceau ultrasonore émis par un transducteur
piézoélectrique est constitué d'un lobe principal formant
un cône dans lequel la plus grande partie de l'énergie est
concentrée et de lobes secondaires d'énergie beaucoup plus faible
(cf. figure 2.4). Il comprend deux régions distinctes. La
première appelée zone de Fresnel (ou champ proche) où le
faisceau est quasiment cylindrique. La seconde appelée zone de
Fraunhofer (ou champ lointain) se caractérise par une divergence du
faisceau selon un demi-angle «????» par rapport à l'axe ??. La
limite entre les deux régions, pour un transducteur de diamètre
???? et de longueur d'onde ë dans le milieu de propagation, se
situe à une distance [73,74]:
????2
N??= 4ë (2.10)
L'angle de divergence est donné par la relation [72]:
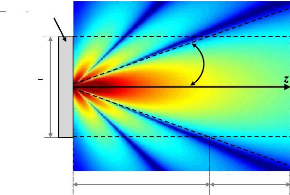
Transducteur
è??
D??
Champ proche Champ lointain
Fig. 2.4 - Faisceau ultrasonore émis par un transducteur
ultrasonore piézoélectrique
L'intensité acoustique le long de l'axe du faisceau
à une distance z du transducteur est donnée par la formule
suivante [74]:
2
Ia =Ia0 sin2 ð ë ???? 4
+z2-z ~ (2.12)
avec Ia0 est l'intensité acoustique
sur l'axe du faisceau au niveau du transducteur.
La figure 2.5 montre la variation sur l'axe de
l'intensité acoustique en fonction de la distance pour un transducteur
de 50 mm de diamètre vibrant à 0.76 MHz et rayonnant des ondes
acoustiques dans l'eau. Nous remarquons que l'intensité acoustique
décroît régulièrement dans la zone du champ lointain
à cause de la divergence de faisceau.
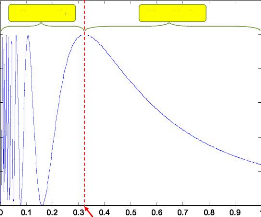
Champ proche
Champ lointain
Nt =0.32
2.3.2 Transducteur capacitif
Les transducteurs capacitifs (ou électrostatiques),
dans leur principe comportent deux armatures, une fixe et l'autre mobile,
séparées par une couche d'air. Le déplacement de
l'armature mobile peut-être provoqué soit par une pression
acoustique externe (ultrasons) si le transducteur fonctionne comme capteur,
soit par la tension électrique si le transducteur est utilisé
comme actionneur [6].
La figure 2.6 montre le principe de fonctionnement d'un
transducteur capacitif. Quand une tension statique (tension de polarisation)
est appliquée entre les deux armatures, la membrane est attirée
vers le substrat par la force colombienne. Quand un voltage alternatif est
superposé à la tension de polarisation, la membrane va se mettre
en mouvement et une onde ultrasonore est générée et
envoyée dans l'air [64]. De même en mode réception, si un
ultrason approche, la membrane va se déformer ce qui entraine la
variation de la capacité formée entre les deux armatures. En
conservant une charge électrique constante entre les armatures, la
tension électrique entre ces armatures varie selon le mouvement de
l'électrode mobile engendré par la pression acoustique.
Les transducteurs capacitifs possèdent les avantages
suivants : une faible sensibilité aux variations de température,
une grande sensibilité à la pression acoustique et une bonne
performance en terme de bruit [75,76].
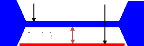
Armature
mobile
Cavité Armature
fixe
d
Substrat isolant
S b t t
(a) Pression
acoustique
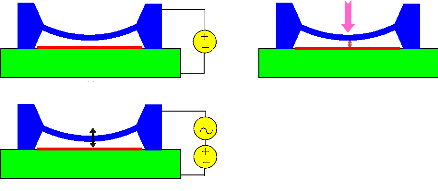
(b)
(d)
Déplacement
de l'armature
d-w
(f)
Fig. 2.6 - Principe de fonctionnement d'un transducteur
capacitif : (a) Membrane au repos, (b) Application d'une tension de
polarisation continue, (c) Superposition d'une tension alternative, (c)
application d'une pression acoustique [64,75]. d et w sont respectivement
la distance interarmatures et la déflexion de la membrane.
2.3.3 Transducteur piézorésistif
La piézorésistivité est la
capacité que possède un matériau à changer ses
propriétés de conductivité électrique lorsqu'il est
soumis à une contrainte mécanique [77]. Cet effet est surtout
utilisé dans les accéléromètres, les capteurs de
pression et également dans les capteurs ultrasonores dans le domaine de
mesure de distance ou la détection d'obstacle [64].
Les transducteurs piézorésistifs utilisent des
matériaux piézorésistifs comme le silicium monocristallin
ou polysilicium. Ces matériaux sont utilisés pour constituer des
résistances communément appelées jauges de contrainte. Les
transducteurs piézorésistifs sont idéalement
composés de 1,2 ou 4 jauges piézorésistives
diffusées, pour détecter avec la meilleure sensibilité les
contraintes longitudinales et transversales subies par le matériau. Sous
l'effet d'une pression acoustique, la membrane de silicium se déforme,
ce qui entraine la déformation des jauges piézorésistives
et par conséquent il apparait une variation de
résistivités à leurs bornes proportionnelle à la
déformation. Grâce à un pont de Wheatstone, il est
très simple de mesurer et traiter cette variation de résistance.
Donc alors on peut déterminer facilement la pression acoustique
appliquée sur la membrane de silicium (cf. figure 2.7) [78].
Les transducteurs piézorésistifs sont
extrêmement sensibles à la température (i.e. la valeur de
la résistance dépend de la température) et ne peuvent
fonctionner correctement sans l'addition de circuits de compensation
onéreux [75,76].
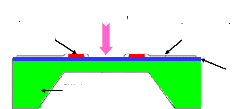
Silicium
Couche d'oxyde
Jauge
piézorésistive
Pression
acoustique
Interconnexion
en aluminium
Fig. 2.7 - Schéma de principe d'un transducteur
piézorésistif à membrane silicium [78]
2.3.4 Transducteur impulsion-écho
Le transducteur impulsion-écho utilise l'effet
piézorésistif pour la détection de l'onde acoustique, et
l'effet bimétallique8 pour la génération vu que
l'effet piézorésistif est irréversible [6,64].
La figure 2.8 illustre une vue en coupe d'un dispositif
contenant le transducteur impulsion-écho, ce dernier est formé
d'une plaque composée de plusieurs couches issues du
procédé de fabrication CMOS. La couche de nitrure de silicium
(Si3N4) est mécaniquement la plus importante. La couche de
polysilicium9 (SiO2) utilisée pour l'intégration
des
8 Effet bimétallique : une simple structure formée
de deux matériaux ayant des coefficients de dilatation différents
exerce, sous un changement de température, un déplacement dans le
sens perpendiculaire au plan de séparation de deux matériaux
[6].
9 Le polysilicium ou le silicium polycristallin est un
matériau déposé à basse pression et haute
température. Cependant, il se distingue du
silicium par sa structure
amorphe, puisque composé d'un agrégat de grains de silicium
formant ainsi un matériau non cristallin [77].
composants nécessaires pour le fonctionnement du
dispositif (résistances de chauffe, jauges piézorésistives
et thermopiles). La résistance de chauffe en polysilicium est
placée au centre de la membrane pour produire l'excitation
thermomécanique de celle-ci. La membrane encastrée à son
extrémité est déformée en flexion par le couplage
thermoélectrique dans le régime de génération. En
réception, la détection du mouvement de la plaque se fait par les
jauges piézorésistifs intégrées dans la couche de
polysilicium. On note aussi la présence de quatre thermopiles
placées entre le sommet et le centre de la membrane permettant de
mesurer la température moyenne au sein de la membrane.

Résistance de
chauffe
Thermopiles
Membrane
carrée
Jauges
piézorésistives
Fig. 2.8 - Vue en coupe d'un dispositif impulsion-écho
[6]
2.4 Conclusion
Dans ce deuxième chapitre, nous avons tout d'abord
décrit brièvement quelques définitions, et
propriétés physiques et applications des ultrasons. Nous avons
ensuite présenté les différents types de transducteurs
ultrasonores. Il s'agit de transducteurs : piézoélectrique,
capacitif, piézorésistif et impulsion-écho. Les
transducteurs : piézoélectrique et capacitif permettent la
détection et la génération des ultrasons par
l'exploitation de deux effets réversibles :
piézoélectrique et capacitif respectivement. Les transducteurs
piézorésistifs utilisent l'effet piézorésistif pour
la détection des ultrasons. Cependant, l'effet
piézorésistif est irréversible. Il faut donc
générer les ultrasons par un autre moyen. A cet effet, l'effet
bimétallique est utilisé par les transducteurs
impulsion-écho afin de générer les ultrasons.
Dans le chapitre suivant, nous allons présenter la
modélisation unidimensionnelle et la simulation d'un transducteur
ultrasonore piézoélectrique.
Chapitre 3
Modélisation unidimensionnelle et simulation
d'un transducteur ultrasonore
piézoélectrique
|
Sommaire
|
|
|
|
|
3.1
3.2
|
Introduction ............................................
.......... ............. .
Modélisation unidimensionnelle d'un transducteur
ultrasonore piézoélect-
rique....... ............... ................................
.... .............
|
41
41
|
|
3.2.1
|
Transducteur sans pertes ...............................
................
|
41
|
|
3.2.2
|
Transducteur avec pertes ...............................
................
|
52
|
|
3.3
|
Simulation d'un transducteur ultrasonore
piézoélectrique ................
59
|
|
|
3.3.1
|
Caractérisation de la ligne de transmission et analogie
électroaco-
|
|
|
|
stique......................
............................................
|
59
|
|
3.3.2
|
Sous-circuit PSPICE du modèle de Leach
.......................... .
|
62
|
|
3.3.3
|
Simulation de l'impédance électrique du
transducteur ....... ...
|
63
|
|
3.4
|
Conclusion
........................................................ ............. .
|
67
|
3.1 Introduction
La modélisation du transducteur ultrasonore
piézoélectrique est une étape nécessaire pour la
compréhension de son comportement, pour l'estimation de ses
caractéristiques et pour son optimisation [6].
Le succès de l'électronique moderne est
construit sur la possibilité de prédire avec précision le
comportement d'un système par le recours à des outils de
simulation. Ce paradigme peut être prolongé aux composants tels
que les transducteurs ultrasonores piézoélectriques associent
à leur électronique. La capacité de simuler le
transducteur ultrasonore piézoélectrique et leur
électronique rend possible l'ensemble des optimisations efficaces au
niveau de système réduisant la taille, le coût et la
consommation d'énergie [79].
Le présent chapitre est dédié à la
modélisation unidimensionnelle et à la simulation avec PSPICE
d'un transducteur ultrasonore piézoélectrique.
3.2 Modélisation unidimensionnelle d'un
transducteur
ultrasonore piézoélectrique
3.2.1 Transducteur sans pertes
3.2.1.1 Transducteur comme un système
linéaire à trois ports
Si le transducteur considéré comme une plaque
piézoélectrique assez large pour ne pas avoir de vibrations
parasites suivant les dimensions latérales, on utilise alors une
modélisation à une dimension, en ne considérant que l'axe
de propagation de l'onde ultrasonore : z. Ce type de modélisation
considère une plaque d'épaisseur « a3 »
composée d'une céramique piézoélectrique, avec
une électrode de chaque coté, à z = - a3/2 et
à z = a3/2, comme illustré sur la figure 3.1.a. Le
système mécanique considéré peut être
facilement mis en analogie avec un système électrique, ou
schéma équivalent. C'est pourquoi on peut considérer notre
transducteur comme un système linéaire à trois ports (ou
accès) (cf. figure 3.1.b) [19,80]:
· Un port électrique alimenté par une
intensité I3, sous une tensionV3.
· Deux ports acoustiques alimentés par les vitesses
v1 et v2 analogues à des intensités sous
l'action des forces F1 et F2 analogues à des
tensions.
Chapitre 3. Modélisation unidimensionnelle et
Simulation d'un transducteur ultrasonore piézoélectrique
42
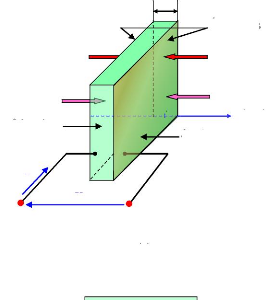
v2=- v (a3/2)
v1= v (-a3/2)
a3
Electrodes
F1= -AT (-a3/2) F2= -AT (a3/2)
Céramique
piézoélectrique
z (ou 3)
0
I3
V3
(a)
v1 v2
Section A


Port
acoustique
F1
Port
acoustique
F2
Transducteur

Port
électrique
I3
V3
(b)
Fig. 3.1 - (a) Diagramme d'une céramique
piézoélectrique vibrant en épaisseur, (b)
Le
transducteur comme un système linéaire à trois ports
[19,81]
Une excitation du port électrique, à l'aide
d'un générateur de tension, provoque une sollicitation
mécanique sous la forme d'une onde ultrasonore. Les deux ports
acoustiques représentent en fait les faces arrière et avant du
transducteur. L'effet inverse se traduit par une sollicitation mécanique
mettant le transducteur en résonance et excite le port
électrique.
3.2.1.2 Impédance électrique du
transducteur
3.2.1.2.1 Expression de l'impédance
électrique
En utilisant les équations de la
piézoélectricité (cf. § 1.5), on peut mettre en
relation les grandeurs électriques et mécaniques (cf. figure 3.1)
sous forme matricielle [82,83]:
??1
~ ??2 ~ = -?? ??3
|
????0?????? ??3??3
????0??????????(??3??3)
h33
|
????0?????????? ??3??3
????0??????
??3??3
h33
|
h33
??
h33
??
1
|
??11
??2 (3.1)
??3
|
|
?? ?? ????0
Dans le cas d'un transducteur (matériau
piézoélectrique métallisé d'impédance
Zp) ,dont on néglige l'épaisseur des électrodes
et chargé par deux milieux d'impédances Z1 et Z2 respixtivement
en face arrière et en face avant du transducteur, l'impédance
électrique d'entrée se calcule á partir de la matrice des
impédances (cf. équation (3.1)) [84] :
1
????0 ??
1 +
??
(3.2)
Id 2?? ?? 1 - cosö) ? j Z1 +
Z2)sinö
???? 2
- ???? + ??1??2)???????? + ??????(??1 +
??2)????????)
· ??0 est l'impédance acoustique spécifique
du matériau piézoélectrique.
· ??3 est le nombre d'onde associé à la
pulsation «ù» et á la vitesse des ondes ultrasonores
dans la céramique«????3» selon l'axe de polarisation
«x3» (??3 = ??/????3).
· L'angle ö est défini comme ?? = ??3??3.
· h33est la constante piézoélectrique.
· ???? est le coefficient de couplage
électromécanique en épaisseur.
· ??0 est la capacité statique du transducteur
rigidement lié (clampé) définie par [6] :
??33 ?? ??
??0 = (3.3)
??3
Remarque :
La relation (3.2) souligne l'importance de la constante
de couplage comme le principal paramètre piézo-électrique
caractérisant le transducteur. Il est aussi clair que le rapport
1/????0 module l'impédance électrique du transducteur en
fonction de la fréquence.
3.2.1.2.2 Caractérisation du
transducteur
Pour caractériser le transducteur, on peut utiliser
une configuration mécanique du type résonateur libre [80]. Dans
ce cas, le transducteur est sans charge avant et arrière (i.e.
Z1=Z2=0 ). L'impédance électrique s'écrit
d'après l'équation (3.2):
1 1 - ????2 tan ??/2~
(3.4)
?? = ??/2 ~
??????0
L'impédance tend vers l'infini (i.e. admittance ?? = 1/??
s'annule) pour chaque multiple de ???? , la fréquence
d'antirésonance :
????(??) = 2?? + 1)???? ; avec ???? = ????3 (2??3) et
?? ? N (3.5)
L'impédance s'annule (i.e. admittance tend vers l'infini)
pour les fréquences de résonances ????(??) avec ?? ? N, ce qui
d'après l'équation (3.4) nous donne :
(??) (??)
????2?????? ~?? ???? ~ = ?? ???? 2 fa
2 fa (3.6)
Le mode fondamentale est donné par ?? = 0 et les
harmoniques sont de fréquences multiples impaires de la fréquence
fondamentale.
Pour caractériser un transducteur, on mesure les
fréquences de résonance et d'antirésonance, ce qui donne
la vitesse acoustique et le coefficient de couplage
électromécanique ???? :
????3 = 2??????3 (3.7)
???? = ~?? ???? ?????? ?? ????-???? (3.8)
2 ???? 2 ????
Il est important de noter que l'épaisseur de la
céramique piézoélectrique fixe la fréquence
d'antirésonance et non la fréquence de résonance. La
fréquence de résonance est elle-même liée au
coefficient de couplage électromécanique du matériau
piézoélectrique.
En pratique, c'est la mesure des fréquences de
résonance et d'antirésonance qui fournit la valeur du coefficient
de couplage électromécanique [24]:
· Coefficient de couplage en fonction du
rapport Ir/Ia
La figure 3.2 montre la variation du coefficient de couplage
électromécanique en fonction du rapport «f??/f?? » (cf.
équation (3.8)). On peut observer que plus le rapport «f??/f??
» est faible (i.e. l'intervalle de fréquence entre la
résonance et l'antirésonance est élevé) plus le
coefficient de couplage est grand.
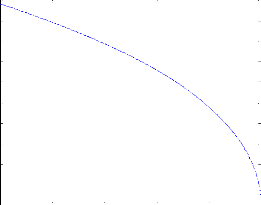
Fig. 3.2- Variation du coefficient de couplage en fonction de
«f??/f?? »
· Influence de l'épaisseur de la
céramique sur la fréquence
d'antirésonance
La figure 3.3 montre pour une céramique
piézoélectrique de type PZT503, l'évolution de la
fréquence d'antirésonance définie par l'équation
3.7. On comprend facilement qu'une montée en fréquence
nécessite une diminution de l'épaisseur. L'utilisation des
céramiques massives permet de couvrir une gamme de fréquence qui
s'étend du « kHz » à la centaine de « MHz ».
Pour des fréquences de l'ordre du « GHz », l'épaisseur
de la céramique s'amenuise à quelques microns. Donc alors, il est
nécessaire d'avoir recours à des couches (ou films)
piézoélectriques déposées par des techniques
relevant du domaine de la microélectronique, tout en gardant des
propriétés électromécaniques équivalentes
à celles obtenues par les procédés classiques.
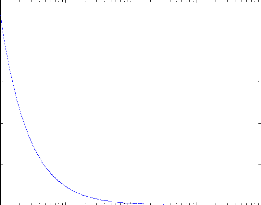
a3 (m)
Fig. 3.3 - Variation de la fréquence
d'antirésonance en fonction de l'épaisseur
Remarque :
Pour obtenir une puissance acoustique convenable, il faut
travailler dans des conditions de résonance. Pour cela, il faut choisir
la fréquence f0 de la source d'excitation de telle sorte que
l'épaisseur de la céramique piézoélectrique
soit [33]:
a3 = (2n + 1)
|
A0
2
|
= (2n + 1) Vp3 (3.10)
2f0
|
|
Le fondamental A0/2 est le plus
recherché, car il correspond aux pertes les plus faibles dans le
matériau piézoélectrique, puisque le parcours des ondes
acoustiques y est le plus réduit.
3.2.1.2.3 Simulation de l'impédance
électrique
La figure 3.4 montre, pour une plaque céramique de type
PZT503, la variation du module et phase de l'impédance en
fréquence. On constate que pour le mode de résonance fondamental
ils associent des modes parasites (ou partiels).
· Pour le mode fondamental, les fréquences de
résonances et d'antirésonances sont respectivement : 5.5MHz, 7.7
MHz.
· Pour les modes parasites :
- Les fréquences de résonances sont : 22.5 MHz, 38
MHz, 53.9 MHz, 69.1 MHz, 5 84.5 MHz.
- Les fréquences d'antirésonance sont : 23.1 MHz,
38.5 MHz, 53.9 MHz, 69.3 MHz, 84.7 MHz.
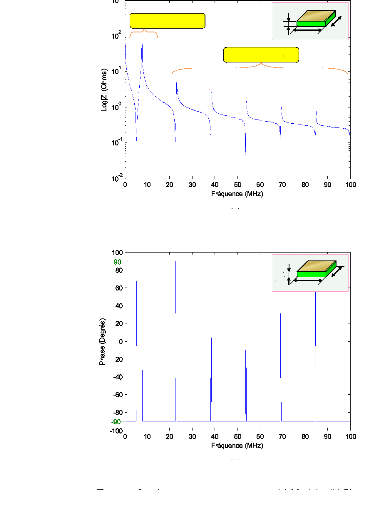
(a)
PZT503
20
mm
20
(b)
Fig. 3.4 - Courbe simulée de l'impédance ; (a)
Module; (b) Phase
0.3
mm
mm
PZT503
Mode fondamental
20
0.3
mm
mm
20
mm
????
Modes parasites
???? (1)
???? (2)
???? (3)
???? (1) ???? (2)
????
???? (3) ???? (4) ???? (5)
(5)
???? (4) ????
3.2.1.2.4 Validation des résultats de
simulation
Pour permettre la validation des résultats de
simulation précédents, les résultats expérimentaux
(courbe de l'impédance et celle de la phase) donnés dans la
référence [85] sont utilisés. La figure 3.5 illustre les
variations du module et phase de l'impédance en fonction de la
fréquence. Nous remarquons que la concordance entre les positions des
fréquences de résonance et d'antirésonance est bonne.
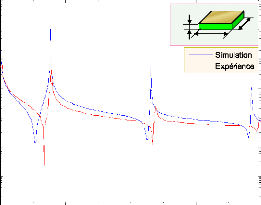
0.3
mm
20
PZT503
mm
mm
20
(a)
(b)
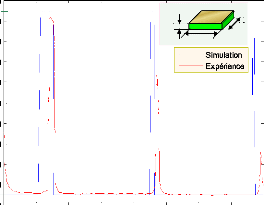
0.3
mm
20
PZT503
mm
mm
20
Les valeurs des fréquences de résonances et
d'antirésonances expérimentales sont comparées celles
issues de l'approche analytique et résumées dans le tableau 3.1.
Nous constatons que les fréquences expérimentales sont
cohérentes avec celles théoriques :
|
Fréquences (MHz)
|
Théorie
|
Expérimentale
|
Erreur relative (%)
|
|
????
|
5.5
|
6.9
|
20
|
|
???? (1)
|
22.5
|
23.5
|
4
|
|
???? (2)
|
38
|
39.3
|
3
|
|
????
|
7.7
|
7.9
|
2.5
|
|
???? (1)
|
23.1
|
23.8
|
3
|
|
???? (2)
|
38.5
|
39.7
|
3
|
Tab. 3.1 - Comparaison des valeurs des fréquences
théoriques et expérimentales
A partir des résultats précédents, le
facteur de couplage électromécanique et vitesse acoustique (cf.
équations : 3.7, 3.8 et 3.9) sont déduits et
récapitulés dans le tableau 3.2.
|
Paramètres
|
Théorie
|
Expérimentale
|
|
????
|
0.73
|
0.49
|
|
????3
|
4620
|
4740
|
Tab. 3.2 - Facteurs de couplage et vitesse acoustique
théoriques et expérimentaux
3.2.1.3 Schémas électriques
équivalents
Il est souvent pratique d'utiliser un schéma
électrique équivalent pour modéliser le comportement d'un
transducteur [19]. Il est plus facile alors d'analyser les interactions entre
le transducteur, les lames d'adaptation d'impédance et le milieu de
propagation, dès lors que l'on se ramène à un
schéma électrique équivalent familier. Divers
schémas équivalents sont connus tels que le modèle de
Mason, le modèle KLM et le modèle de Leach.
3.2.1.3.1 Schéma électrique
équivalent de Mason
Mason, dans les années 40, a démontré que
pour une analyse unidimensionnelle, la plupart des difficultés
rencontrées dans l'obtention d'une solution analytique de
l'équation (3.1) peuvent être surmontées en utilisant une
analogie avec des circuits électriques [6,18]. Il a
présenté le circuit analogique qui sépare un
matériau piézoélectrique dans un port électrique
relié par un transformateur électromécanique avec deux
portes acoustiques (cf. figure 3.6). La piézoélectricité
est prise en compte par le transformateur de rapport ???? = h33??0.
F2

v1 ZM1 ZM1 v2

B F
ZM2
F1
1:NM
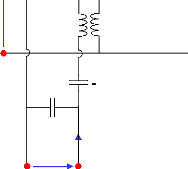
C0
C0
I3
E
V3
Fig. 3.6 -- Modèle de Mason d'un
transducteur ultrasonore piézoélectrique [86]. Les lettres
B, F désignent Back et Front
respectivement (c'est-à-dire la face arrière et la face avant du
transducteur) et la lettre E désignent Electrical port
(c'est-à-dire le port électrique du transducteur)
Les impédances ZM1 et ZM2 sont données par les
relations suivantes [81]:
|
ZM1 = ./Z0A tan
|
??3??3
|
)
|
(3.11)
|
|
2
|
ZM2 = --./Z0A casec(a3a3) (3.12)
3.2.1.3.2 Schéma électrique
équivalent KLM
Un des inconvénients du modèle de Mason repose
sur l'introduction du terme de la capacité négative qui n'a pas
de sens physique. Dans l'effort d'enlever cette capacité du circuit et
alimenter directement le centre de la structure mécanique par un
transformateur, Krimholtz, Leedom et Matthaei ont publié en 1970 un
modèle alternatif. Ce modèle se déduisant de
l'équation (3.1) est couramment appelé modèle KLM (cf.
figure 3.7). Il s'agit d'une ligne de transmission, qui traduit la propagation,
au centre de laquelle est injecté un courant à la sortie d'un
transformateur électromécanique dont le coefficient de
transformation varie en fonction de la fréquence [87,88].
Chapitre 3. Modélisation unidimensionnelle et
Simulation d'un transducteur ultrasonore
piézoélectrique 51
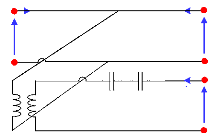
v1
F1 F2
E
XK C0 I3
V3
B
1:NK
F
v2
Fig. 3.7 - Modèle KLM d'un transducteur ultrasonore
piézoélectrique [5]
Le rapport de transformation « ??K » et la
réactance « XK » sont donnés par les relations
suivantes [85]:
|
NK =
|
Z0??0
cosec
2h33
|
??3??3
|
)
|
(3.13)
|
|
2
|
hi3 r
XK = sink.a3a3) (3.14)
Z0ik02
3.2.1.3.3 Schéma électrique
équivalent de Leach
La figure 3.8 montre le circuit équivalent de Leach
d'un transducteur ultrasonore piézoélectrique. Ce circuit
consiste en deux parties, une partie électrique (i.e. la capacité
entre les deux électrodes « C0 ») et une partie
mécanique (i.e. la ligne de transmission). Le couplage entre les deux
parties est réalisé par deux sources contrôlées
[79].
· La source de tension contrôlée dans
partie mécanique a la tension « h33.I3/s
», où s est l'opérateur de Laplace. Elle est commune
entre les deux ports de la ligne de transmission. Puisque la charge sur les
électrodes de transducteur est liée au courant par:
Q=I3/s, la tension de la source devient h33.Q .Donc
la source de tension est contrôlée par la charge sur les
électrodes.
· La source de tension contrôlée dans
partie électrique a la tension «h33. (v1 -- v2)/s ».
Puisque le déplacement de particules est lié à la vitesse
de particules par: c=v/s, la tension de la source devient
h33.(c1-c2). Donc la source de tension est
contrôlée par la différence entre les déplacements
de particules sur les deux faces du transducteur.
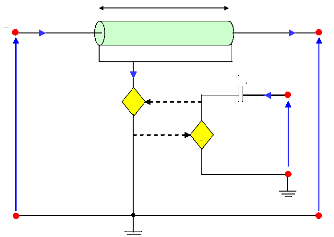
-I-
h33.(v1-v2)/s
-
v1 v2
B
F
v1-v2
h33.I3/s
-I-
-
C0
I3
F1
F2
E
V3
Fig. 3.8 - Modèle de Leach d'un transducteur ultrasonore
piézoélectrique [97]
Parmi d'autres chercheurs qui ont proposé des
modèles décrivant le comportement des transducteurs ultrasonores
piézoélectriques citons au moins les travaux de Redwood, Brown et
Carlson, Gonnard, Hsueh, Morris et Hutchens, Dion, Püttmer, Emeterio,
Hirsekon.
3.2.2 Transducteur avec pertes
La modélisation d'une façon précise d'un
système de transduction électromécanique exige l'ensemble
des propriétés électromécaniques pour chacun des
éléments constitutifs du système. La réponse
dynamique d'un tel système ne sera caractérisée avec
précision que si les propriétés
électromécaniques avec pertes pour chacun des
éléments constitutifs de ce système ont introduit dans le
modèle [89]. Le transducteur ultrasonore piézoélectrique
est soumis à un ensemble de pertes d'une grande importance lors de la
modélisation. Il s'agit notamment de pertes mécaniques et
diélectriques dans le matériau actif (i.e. céramique
piézoélectrique), pertes mécaniques dans les
matériaux passifs tels que le matériau absorbant et lame
d'adaptation d'impédance.
3.2.2.1 Différents types de pertes
3.2.2.1.1 Pertes diélectriques
Lors de leur fonctionnement, les céramiques
piézoélectriques dissipent une puissance non négligeable,
correspondant aux pertes d'origine diélectrique. Ces pertes se
traduisent sous forme de chaleur, ce qui, à terme, provoque la perte des
propriétés piézoélectrique [42]. Elles sont souvent
représentées au travers de la tangente de l'angle de pertes
diélectriques « ?????????? ». Dans ce cas, on définit
une permittivité complexe, dont la partie
imaginaire est fonction de ?????????? [90] :
??33??' = ??33?? 1 - ????????????)
(3.15)
où ??33??' et ??33?? sont
respectivement les permittivites de la ceramique avec et sont pertes.
3.2.2.1.2 Pertes mécaniques
Les pertes mecaniques, qui sont une consequence de la
propagation de l'onde acoustique dans les materiaux actifs ou passifs et sont
dues aux frottements internes generes dans ces materiaux. Elles sont
quantifiées par la tangente de l'angle de pertes mécaniques
??????????. Dans ce cas, on definie une constante elastique complexe dont la
partie imaginaire est fonction de ?????????? [91] :
??33??' = ??33?? 1 + ????????????)
(3.16)
où ??33??' et ??33?? sont
respectivement les constants elastiques de la ceramique avec et sont pertes.
3.2.2.2 Impédance électrique avec pertes
du transducteur
3.2.2.2.1 Expression de l'impédance
électrique avec pertes
Pour modeliser les pertes dans le transducteur (resonateur
libre), nous introduisons les parties imaginaires des paramètres
complexes (equations (3.15) et (3.16)) dans la relation (3.4), ceci nous permet
d'expliciter l'impédance electrique avec pertes10 :
1
??=
1 - ????2 1 - ????????????
??????0(1 - ????????????)
1 + ?? ??????????
2
?????? (?????? ?? 1 - ?? ?????????? ))
(3.17)
2 2
??
2
3.2.2.2.2 Simulation de l'impédance
électrique avec pertes
La figure 3.9 montre pour une ceramique piezoelectrique de
type PZT503, l'évolution de la résistance et réactance de
l'impédance electrique d'une plaque de dimensions 20 × 20 ×
0.3 ????. Nous constatons que les pertes dielectrique et mecanique entrainent
la variation de la resistance. Il nous faut donc completer le modèle du
transducteur sans pertes en y ajoutant des elements electriques resistifs.
10 Le developpement limite de Taylor d'ordre "1" est utilise
afin d'effectuer des approximations sur les differents paramètres de
notre modèle et par consequent un modèle simple est obtenu.
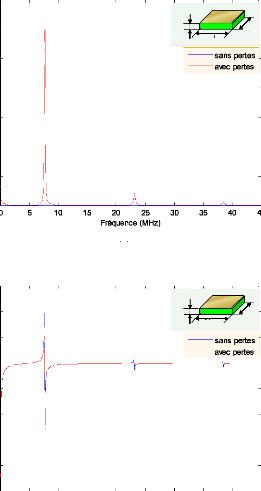
0.3
mm
20
PZT503
mm
mm
20
(a)
0.3
mm
20
PZT503
mm
mm
20
(b)pert
Fig. 3.9 - Courbe simulée de
l'impédance;(a) Résistance, (b) Réactance
3.2.2.3 Schéma électrique
équivalent simplifié du transducteur
3.2.2.3.1 Schéma électrique
équivalent simplifié
D'une manière générale, au voisinage
d'une de ses fréquences de résonance, le comportement du
transducteur de faible charge acoustique est décrit par le schéma
équivalent simplifié illustré sur la figure 3.10 [92].
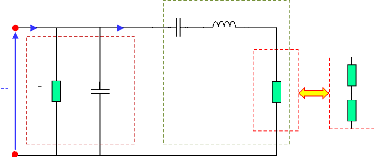
V3
I3
Im
Cm Lm
Branche statique
Branchgclynamique
ou motionnelle
R0
C0
Rm
Ra
Rb
Fig. 3.10 - Schéma électrique équivalent
simplifié du transducteur [93]
où
· R0 est une résistance représentant
les pertes diélectriques. Elles se relié à la tangente
l'angle de pertes diélectrique par [39]:
1
R0 = (3.18)
C0o.tanSe
· Ra est une résistance dans
laquelle se dissipe une énergie égale à l'énergie
mécanique rayonnée par la céramique.
· Rb est une résistance qui traduit les
pertes mécaniques dans le matériau.
· La résistance : Rm=
Ra+Rb.
· L'inductance « Lm » est
proportionnelle à la masse de la céramique.
· La capacité « Cm »
est proportionnelle à l'élasticité de la
céramique.
· Im est le courant motionnel.
La branche statique du schéma équivalent
traduisant les propriétés purement diélectriques,
formée par la mise en parallèle de R0 et C0. La
valeur très élevée de R0 permet dans la plupart
des cas de négliger cette branche.
La branche motionnelle du schéma équivalent
traduisant les propriétés mécaniques de
l'élément vibrant constituée par la mise en série
de Rm, Cm et Lm.
Les fréquences de résonance « ????,
????» associées respectivement au circuit oscillant série
(formé par la branche motionnelle) et au circuit oscillant
parallèle (formé par l'association de la branche
électrique et motionnelle) sont donnés par les relations [39]:
|
|
1
|
|
|
|
???? =
|
|
|
(3.19)
|
|
|
|
|
2?? ????
|
????
|
|
|
|
|
1
|
|
|
???? =
|
|
|
(3.20)
|
|
|
|
|
2?? ????
|
??0????
|
|
|
|
|
|
|
Le coefficient de couplage électromécanique est
donné par [18]:
|
|
|
???? =
|
~????
|
|
(3.21)
|
|
|
|
|
|
|
3.2.2.3.2 Identification des paramètres du
schéma électrique équivalent simplifié 3.2.2.3.2.1
Procédé d'identification
L'identification des paramètres du schéma
équivalent simplifié se fait à partir du tracé de
l'admittance électrique du transducteur « Y » dans le
diagramme de Bode (cf. figure 3.11.a) et dans le plan de Nyquist (cf. figure
3.11.b).
Le tracé de l'admittance dans le plan de Bode fait
apparaitre les phénomènes de résonance (admittance
maximale pour « ???? ») et d'antirésonance (admittance
minimale pour « ???? ») qui sont respectivement proches des
fréquences ???? et ????.
Les éléments du circuit équivalent sont
déterminés à partir du tracé de l'admittance dans
le plan de Nyquist avec les relations [47,94]:
· Résistance ??0 :
|
·
·
·
·
|
Résistance ???? :
Capacité ??0 : Capacité
???? : Inductance ???? :
|
??0
????
??0 ???? ????
|
1
|
??
; ????????
|
« ???? (3.22)
(3.23)
3.24)
(3.25)
(3.26)
|
|
= R?? (??(??))
1
=
|
|
R?? ?? ????~ -
I?? ?? ????)
|
|
|
1
??0
|
|
=
????
2
??0 ????2 - ????
2 ~
|
|
=
????
1
=
|
|
??0 (????2 - fs2)
|

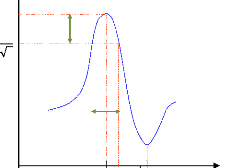
YM
Ym
Ym
2
3dB
Af
Résonance
Antirésonance
f
(a)
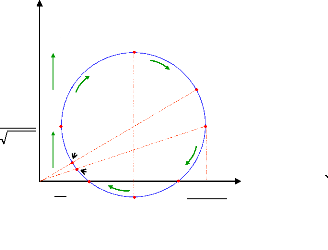
C0
Lm Cm
??0
f 2
??0 + Rm
f 1
f
f M
fs
f p Conductance Re (Y)
1
f
1
f m
f a f r
(b)
Susceptance 3m(Y)
3.2.2.3.2.2 Simulation de l'admittance
électrique
La figure 3.12 montre le tracé de l'admittance
électrique d'un disque céramique de type PZT503 dans le plan de
Nyquist.
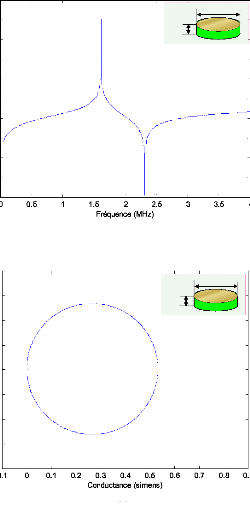
1mm
16mm
PZT503
(a)
(c)
1mm
16mm
PZT503
Fig. 3.12 - Tracé simulé de l'admittance
électrique: (a) Dans le diagramme de Bode, (b)
Dans le plan de
Nyquist
3 35 4
3.2.2.3.2.3 Identification des
paramètres
A partir des résultats de simulation
précédents, les différents paramètres du
schéma électrique équivalent simplifié sont
déduits et résumés dans le tableau 3.3.
|
Paramètres
|
valeur
|
Unité
|
|
fr
|
1.61
|
MHz
|
|
fa
|
2.31
|
|
R0
|
1.98
|
kÙ
|
|
C0
|
989
|
pF
|
|
Rm
|
1.21
|
Ù
|
|
Lm
|
9330
|
mH
|
|
Cm
|
1050
|
pF
|
Tab. 3.3 - Paramètres du schéma électrique
équivalent simplifié
3.3 Simulation d'un transducteur ultrasonore
piézoélec-
trique
Dans cette partie, parmi les schémas équivalents
que nous avons décrits (cf. § 3.2.1.3), le modèle de Leach
à été choisi pour réaliser nos simulations, car il
utilise des sources contrôlées au lieu du transformateur.
L'utilisation des sources contrôlées entraîne la disparition
de la capacité négative comme dans le modèle de Mason et
du transformateur dont le rapport de transformation varie en fonction de la
fréquence comme dans le modèle KLM.
3.3.1 Caractérisation de la ligne de transmission et
analogie électroacoustique
Une onde ultrasonore se propageant dans un milieu peut
être décrite comme une perturbation à laquelle le milieu
réagit. De même, dans une ligne de transmission électrique
une impulsion électrique peut se propager à travers elle. Cette
impulsion est reçue à l'autre extrémité de la ligne
après un temps très court, mais fini et une certaine vitesse. Par
analogie à l'onde ultrasonore, l'impulsion électrique est la
concentration et raréfaction des électrons à
l'intérieur d'une ligne de transmission électrique [98].
Une ligne de transmission acoustique est
caractérisée de façon similaire à une ligne de
transmission électrique. Une analogie électro-acoustique (cf.
annexe C) établit une correspondance entre une ligne de transmission
électrique et une transmission d'onde acoustique. Cette correspondance
permet ainsi de modéliser simplement le comportement d'une ligne de
transmission [5].
La ligne de transmission avec pertes est
modélisée par un quadripôle, avec une tension et un courant
d'entrée et de sortie [79]. Ce quadripôle est lui-même
constitué de plusieurs dipôles passifs appelés
paramètres primaires de ligne comme le montre la figure 3.13.
I(x,t) R.dx L.dx I(x+dx,t)
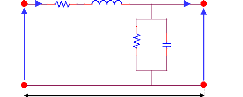
V(x,t) G.dx C.dx V(x+dx,t)
dx
Fig. 3.13 - Schéma électrique équivalent
d'une ligne de transmission de longueur ????
avec
· R est la résistance linéique.
· L est l'inductance linéique.
· C est la capacité linéique.
· G est la conductance linéique.
· ??(??, ??)et ?? ??, ??) sont respectivement le courant et
tension d'entré de la ligne.
· ??(?? + ????, ??)et ?? ?? + ????, ??) sont respectivement
le courant et tension de sortie de la
ligne.
Les paramètres secondaires (Ze,ã),
sont exprimés en fonction des paramètres primaires de la ligne
(R,L,C,G). Ainsi, l'impédance caractéristique
électrique et la constante de propagation sont respectivement
données par [99]:
7 R+jùL
(3.27)
Ze iG+jùC
et
ã = R+jùL~(G+jùC) =??????
+j?????? (3.28)
Pour un milieu acoustique avec pertes, l'impédance
caractéristique acoustique est exprimée par la relation [96]:
Za=ñva 1+jùô
(3.29)
avec ô est le temps de relaxation.
En faisant un développement limité sur les
équations (3.27) et (3.28), on obtient :
Ze?JL C 1+ 1
2jù R L - G C (3.30)
et
1
ã? 2 LC

+jù LC (3.31)
R G
L + C

1
2 LC
1
+ 2 LC
G
C (3.36)
?????? =
R
L

Dans le cas de pertes faibles, mais non négligeables
où R«ùL et G«ùC et
ùô«1, les impédances caractéristiques :
électrique (équation 3.30) et acoustique (équation 3.29)
sont
respectivement approximée par : Ze? L
?? et Za? ñva. Pour corréler
les deux impédances caractéristiques, on utilise l'analogie entre
les grandeurs électriques et acoustiques (cf. annexe C).
L'équivalence entre les deux systèmes est donnée par
[98]:
Ze= ZaA (3.32)
avec A est la section de la céramique
piézoélectrique perpendiculaire au sens de la propagation des
ondes acoustiques.
La vitesse de propagation dans le milieu acoustique
s'écrit [95]:
1
va = LC (3.33)
En utilisant les équations (3.32) et (3.33), on obtient
les relations suivantes:
L? Añ (3.34)
1
C= Añva (3.35)
La partie réelle de l'équation (3.31) est la
constante d'atténuation :
Dans la théorie classique de l'atténuation
acoustique, la constante d'atténuation s'écrit [79]:
aaclassique =????v +????t (3.37)
avec aav est le coefficient d'atténuation
dû aux pertes visqueuses, et aat est le coefficient
d'atténuation dû à la conduction thermique.
En utilisant les équations (3.34), (3.35), (3.36) et
(3.37), les relations suivantes peuvent être obtenues :
R= 2ñvaA????v (3.38)
2
G= ñAva aat (3.39)
3.3.2 Sous-circuit PSPICE du modèle de Leach
Les sources contrôlées du modèle de Leach
que nous avons décrit (cf. § 3.2.1.3.3), ont des gains qui varient
en fonction de la fréquence. Or, PSPICE n'accepte pas la
fréquence comme paramètre à ses modèles de sources
contrôlées [70]. Pour cela, la dépendance en
fréquence est modélisée utilisant les différentes
approches représentées dans la figure 3.14. Dans la partie
électrique du modèle, ceci est accompli par l'utilisation d'un
circuit équivalent de Norton qui consiste en une source de courant
contrôlée par courant « F1 » en
parallèle avec la capacité « C0 ». Ce circuit
équivalent accomplit la nécessité
d'intégration11
de « v1-v2 ». Dans la partie
mécanique du modèle une source de courant contrôlée
par courant « F2 » est utilisée avec une
capacité « C1 » pour accomplir l'intégration
du courant« /3 » [100].
Les deux parties : électrique et mécanique
interagissent par de deux sources de courant contrôlées par
courant« F1 » et «F2 ». Dans la partie
mécanique, la déformation elle-même n'est pas
mesurée, mais le courant «v1-v2 » qui
représente le taux de déformation est mesuré. Ce courant
contrôle la source contrôlée « F1 » de
gain « h33C0». Dans la partie électrique,
le courant « /3 » contrôle la source contrôlée
« F2 » de gain «h33». Les noeuds de sorties de la
source contrôlée doivent être intégrée pour
obtenir une charge totale sur les électrodes. Pour assurer l'isolation
de l'intégrateur, une source de tension contrôlée par
tension de gain « 1 » est utilisée. La résistance
« R1» sert à éviter le cas des noeuds
flottants12.
11
Une multiplication par s dans le domaine du transformer de
Laplace représente l'opérateur dérivé dans le
domaine temporel et une division par s dans le domaine du transformer de
Laplace représente l'opérateur intégrale dans le domaine
temporel [95].
12 Pour le logiciel PSPICE, les noeuds de sortie de la source
contrôlée ne doivent pas etre flottants. Ils doivent etre relies
à la masse (noeud 0) d'une manière ou d'une autre,
éventuellement par de fortes résistances.
Chapitre 3. Modélisation unidimensionnelle et
Simulation d'un transducteur ultrasonore piézoélectrique
63
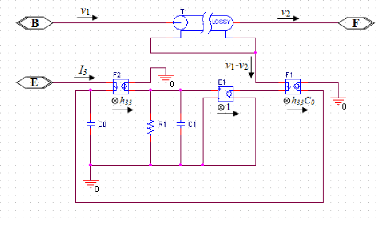
-
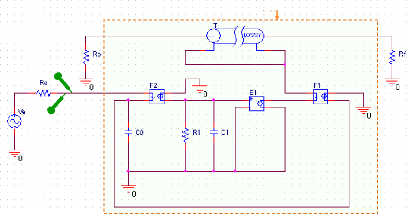
I
V
Transducteur
Fig. 3.14 - Sous-circuit PSPICE du modèle de Leach
[96]
3.3.3 Simulation de l'impédance électrique
du transducteur
3.3.3.1 Procédé de simulation
Pour simuler l'impédance électrique du
transducteur, en excitant le transducteur (résonateur libre) par une
tension sinusoïdale et déduisant le rapport ente la tension et
courant d'entrée du transducteur (i.e. ?? = ??/??) (cf. figure 3.15). Le
matériau absorbant (air) et le milieu de propagation (air) sont
modélisés comme étant des résistances.
3.3.3.2 Résultats de simulation
Les résultats de simulation sont
représentés sur la figure 3.16. La fréquence
d'antirésonance du transducteur a lieu pour 7.7MHz.
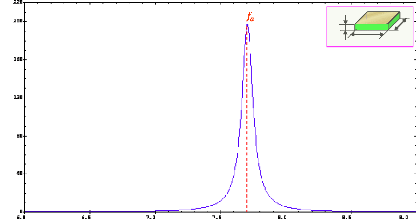
Re(Z) (Ohms)
7.7
0.3
mm
20
PZT503
mm
20
mm
Fréquence (MHz)
(a)
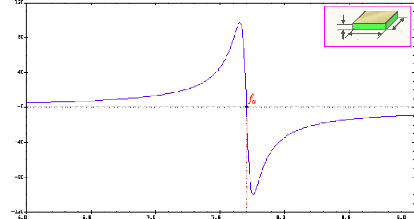
Im(Z) (Ohms)
7.7
0.3
mm
20
PZT503
mm
20
mm
Fréquence (MHz)
(b)
Fig. 3.16 - Variation de l'impédance en fonction de la
fréquence : (a) Partie réelle (ou
résistance) ;(b)
Partie imaginaire (ou réactance)
3.3.3.3 Validation des résultats de
simulation
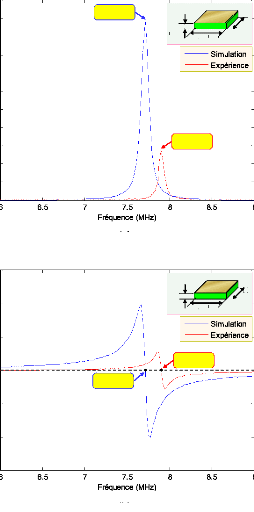
(a)
(c)
7.7 MHz
0.3
mm
7.9 MHz
20
PZT503
mm
20
mm
7.7 MHz
imulati
0.3
mm
7.9 MHz
20
PZT503
mm
20
mm
Afin de vérifier la validité des
résultats de simulation précédents, nous avons
exploité les résultats expérimentaux donnés dans la
référence [85] et effectué une comparaison entre les
courbes expérimentales de l'impédance et celles issues de la
simulation (cf. figure 3.17). On peut observer une bonne correspondance entre
les positions de fréquences d'antirésonances.
3.3.3.4 Paramètres utilisés pour la
simulation
Les différents paramètres utilisés pour la
simulation sont résumés dans les tableaux cidessous :
Céramique piézoélectrique
de type <
PZT503 "
Ligne de transmission
Gains des sources contrôlées
Paramètre
|
Valeur
|
Unité
|
|
a1
|
20×10-3
|
m
|
|
a2
|
20×10-3
|
m
|
|
a3
|
0.3×10-3
|
m
|
|
A
|
4×10-4
|
m2
|
|
ñ
|
7.8×103
|
kg.m-3
|
|
????
|
4622.5
|
m/s
|
|
fa
|
7.7
|
MHz
|
|
h33
|
5.91×109
|
V/m
|
|
S
å33
|
4.69×10-9
|
F.m-1
|
|
C0
|
6.26
|
nF
|
|
Qm
|
75
|
-
|
|
L
|
3.12
|
H
|
|
C
|
15
|
nF
|
|
R
|
2.01
|
MÙ
|
|
G
|
0
|
s
|
|
F1
|
37
|
V.F/m
|
|
F2
|
5.91×109
|
V/m
|
|
E1
|
1
|
-
|
|
R1
|
1
|
kÙ
|
|
C1
|
1
|
F
|
Tab. 3.4 - Paramètres du transducteur ultrasonore
piézoélectrique
|
Paramètre
|
Valeur
|
Unité
|
|
Milieu avant
< air "
|
Zf
|
0.00043
|
Mrayl
|
|
Rf
|
0.17
|
Ù
|
|
Milieu arrière
< air "
|
Zb
|
0.00043
|
Mrayl
|
|
Rb
|
0.17
|
Ù
|
Tab. 3.5 - Paramètres des milieux avant et
arrière
|
Paramètre
|
Valeur
|
Unité
|
|
Ve (tension
sinusoïdale)
|
Amplitude : VAMPL
|
7.5
|
V
|
|
Fréquence : FREQ
|
7.7
|
MHz
|
|
Offset : VOFF
|
0
|
V
|
|
AC
|
1
|
V
|
|
Re
|
50
|
Ù
|
Tab. 3.6 - Paramètres du circuit d'excitation
électrique
3.4 Conclusion
Pour pouvoir caractériser le transducteur ultrasonore
piézoélectrique, la détermination de ses fréquences
de résonances et d'antirésonances à partir du tracé
de son impédance électrique devient nécessaire. À
cet effet, dans ce chapitre, le tracé de l'impédance
électrique est obtenu par deux méthodes : par simulation du
modèle unidimensionnel et par utilisation d'un circuit PSPICE. Les
résultats de simulation sont ensuite validés. Une bonne
correspondance est constatée entre la simulation et
l'expérience.
Ainsi, dans ce chapitre, nous avons simulé le
modèle de l'impédance électrique avec pertes du
transducteur et identifié les paramètres de son schéma
électrique équivalent simplifie.
Chapitre 4
Modélisation tridimensionnelle d'un transdu-
cteur ultrasonore piézoélectrique
Sommaire
4.1 Introduction . 69
4.2 Hypothèses générales .. 70
4.3 Expression tridimensionnelle de l'impédance
électrique d'une céramique
piézoélectrique 72
4.3.1 Céramique piézoélectrique de forme
parallélépipédique . 72
4.3.2 Céramique piézoélectrique de forme
cylindrique .. 74
4.3.3 Discussion . 76
4.4 Simulation de l'impédance électrique d'une
céramique piézoélectrique 76
4.4.1 Résultats de simulation . 76
4.4.2 Validation du modèle tridimensionnel de
l'impédance électrique
d'un disque céramique .. 79
4.5 Conclusion 80
4.1 Introduction
Les modèles unidimensionnels sont très
utilisés pour déterminer le comportement des transducteurs
ultrasonores piézoélectriques utilisés en médecine
notamment en imagerie médicale et ont conduit au développement
considérable de l'échographie ultrasonore. L'amélioration
de la qualité des images obtenues par cette technique est liée en
particulier à celle des transducteurs utilisés [101]. Toutefois
le couplage des modes en épaisseur et latéraux (ou radiaux) fait
apparaître des images fantômes ou artefacts qui ne peuvent
être interprétées qu'en faisant appel à des
modèles bi-ou tridimensionnels. Les méthodes numériques
(méthode des éléments finis par exemple) permettant de
déterminer tous les modes de vibrations d'une céramique
piézoélectrique sont très efficaces et donnent de bons
résultats. En contrepartie, elles sont très lourdes et ne donnent
pas aisément une vision synthétique de l'influence des
différents paramètres. Seuls les modèles analytiques
permettront de pallier ces inconvénients.
La céramique piézoélectrique est
l'élément principal constituant le transducteur et sa
caractérisation tensorielle (i.e. la détermination des ses
paramètres : diélectriques, élastiques et
piézoélectriques) nécessite habituellement l'utilisation
de plusieurs échantillons dont la forme et les dimensions sont
définies dans les normes IEEE [102,103]. La réalisation de ces
échantillons est une opération longue et bien qu'ils proviennent
du méme lot, il peut, lors de la polarisation, se produire une petite
dispersion des résultats. Il serait plus judicieux de pouvoir
déterminer tous les paramètres à partir d'un méme
échantillon. Les modèles unidimensionnels décrits dans les
normes supposant que les modes de vibration sont découplés ne
permettent pas de réaliser la caractérisation complète au
moyen d'un seul échantillon, car pratiquement il existe des couplages
dus à la fois aux effets piézoélectriques et
élastiques par effet de Poisson. Dans ce cas, la modélisation
unidimensionnelle ne s'applique plus.
La modélisation tridimensionnelle que nous allons
présenter dans ce chapitre permet de surmonter les difficultés
précédentes. Elle fournit l'ensemble des modes de vibration de
type longitudinale relatifs à une céramique
piézoélectrique de forme donnée :
parallélépipédique ou cylindrique et conduit à des
expressions des impédances électriques applicables à
toutes les fréquences. Celles.ci se réduisent aux expressions
simplifiées unidimensionnelles lorsque sont introduites les conditions
de vibration unidimensionnelle. De plus, la modélisation
tridimensionnelle proposée reposant sur des hypothèses
indépendantes du mode et de la géométrie
considérés, fait intervenir pour une géométrie
donnée, l'ensemble des paramètres liés aux ondes de type
longitudinal. Il est par exemple possible à partir d'un disque
céramique d'obtenir les quatre constantes élastiques à
induction constante (c11 ?? , c12 ?? , c13 ?? et c33 ?? ).
4.2 Hypothèses générales
Contrairement aux modèles unidimensionnels pour
lesquels les hypothèses simplificatrices varient avec le mode et la
géométrie considérés (cf. annexe D), les
modèles tridimensionnels utilisent les mêmes hypothèses
pour les géométries : parallélépipédique
(plaque ou barreau) et cylindrique (disque ou cylindre) (cf. tableau 4.1).
Elles se rapportent l'une au type d'onde se propageant dans les
matériaux piézoélectriques et l'autre aux conditions aux
limites sur les faces latérales des échantillons [102,104] :
· La céramique piézoélectrique est
sans pertes.
· La vibration globale de la céramique
piézoélectrique s'effectue sous l'action de trois ondes planes
couplées se propageant chacune selon un axe de coordonnées. Les
couplages s'effectuent par l'intermédiaire des coefficients de Poisson
et les paramètres piézoélectriques de la céramique.
Cette hypothèse entraîne l'absence de vibrations de cisaillement
et on peut alors prendre en compte l'ensemble des paramètres relatifs
aux modes longitudinaux. Tout se passe finalement comme si trois modes pistons
étaient couplés par les constantes élastiques et
piézoélectriques de la céramique. Par suite, tous les
points d'une face vibrent en phase et les déplacements correspondants
sont indépendants des deux autres coordonnées, soit :
u1 = U1 (x1) exp (jcut)
u2 = U2 (x2) exp (jcut) (4.1)
u3 = U3 (x3) exp (j cut)
· Du fait de la propagation d'ondes planes selon les
axes de coordonnées, les termes d'indices croisés (13,31 ou 23,32
ou 12,21) du tenseur des déformations sont nuls : S4 = S5 = S6 = 0. Il
s'ensuit que les composantes du tenseur des contraintes correspondant au
cisaillement sont aussi nulles : T4 = T5 = T6 = 0.
· Les faces latérales sont libres quelle que soit la
géométrie des échantillons, ce qui n'est pas toujours le
cas pour les modèles-unidimensionnels :
Tij nj = 0 (4.2)
· Les déplacements s'effectuant toujours
parallèlement à eux-memes, il n'y a pas de distorsion des lignes
de champ électrique. Les composants E1 et E2 du champ électrique
sont donc consentement nulles soit : E1 = E2 = 0 Vxi .
· Du fait de l'écriture de u1 et u2 on a 8ui/8xj
= 0 quand i * j et puisque E1et E2 sont nuls on aura aussi D1 = D2 = 0 dans le
matériau. Par suite la relation de Gauss ( divD = 0) se réduira
à 8D3/8x3 = 8[D0 exp (jcut)]/8x3 = 0 sera constante et
égale à D0 .
· La mise en oscillation de la
céramique piézoélectrique est réalisée par
l'application d'une différence de potentiel sur les électrodes
déposées sur les faces supérieures et inférieures
perpendiculaires à l'axe de polarisation x3 ou z :
??3 = ??0exp ??????) (4.3)
Les conditions de fonctionnement portant sur les
déplacements et sur l'induction nous les choisirons comme variables
indépendantes. Sous forme matricielle les équations de la
piézoélectricité (cf. tableau 1.1) seront [101]:
??1
??2
??3
??4
??3
|
= ??11????1 + ??12????2 +
??13????3 - h31??3 = ??12????1
+ ??11?? ??2 + ??13????3 - h31??3
= ??13????1 + ??13????2 +
??33????3 - h33??3 = ??5 = ??6 = 0; ??4
= ??5 = ??6 = 0
= -h31 ??1 + ??2) - h33??3 + ??33????3
??1 = ??2 = 0; ??1 = ??2 = 0
|
(4.4)
(4.5)
|
|
Geometrie
|
|
|
|
|
Hypothèses
|
|
|
|
|
Résultats
|
|
|
|
|
Mécaniques
|
|
Electriques
|
|
|
|
V i tesse
|
|
Permittivite
|
|
|
N.0,00,1 . 1,401 WI
1,1.
de coup! age
|
|
Plaque rectangul ai re
a1,a2,a3
qUQIconques
|
??1, ??1, ??4 ??4
|
??2, ??3 ??2, ??3 = ??5 = ??5
|
? 0 ? 0 = ??6 = ??6
|
=
=
|
0
0
|
??1 =
??1 =
? ??1,
|
??2 = 0
??2 = 0
??2 ??3 ? 0, ??3
|
?
|
0
|
2
????3
???? 2
|
=
=
|
??33 ??
|
??33 ??
|
????2
2
|
????
=
=
|
2
~33
2
~31
|
??
??33
|
|
|
|
|
Di sque ou cyl i ndre
a,a3
quel conques
|
????,
????,
??4
??4
|
????, ????
????, ????
= ??5
= ??5
|
? 0 ? 0 = ??6 = ??6
|
=
=
|
0
0
|
???? =
???? =
? ??, ??
|
???? = 0
???? = 0
??3 ? 0, ??3
|
?
|
0
|
2
???? 2
|
????3
=
=
|
??
??33
|
??33 ??
|
????2
2
????
|
=
=
|
2
~33
2
~31
|
??
??33
|
|
|
|
|
|
Tab. 4.1 - Caractérisation tridimensionnelle:
hypothèses et principaux résultats [102]
4.3 Expression tridimensionnelle de l'impédance
électri-
que d'une céramique
piézoélectrique
4.3.1 Céramique piézoélectrique de
forme parallélépipédique
Considérons la céramique
piézoélectrique de la figure 4.1.
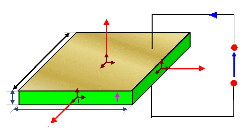
x3
a1
T4
T5
T6
T3
T4
T2
x2
V3
a3
T5 T6T
P +
-
1
a2
I3
x1
Fig. 4.1 - Dimensions et système de coordonnées
d'une plaque céramique
D'après [101], l'expression (4.1) peut s'écrire
:
u1 = U1sin(ax1) exp (jcut)
u2 = U2sin(ax2) exp (jcut) (4.6)
u3 = U3sin(a3x3) exp (jcut)
avec a = cu/vp est le nombre d'onde dans la céramique
selon une direction quelconque dans le plan « x1-x2 ».
Les différentes conditions aux limites
mécaniques sur les faces permettent de calculer les valeurs des
amplitudes : U1, U2 et U3 des ondes en fonction des coefficients
élastiques et piézoélectriques.
Sous la forme développée la relation (4.2)
s'écrit:
· T1 = 0 , pour x1 = #177;a1/2 et x2 et x3 arbitraires,
mais x2 E [--a2/2, a2/2 et x3 E [--a3/2, a3/2 ].
· T2 = 0 , pour x2 = #177;a2/2 et x1 et x3 arbitraires,
mais x1 E [--a1/2, a1/2 et x3 E [--a3/2, a3/2].
· T3 = 0 , pour x3 = #177;a3/2 et x1 et x2 arbitraires,
mais x1 E [--a1/2, a1/2 et x2 E [--a2/2, a2/2].
En reportant les relations (4.6) dans les expressions (4.4),
les polarisations des diverses ondes sont :
??1 =
??2 =
??3 =
avec
??1 =
??3 =
??1??0
??cos ????1/2)
(4.7)
(4.8)
??1??0
??cos ????2/2)
??3??0
??3cos ??3??3/2)
??
~31??33 ?? - ~33??13
?? 2
??11 ?? + ??12 ?? ~??33 ?? - 2??13
??
~33 ??11 ?? + ??12 ?? ~ - 231??13
?? 2
??11 ?? + ??12 ?? ~??33 ?? - 2??13
En reportant les relations (4.6) dans la relation (4.5) et en
prenant la ligne de champ correspondant à ??1 = ??2 = 0, on obtient :
1
+
????1
2 ~
?? ??3 ~??3 - ~33 + ??33 ?? ??3 (4.9)
????2 ????3
2 ~
cos
??3 = -~31??1
cos
1
En intégrant le champ électrique on obtiendra le
potentiel « ??3 » appliqué d'où :
[??3 = ??33?? - h31??1
|
1 1 ~ ??3 - 233??3 tan ??3??3
+
cos ????1 cos ????2 2 ~
??3
2 ~ 2 ~
|
??3 (4.10)
|
|
La charge totale sur les électrodes s'écrit
[101]:
?? = ??1??2??3 (4.11)
Le courant électrique est lié à la charge
totale sur les électrodes par la relation :
?? ??
??3 = = ????1??2????3 (4.12)
????
Par suite, l'expression de l'impédance
électrique «??» de la céramique
piézoélectrique sera :
1 - 2 ~31??13 ??
?? (4.13)
~31 ~33(??11 ?? + ??12 ?? )

??3 ?? =
1 1 - ~31??33 ?? - ~33??13
=
??3 ????0?? ?? 2
??11 ?? + ??12 ?? ~??33 ?? - 2??13
??
?? ~ ?? + ???? 2

??33 ??13 ?? 2
1 - 2 ??
??11 ?? + ??12 ?? ~??33
avec
1 1
L=
cos
cos
aa2)
2
aa1) + 2
tan
E=
a3
a3a3\
2 )
??3a3
2
S a1 a2
C0 = 633
(4.14)
L'expression de l'impédance électrique
(relation 4.13) montre que le couplage des modes se manifeste par la
présence de deux termes : l'un est relatif aux modes latéraux
(L) et l'autre au mode en épaisseur
(E).
Les fréquences d'antirésonance des modes
latéraux et en épaisseur sont respectivement données par
les relations :
VP
fLi = (2n + 1) 2a ; i = 1 ou 2, n E N (4.15)
i
fE = (2n + 1)
|
VP3
; n E N (4.16)
2a3
|
|
4.3.2 Céramique piézoélectrique de
forme cylindrique
Considérons la céramique
piézoélectrique de la figure 4.2.
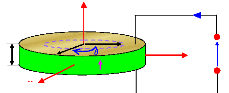
X3 z
I3
a3
X2
V3
a
r
P + -
X1
Fig. 4.2 -- Dimensions et système de
coordonnées d'un disque céramique
Les hypothèses précédentes sont les
mêmes. Seules changent les écritures des déplacements afin
de tenir compte de la géométrie particulière de la
céramique piézoélectrique. Dans le cas de vibrations
radiales, on a [104]:
où (r, e, z) sont les cordonnées cylindriques.
La loi de newton est donnée par la relation [101] :
??T??j
= ??
??xj
|
a2ui
at2 (4.18)
|
|
En introduisant les équations (4.17) dans
l'équation (4.18), on obtient :
ur = Ur?? 1(????)exp (j cut)
uz = Uz sin(a3a3) exp (j cut)
(4.19)
ue = 0
En reportant les expressions des déplacements selon r et
z dans les relations (4.4) et (4.5), l'expression de l'impédance
électrique « Z » de la céramique
piézoélectrique sera :
Z=
|
1 j??0cu[1
|
?? h31
|
h31 C133 h33 C1D3
R
2
ac/C33 43 aa0(aa)
|
h33
|
fl33 ??
ah33 h31C13D???? 0(????) El (4.20)
????C33D 43 2????0(????)
|
|
|
|
avec
R = (70(aa)
tan
a3 a3
2 J
E=
a3 a3
(4.21)
2
c0 = Eg3n- a3
a2
3a = aC if1a0 (aa) CD a CD
12
- (aa)
et a0(aa) et a1(aa) sont respectivement les fonctions de Bessel
de première espèce d'ordres 0 et1 de la variable « aa
».
L'expression de l'impédance électrique (relation
4.20) comporte deux termes : l'un est relatif aux modes radiaux
(R) et l'autre au mode en épaisseur
(E).
Les fréquences d'antirésonance pour le mode en
épaisseur ont la meme expression que pour la céramique
piézoélectrique en forme de plaque (cf. équation
(4.16)).
4.3.3 Discussion
Du fait des hypothèses générales
utilisées, les résultats de la modélisation
tridimensionnelle (cf. tableau 4.1) sont valables quelques soient les
dimensions de l'échantillon céramique :
· Pour la géométrie
parallélépipédique, les résultats sont applicables
aux cas d'une plaque ou barreau.
· Pour la géométrie cylindrique, les
résultats sont applicables aux cas d'un disque ou cylindre.
De plus, ces résultats mettent clairement en
évidence l'influence des couplages piézoélectrique (
h31 ) et élastique ( c12 ?? , c13 ?? ) sur le comportement de
la céramique piézoélectrique et montrent que les vitesses
acoustiques et permittivités ne dépendent pas de la
géométrie de l'échantillon.
Contrairement aux modèles unidimensionnels qui
étaient applicables seulement autour d'une fréquence de
résonance particulière, les modèles tridimensionnels sont
valables à toutes les fréquences.
Remarquons que les expressions (4.13) et (4.20) se simplifient
lorsque l'on considère que certains coefficients élastiques et
piézoélectriques sont nuls. On retrouve alors les expressions
unidimensionnelles correspondantes. Ce qui montre, a contrario, que pour
établir les relations simplifiées, il faut supposer nuls les
coefficients correspondants.
· Si on suppose c12 ??= c13 ??= 0 et h31 = 0, les
expressions (4.13) et (4.20) se réduisent et on retrouve les expressions
(3.4) et (D.2).
· Si on suppose c33 ?? = 0 et h33 = 0, l'expression (4.20)
se réduit et on retrouve l'expression (D.1).
4.4 Simulation de l'impédance électrique
d'une cérami-
que piézoélectrique
Les modèles unidimensionnels permettent de situer les
fréquences relatives à un mode particulier alors que les
modèles tridimensionnels fournissent l'ensemble du spectre de
fréquences correspondant à une géométrie
donnée (plaque, barreau, disque ou cylindre). Afin de vérifier
cette propriété, nous avons effectué une simulation des
expressions tridimensionnelles des impédances électriques pour
une céramique piézoélectrique de type PZT802.
4.4.1 Résultats de simulation
4.4.1.1 Céramique de forme
parallélépipédique
Les figures 4.3 et 4.4 montrent les évolutions
tridimensionnelles des impédances électriques relatives à
respectivement une plaque et un barreau. Nous constatons que, par rapport au
modèle unidimensionnel qui ne fait apparaitre que les fréquences
relatives au mode en épaisseur, le modèle tridimensionnel fait
apparaitre en plus de ces fréquences, les fréquences relatives
aux modes latéraux.
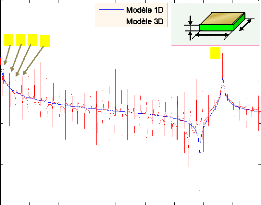
L1 L2 L3
L4
0.3
mm
20
E1
PZT802
mm
20
mm
Fig. 4.3 - Courbe simulée de l'impédance
électrique d'une plaque céramique
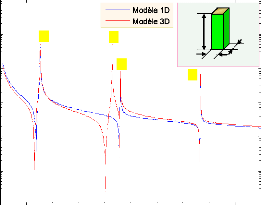
E1
L1
E2
15mm
5mm
L2
PZT802
5mm
Fig. 4.4 - Courbe simulée de l'impédance
électrique d'un barreau céramique
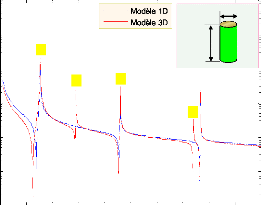
E1
R1
E2
15mm
R2
5mm
PZT802
4.4.1.2 Céramique de forme cylindrique
Les figures 4.5 et 4.6 montrent les évolutions
tridimensionnelles des impédances électriques relatives à
respectivement un disque et un cylindre. Nous constatons que, par rapport au
modèle unidimensionnel qui ne fait apparaitre que les fréquences
relatives au mode en épaisseur, le modèle tridimensionnel fait
apparaitre en plus de ces fréquences, les fréquences relatives
aux modes radiaux.
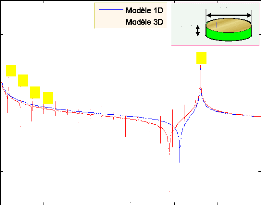
R1
R2
R3 R4
1mm
E1
16mm
PZT802
Fig. 4.5 - Courbe simulée de l'impédance
électrique d'un disque céramique
4.4.2 Validation du modèle tridimensionnel de
l'impédance élec- trique d'un disque céramique
Afin de valider notre étude, nous avons
exploité les courbes expérimentales de l'impédance
électrique d'un disque céramique de type « PZT802 »
données dans les références [105,106].
La figure 4.7 montre les évolutions théorique
et expérimentale de l'impédance électrique. La comparaison
entre les deux courbes montre que notre modèle permet de retrouver avec
un bon accord les positions relatives de fréquences
d'antirésonances radiales et en épaisseur. Par contre, le
modèle étant sans pertes, les amplitudes exactes des pics sont
erronées. Remarquons ainsi que la courbe expérimentale de
l'impédance présente d'autres modes de résonances qui
peuvent provenir de vibrations de cisaillement. Ces modes ont été
négligés dans notre modélisation et n'apparaissent pas
dans notre modèle.
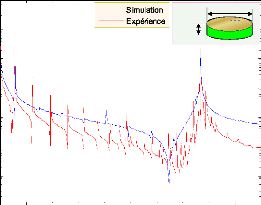
3mm
25mm
PZT802
Fig. 4.7 - Courbes simulée et expérimentale de
l'impédance électrique d'un
Expérence
disque céramique
Les valeurs de fréquences d'antirésonances
expérimentales et théoriques sont comparées et
reportées dans le tableau 4.2. Nous remarquons que les valeurs des
fréquences d'antirésonance théoriques et
expérimentales sont cohérentes.
Fréquences (kHz)
|
Théorie
|
Expérimentale
|
Erreur relative (%)
|
fR1
|
58.6
|
52.3
|
12
|
fR2
|
151.8
|
122.8
|
23
|
fR3
|
237.4
|
193.3
|
22
|
fR4
|
325.1
|
242.1
|
34
|
fE1
|
767.6
|
770.2
|
0.3
|
|
Tab. 4.2 - Comparaison des valeurs de fréquences
d'antirésonance théoriques et
expérimentales
4.5 Conclusion
Dans ce chapitre, après une description des
hypothèses générales de la modélisation
tridimensionnelle, les expressions des impédances électriques
pour les échantillons céramiques de forme :
parallélépipédique (plaque et barreau) et cylindrique
(disque et cylindre) sont données. Ensuite, ces expressions ont fait
l'objet de simulations, afin de montrer l'apport de la modélisation
tridimensionnelle par rapport à la modélisation
unidimensionnelle. Enfin, pour valider notre étude, une comparaison du
modèle de l'impédance électrique d'un disque
céramique de type PZT802 aux résultats expérimentaux est
effectuée.
Le travail de recherche présenté dans ce
mémoire traite la modélisation et simulation d'un transducteur
ultrasonore piézoélectrique.
Le premier chapitre a porté tout d'abord sur des
rappels concernant la piézoélectricité qui ont permis une
meilleure compréhension de ce phénomène et de ces
grandeurs physiques. Ensuite, un tour d'horizon des différentes familles
de matériaux piézoélectriques disponibles à ce jour
est présenté, suivi d'une description de modes de
déformation d'un matériau piézoélectrique. Enfin,
quelques applications des matériaux piézoélectriques sont
présentées : Transformateurs piézoélectriques,
chaussures piézoélectriques, actionneurs bilames et imprimante
à jet d'encre.
Dans le deuxième chapitre, les
propriétés des ultrasons et leurs interactions avec la
matière sont décrites. Puis les différents types de
transducteurs ultrasonores sont présentés : transducteur
piézoélectrique, transducteur capacitif, transducteur
piézorésistif et transducteur impulsion-écho.
Le troisième chapitre est consacré à la
modélisation unidimensionnelle et simulation avec PSPICE d'un
transducteur ultrasonore piézoélectrique. Dans la première
partie de ce chapitre, le modèle unidimensionnel de l'impédance
électrique sans pertes du transducteur est simulé. Ensuite, trois
schémas électriques équivalents du transducteur ont
été décrits. Enfin, après la simulation de
l'impédance électrique avec pertes, les paramètres du
schéma électrique équivalent simplifié du
transducteur sont identifiés à partir du tracé de son
admittance électrique dans le diagramme de Bode et dans le plan de
Nyquist. Dans la deuxième partie, l'impédance électrique
du transducteur est simulée avec PSPICE.
Les modèles unidimensionnels décrits dans le
chapitre précédent supposent que les modes de vibration (modes
latéraux ou radiaux et mode en épaisseur) d'une céramique
piézoélectrique sont découplés. Or, en effet, il
existe des couplages dus aux effets élastiques et
piézoélectriques. Le quatrième et dernier chapitre
présente une modélisation analytique tridimensionnelle pour les
échantillons céramiques de forme :
parallélépipédiques (plaque et barreau) et cylindriques
(disque et cylindre), prenant en considération les couplages entre les
modes de vibration. De plus, elle fournit l'ensemble du spectre de
fréquences
correspondant à une céramique
piézoélectrique et conduit à des expressions
tridimensionnelles qui se réduisent à celles déduites de
la modélisation unidimensionnelle lorsque certains coefficients
élastiques et piézoélectriques sont supposés
nuls.
Concernant la validation de nos résultats de
simulations, les résultats expérimentaux (courbes de
l'impédance électrique) donnés dans les
références [85,105,106] sont utilisés. Une bonne
correspondance est observée entre la simulation et
l'expérience.
Finalement, les perspectives à envisager au terme de
cette étude sont nombreuses et alléchantes :
· Conception de transducteurs ultrasonores
piézoélectriques pour l'application en imagerie médicale
et le contrôle non destructif.
· Modélisation bidimensionnelle de transducteurs
ultrasonores piézoélectriques avec PSPICE.
· Modélisation tridimensionnelle de transducteurs
ultrasonores piézoélectriques en utilisant l'expression
l'impédance électrique universelle. Cette dernière est
valable pour toutes les géométries : plaque, barreau, disque et
cylindre. Ainsi, elle permet d'obtenir les fréquences de
résonances et d'antirésonances relatives aux modes de vibration :
latéraux ou radiaux et en épaisseur d'un matériau
piézoélectrique de façon précise. De plus, à
partir de l'expression tridimensionnelle de l'impédance, les expressions
unidimensionnelle et bidimensionnelle peuvent être déduites.
D'après la référence [108], le modèle de
l'impédance électrique universelle nous donne des
résultats au moins 50 % meilleurs que ceux donnés par les autres
modèles décrits dans la littérature.
· Modélisation numérique tridimensionnelle
de transducteurs ultrasonores piézo- électriques en utilisant la
méthode des éléments finis «FEM» et
méthode des éléments frontières «BEM».
Bibliographie
[1] A. Kaddour,
«Etude, modélisation et visualisation des
champs acoustique rayonnés par des transducteurs
électroacoustiques circulaires et sphériques»,
Thèse de doctor- at, Université des
Sciences et de la Technologie d'Oran - Mohamed
Boudiaf, Juin 2004.
[2] H. -s. Lee,
«Etude et réalisation de sources acoustiques de puissance
en composite piézoélectrique 1.3 pour applications
thérapeutiques », Thèse de doctorat,
Institut National des Sciences Appliquées de Lyon,
France, Février 2003.
[3] J. Kocbach,
«Finite element modeling of ultrasonic piezoelectric transducers:
influ- ence of geometry and material parameters on vibration, response
functions and radi- ated field», dr.
scient thesis, University of Bergen,
September 2000.
[4] H. Jensen,
«Calculations for piezoelectric ultrasonic
transducers», Lic-Techn thesis,
Technical University of Denmark, Roskilde,
Denmark, May 1986.
[5] P. Maréchal,
«Transducteurs mono-éléments pour l'imagerie
ultrasonore haute rés- olution :
modélisation, réalisation et
caractérisation», Thèse de
doctorat, Université de Tours,
France, Décembre 2004.
[6] L. Rufer, «
Transducteurs électroacoustiques et ultrasonores:
des macro- aux micro-
systèmes », Habilitation à Diriger des
Recherches, Université Joseph Fourier de
Grenoble, France, Novembre
2007.
[7] I. R. Sinclair,
«Sensors and transducers», Newnes,
Great Britain, 2001.
[8] K. Jezzine, «Approche modale pour
la simulation globale de contrôles non-destruct- ifs par ondes
élastiques guidées», Thèse de
doctorat, Université Bordeaux 1,
France , Novembre 2006.
[9] J. De Rosnay, «Les
matériaux intelligents», 278e
conférence de l'Université de Tous Les Savoirs,
Octobre 2000.
[10] J. S.
Harrison, Z. Ounaies, «
Piezoelectric polymers»,
Phosphorus-containing pol- ymers and
oligomers, Vol. 3,
Encyclopedia of Polymer Science and Technology, John Wiley
& Sons, New York, USA,
pp. 474-498.
[11] F. Giraud,
«Modélisation causale et commande d'un actionneur
piézoélectrique à onde progressive»,
Thèse de doctorat, Université Lille
I, France, Juillet 2002.
[12] S. Le Dren,
«Elaboration de couches épaisses
piézoélectriques déposées sur substra- ts pour des
applications microtechniques», Thèse de
doctorat, Institut National des Sciences Appliquées de
Lyon, France, Septembre
2000.
[13] A. R. Streett,
«Preliminary finite element modeling of a piezoelectric actuated
mari- ne propulsion fin», Master of
science thesis, Rochester Institute of Technology,
New York, USA, September
2006.
[14] PIEZOCRYST advanced sensors GMBH,
www.piezocryst.com,
«Introduction to pi- ezoelectric sensors»,
Austria, August 2005.
[15] R. Periasamy, «
Shape control of composite structures with optimally placed
piézo- electric patches», Master
of science thesis, University of Waterloo,
Ontario, Canada, 2008.
[16] Measurement Specialties,
www.msiusa.com,
«Piezo film sensor-technical
manual», April 1999.
[17] L. Delmas, «Etude
et réalisation de capteurs à sortie fréquentielle en
orthophosphate de gallium (GaPO4)», Thèse de
doctorat, Université de
Franche-Comté, France, Sep- tembre
2005.
[18] H. Frayssignes, «Etude des effets
non-linéaires et des pertes dans les moteurs ultras- onores :
Introduction au problème de couplage mécanique entre les
voies», Thèse de doctorat,
Institut National des Sciences Appliquées de
Lyon, France, Novembre
2001.
[19] M. Wilm, «Etude et
réalisation de transducteurs composites pour l'imagerie acoust- ique et
le contrôle non-destructif»,
Thèse de doctorat, Université de
Franche-Comté,
France, Novembre 2004.
[20] A. V. Carazo,
«Novel piezoelectric transducers for high voltage
measurements», do- ctoral thesis,
Universitat politècnica de catalunya,
Barcelona, Spain, January
2000.
[21] James R. Phillips,
«Piezoelectric technology primer»,
Albuquerque, New Mexico.
[22] C. Millon,
«Contribution à l'étude de procédés
de réalisation de structures métal/ PZT/métal sur silicium
pour microsystèmes
piézoélectriques», Thèse de
doctorat, Institut National des Sciences Appliquées de
Lyon, France, Juillet
2003.
[23] N. S.
Almind, S. H.
Brodersen, «MEMS PZT based accelerometer:
design, fabric- ation and
characterization», Bachelor thesis,
Technical University of Denmark, Den- mark,
October 2007.
[24] E. Gaboriaud,
«Etude des résonateurs piézoélectriques dans
le domaine des micoon- des : application au
filtrage», Thèse de doctorat,
Université de Limoges, France, Oc-
tobre 2004.
[25] M. Hubain, «Capteurs
de pression et de force»,
http://perso/orange.fr/michel.hubain
/capteurs/phys/chap-p3.htm.
(Consulté le
12.04.2007).
[26] G. Fleury, C.
Gondard, «Improvements of ultrasonic inspections
through the use of piezocomposite transducers»,
6th European Conference on Non Destructive
Testings, France, May
1995.
[27] Wenkang Qi, Wenwu Cao,
«Finite element analysis and experimental studies of the
thickness resonance of piezocomposite transducers»,
Ultrasonic imaging, Vol. 18,
1996.
[28] N. J. Renault,
C. Martelett, P.
Clechet, «Capteurs chimiques et
biochimiques», Te- chniques de
l'Ingénieur, Doc. R 420 ;
P 360, France.
[29] C. A. Paget,
«Active health monitoring of aerospace composite structures by
embe- dded piezoceramic transducers», Doctoral
thesis, Royal Institute of Technology, St-
ockholm, Sweden, November
2001.
[30] J. M. Haussonne,
«Céramiques pour l'électronique et
l'électrotechnique», Presses Polytechniques et
Universitaires Romandes, Lausanne,
Suisse, 2002.
[31] A. Aydi, «Elaboration et
caractérisations diélectriques de céramiques
ferroélectriqu- es et/ou relaxeur de formule
MSnO3-NaNbO3 (M = Ba, Ca) », Thèse de doctorat,
Faculté des Sciences de Sfax, Tunisie,
Mars 2005.
[32] A. Faiz,
«Amortissement vibratoire et anéchoïsme par
traitement non-linéaire d'élé- ments
piézoélectriques», Thèse de
doctorat, Institut National des Sciences appliqués- de
Lyon, France, Mai 2006.
[33] C. Tilhac, «Développement
d'architectures de filtres à base de résonateurs à ondes
acoustiques de volume et contribution à l'intégration dans une
technologie avancée silicium industrielle pour des applications
radiofréquences», Thèse de
doctorat, Uni- versité de
Franche-Comté,
France, Juillet 2007.
[34] J. Fraden, « Handbook of modern
sensors : physics, designs,
and applications»,
Springer-Verlag, New York,
USA, 2004.
[35] P. Paruch,
«Atomic force microscopy studies of ferroelectric domains in
epitaxial PbZr0.2Ti0.8O3 thin films and the static and dynamic behavior of
ferroelectric domain walls», Doctoral thesis,
Université de Genève,
Genève, Switzerland,
2003.
[36] B. Fu, «
Piezoelectric actuator design via multiobjective optimization methods
»,
Doctoral thesis, Universität
Paderborn, Germany, June
2005.
[37] J. F. Lopez,
«Modeling and optimization of ultrasonic linear
motors», Doctoral th- esis, Ecole
Polytechnique Fédérale de Lausanne,
Lausanne, Switzerland, November
2006.
[38] S. O. Reza Moheimani and Andrew J. Fleming,
« Piezoelectric transducers for vibration control and
damping», Springer-Verlag,
London, UK, 2006.
[39] Saint-Gobain Quartz,
www.quartz.saint-gobain.com,
«Céramique
piézoélectriques», France,
2004.
[40] T. L.
Jordan, Z. Ounaies, «Piezoelectric
ceramics characterization», ICASE, NASA
Langley Research Center, Hampton, Virginia,
USA, September 2001.
[41] M. Malhis, «Contrôle actif
modal flou des rotors flexibles par plan d'action piézo-
électrique », Thèse de
doctorat, Institut National des Sciences Appliquées de
Lyon, France, Décembre
2002.
[42] L. Garbuio, «
Etude du phénomène de lubrification électroactive à
l'aide d'actionn- eurs piézoélectriques :
application à la réduction des forces de frottement sec dans dans
un moteur à combustion interne», Thèse de
doctorat, Institut National Polytec- hnique de
Toulouse, France, Juin
2006.
[43] Z. Ghalmi,
«Contribution au développement d'un capteur ultrasonique
pour mesurer l'épaisseur de la glace»,
Mémoire de la maîtrise en ingénierie,
Université du Québec,
Chicoutimi, Canada, Mars 2006.
[44] G. Sebald,
«Nouveaux monocristaux à forte conversion
piézoélectrique: croissance,
modélisation et caractérisation »,
Thèse de doctorat, Institut National des Sciences
Appliquées de Lyon, France, Septembre
2004.
[45] N. G.
Ledermann, « Piezoelectric acoustic sensors and
ultrasonic transducers based on textured PZT thin films»,
Doctoral thesis, Ecole Polytechnique Fédérale de
lausa- nne, Lausanne,
Switzerland, 2003.
[46] J. Brünahl, «Physics of
piezoelectric shear mode inkjet actuators», Doctoral
thesis, Royal Institute of Technology,
Stockholm, Sweden, 2003.
[47] C. Viguier, «
Contribution au développement d'actionneurs électroactifs pour
l'assi- stance circulatoire : application à la mise au
point d'une fonction antithrombotique», Thèse de
doctorat, Institut National Polytechnique de
Toulouse, France, Décembre
2005.
[48] M. Kaltenbacher, «Numerical
simulation of mechatronic sensors and actuators»,
Springer-Verlag, Berlin
Heidelberg, Germany,
2007.
[49] A. Benayad, «Matériaux
monocristallins à forte activité
piézoélectrique: élaboration
, caractérisation et
application», Thèse de doctorat,
Institut National des Sciences Appliquées de Lyon,
France, Décembre 2005.
[50] A. M. Abdel
Fattah, M .G. S
.Ali, N. Z.
Elsyed, Gharieb. A.
Ali, «Piezoceramic materials for ultrasonic
probes», J. Solids,
Vol. 28, No.
2, Egypt, 2005.
[51] E. Dieulesaint,
D. Royer, « Ondes élastiques dans
les solides », Masson,
Paris, France, 1974.
[52] G. Asch, « Les
capteurs en instrumentation industrielle »,
Bordas, Paris, France
1987.
[53] T. Omori,
H. Makita, M.
Takamats, K. Hashimoto,
M. Yamaguchi, M.
Sato, « Prep- aration of piezoelectric PZT
micro-discs by sol-gel method», T.IEE
Japan, Vol. 121- E,
No.9,
pp.496-500,
2001.
[54] P. Anbalagan,
«Radiation damage of polymers in ultrasonic
fields», Doctoral thesis, Rheinischen
Friedrich-Wilhelms-Universität
Bonn, Bonn, Germany, April
2008.
[55] C. Dutriez,
«Corrélations entre les propriétés
diélectriques et mécaniques des poly- mères ;
influence de la température»,
Thèse de doctorat, Ecole Centrale de Lyon et Ecole
Doctorale des Matériaux de Lyon,
France, Octobre 2004.
[56] N. Noury, «Du
signal à l'information : le capteur intelligent ;
exemples industriels et en médecine»,
Habilitation à Diriger des Recherches,
Université Joseph Fourier de Grenoble 1,
France, Avril 2002.
[57] W. A. Smith,
«The role of piezocomposites in ultrasonic
transducers», IEEE procee- dings ultrasonics
symposium, pp.
755-766, 1989.
[58] J. M.
Gallière, P.
Papet, L. Latorre,
«A unified electrical SPICE model for pie- zoelectric
transducers», IEEE,
978-1-4244-1567-0/07,
pp. 138-142,
2007.
[59] F. Pigache,
«Modélisation causale en vue de la commande d'un
translateur piézoé- lectrique plan pour une application
haptique», Thèse de doctorat,
Université des Sciences et Technologies de Lille,
France, Mars 2005.
[60] W. Huang, «Design
of a radial mode piezoelectric transformer for a charge pump electronic ballast
with high power factor and zero voltage switching»,
Master of sci- ence thesis, Virginia Polytechnic Institute and
State University, Blacksburg, Virginia
, USA, April 2003.
[61] S. Turri, G.
Poulin, « Dispositifs
électromécaniques permettant l'exploitation de l'énergie
des mouvements humain», Colloque Energie portable
: autonomie et intég- ration dans l'environnement
humain (Journées Electrotechniques du Club
EEA), Ca- chan, France, Mars
2002.
[62] B. Multon,
S. Turri, M.
Ruellan, D. Miller,
H. Ben Ahmed, «Produire de
l'énergie pour les appareilles électroniques portables
grâce aux ressources disponibles dans l'environnement
humain», AS
n°106CNRS-STIC(Conception faible
consommation) , Paris, France,
Mai 2004.
[63] M. C. Belaid,
«Unité d'entré/sortie et
périphériques», Les Pages Bleues Sarl RIMS
Raffor , Bouira, Octobre 2001.
[64] C. C. Domingues,
«Conception de transducteurs acoustiques
micro-usinés», Thèse de doctorat,
Institut National Polytechnique de Grenoble,
France, Avril 2005.
[65] A. Kassem, « Contributions à
la faisabilité d'un système sur puce dédié à
l'imagerie par ultrasons», Thèse de
doctorat, Université de Montréal,
Canada, Décembre 2004.
[66] D. Maillard, « Ondes
élastiques dans les solides », Cours de vibrations
et ondes, Université Paris7-Denis
Diderot, France.
[67] P. B. Nagy,
«Introduction to ultrasonics»,
20-251-728,
2001.
[68] M. Ribault,
«Caractérisation ultrasonore de lésions induites
par ultrasons focalises de haute intensité»,
Thèse de doctorat, Université Claude Bernard
- Lyon 1, France, Janvier
1999.
[69] J. E.
Wilhjelm, O. T.
Andersen, «Medical diagnostic ultrasound»,
Technical Unive- rsity of Denmark, Denmark,
2004.
[70] J. Johansson,
«Microelectronics for the thumb-size ultrasound measurement
system », Luleå University of
Technology, Luleå, Sweden,
2004.
[71] E. Molz,
D. Canny, E.
Evans, «Ultrasonic velocity and attenuation measurements
in high density drilling muds», Baker Hughes INTEQ
, Houston, Texas,
USA.
[72] K. K. Shung,
« Diagnostic ultrasound: imaging and blood flow
measurements », Taylor & Francis
Group. LLC, USA,
2006.
[73] Panametrics,
www.panametrics.com,
« Technical notes », pp.
32-40.
[74] M. Wanin,
«Evaluation non destructive de la qualité des
matériaux», Technique de
l'Ingénieur, Doc. M 4
130, France, Décembre
2001.
[75] M. Al Bahri, «Influence de la
température sur le comportement statique et dynamiq ue des capteurs de
pression capacitifs au silicium», Thèse de
doctorat, Institut Nati- ional des Sciences Appliquées
de Toulouse, France, Mai
2005.
[76] A. Chaehoi, «Conception et
modélisation de MEMS monolithiques CMOS en tech- nologie FSBM:
application aux
accéléromètres», Thèse de
doctorat, Université Mo- ntpellier II,
Sciences et Techniques du Languedoc, France,
Octobre 2005.
[77] J. -B. Bureau,
«Conception, realisation de
micro-capteurs de force à base de jauges
piezoresistives pour la caracterisation mecanique d'assemblages cellulaires en
milieu liquide», Thèse de
doctorat, Universite des Sciences et Technologies de
Lille, France , Decembre 2006.
[78] C. Malhaire,
«Caracterisation et modelisation de microtransducteurs de
pression à hautes performances integres sur
silicium», Thèse de doctorat,
Institut National des Sciences Appliquees de Lyon,
France, Janvier 1998.
[79] Y. B. Gandole,
S. P. Yawale,
S. S. Yawale, «
Simulation of pulser receiver system for ultrasonic
measurments», International Journal of Pure and Applied
Physics,
ISSN 0973-1776,
Vol. 2, No.
2,
pp.167-186,
India, 2006.
[80] O. Guedes, «
Generation et propagation ultrasonore»,
orland.guedes@freeir, septe- mbre
2005.
[81] K . W. Tay,
« The analysis and design of film bulk acoustic-wave
resonators», Doctoral thesis, National
Cheng Kung University Tainan, Taiwan,
China, January 2005.
[82] M. Engholm, «A
narrowband ultrasonic spectroscopy technique for the inspection of layered
structures», Technical Licentiate
thesis, Uppsala University, Uppsala,
Sweden, August 2006.
[83] K. Sadasing, «Transducteur
piezoceramique large bande», Laboratoire d'acoustique
appliquee, Ecole d'ingenieurs-HES,
Genève, Suisse,
2001.
[84] J. David N.
Cheeke, «Fundamentals and applications of ultrasonic
waves», CRC Press LLC,
USA, 2002.
[85] E. Dijkstra,
«Ultrasonic distance detection in spinal cord
stimulation», Doctoral thesis, University of
Twente, Enschede, the
Netherlands, February 2003.
[86] E. Dieulesaint,
D. Royer, «Propagation et generation des
ondes elastiques », Tech- nique de
l'Ingénieur, Doc. E 3
210, France.
[87] S. Sherrit,
S. P. Leary, B.
P. Dolgin, Y.
B-Cohen, «Comparison of the Mason and
KLM equivalent circuits for piezoelectric resonators in the thickness
mode», IEEE Ultrasonics Symposium,
1999.
[88] S. A. Morris,
«Equivalent circuit modeling for thin disk and bar type
piezoelectric transducers», Master of science
thesis, the University of Tulsa, Ok,
1986.
[89] D. J. Powell, J. Mould, G. L. Wojcik,
«Dielectric and mechanical absorption mec- hanisms for time and
frequency domain transducer modeling», A preprint of an
article to appear in the 1998 IEEE Ultrasonic Symposium Proceedings.
[90] T. Ritter,
K. K. Shung, W.
Cao, T. R.
Shrout, «Electromechanical properties of thin strip
piezoelectric vibrators at high frequency», Journal of
Applied Physics,
Vol. 88, No.
1,
pp.394-397,
USA, July 2000.
[91] S. Sherrit, V.
Olazábal, J.
M. Sansiñena,
X. Bao, Z.
Chang, Y. Bar-
Cohen, «
The use of piezoelectric resonators for the characterization
of mechanical properties of polymers», Proceedings of the
SPIE Smart Structures Conference, Vol.
4695, No. 35, San
Diego, CA, March 2002.
[92] Morgan Electro ceramics,
www.morganelectroceramics.com,
«Technical informati- on:
introduction to piezoelectric ceramics»,
USA, May 2001.
[93] D. Benbekrite,
«Caractérisation d'un capteur
piézoélectrique ultrasonore»,
Mémoire de magister, Université des Sciences et
de la Technologie d'Oran-Mohamed Boudiaf ,
Juillet 1999.
[94] W. Szlabowicz,
«Contribution au dimensionnement et à la
réalisation d'actionneur Piézoélectrique à rotation
de mode fort couple pour applications
aéronautiques», thèse de
doctorat, Institut National Polytechnique de Toulouse,
France, Novembre 2006.
[95] W. M. Leach,
«Controlled-Source analogous circuits and SPICE models for piezo-
electric transducers», IEEE transactions on
ultrasonics, ferroelectrics, and frequency
control, Vol. 41,
No. 1, pp. 60-66,
January 1994.
[96] J. V.
Deventer, T. Löfqvist,
J. Delsing, «PSPICE Simulation of
ultrasonic systems Systems», IEEE transactions on
ultrasonics, ferroelectrics, and frequency
control, Vol. 47,
No. 4, pp.
1014-1024, July
2000.
[97] R. S.
Dahiya, M. Valle,
D. Caviglia, G.
Metta, L. Lorenzelli,
«Modeling of lossy piezoelectric polymers in
SPICE», University of Genoa, Italy.
[98] J. V. Deventer,
«Modeling an Ultrasonic Transducer with
SPICE», In First annual conf. on
CSEE», Luleå University of
Technology, Sweden, May
2000.
[99] G. Asch,
«Acquisition de données du capteur à
l'ordinateur», Dunod,
1999.
[100] J. V.
Deventer, «Material investigations and
simulation tools towards a design strategy for an ultrasonic
densitometer», Doctoral thesis,
Luleå University of Tech- nology, Sweden,
2001.
[101] M. Brissaud,
L. Eyraud, H.
Kleimann, «Modélisation analytique
tridimensionnelle des modes de vibrations des éléments
céramiques piézoélectriques utilisés en
image-
rie acoustique»,
Acustica, Vol. 66,
No. 2, pp.
62-72, Juillet
1988.
[102] M. Brissaud,
«Nouvelles procédures tridimensionnelles de
caractérisation des mat- ériaux
piézoélectriques», Colloque de
physique, Colloque ,
supplément au No. 2, Tome 51,
pp. 879-582,
Février 1990.
[103] S. El Nachef, M.
Brissaud, «Modélisation tridimensionnelle
: identification et infl- uence du couplage sur les
paramètres complexes des matériaux
piézoélectriques», Journal de physique
IV, Colloque Cl, supplément au Journal
de physique III, Vol. 2,
pp. 369-372, Avril 1992.
[104] M. Brissaud,
L. Eyraud, H.
Kleimann, «Modélisation analytique
tridimensionnelle du comportement vibratoire d'un élément
piézoélectrique», J.
Acoustique, pp. 437-
448, Décembre 1989.
[105] Dragan Manèiæ, Violeta
Dimiæ, Milan Radmanoviæ,
«Resonance frequencies of PZT piezoceramic disks
: a numerical approach», Facta
Universitatis, Series:
Mechanics, Automatic Control and Robotics,
Vol. 3, No.
12, pp. 431-442,
Yugoslavia, 2002.
[106] L. Peric, «Coupled
tensors of piezoelectric materials state and
applications», MP In- terconsulting:
ultrasonics-sonochemistry-innovation,
Switzerland, 2005.
[107] N. Ratier,
«Physique des micro-capteurs», Ecole
Nationale Supérieure de Mécanique et des Microtechniques de
Besançon, France.
[108] S. Chaussedent, «Cours de physique
ondulatoire pour les sciences de la terre»,
Université d'Angers, France,
Année 2001-2002.
[109] F. Lakestani, «
Etude théorique et expérimentale des transducteurs ultrasonores
piézoélectriques fonctionnant dans le domaine du
mégahertz», Thèse de
doctorat, Institut National des Sciences Appliquées de
Lyon, France, Juin 1984.
[110] S. Kim, « Low power
energy harvesting with piezoelectric generators»,
Doctoral thesis, University of Pittsburgh,
December 2002.
[111] IEEE Standard on Piezoelectricity (IEEE Std
176-1978), Institute of Electrical and
Electronic Engineers, New York,
USA, pp.
10-14.
[112] N. RIZET,
«Contrôle actif de vibrations utilisant des
matériaux piézoélectriques»,
Thèse de doctorat, Institut National des Sciences
Appliquées de Lyon, France, Janvier
1999.
[113] S. Sherrit, B. K. Mukherjee,
«Characterization of piezoelectric materials for
transd- ucers», Jet Propulsion
Laboratory, California Institute of
Technology, Pasadena,
California, USA.
[114] Morgan Electro ceramics,
www.morganelectroceramics.com,
«Piezoelectric cerami- cs»,
USA, November 2007.
[115] L. Khadir, «
Etude du phénomène de résonance des pièces
complexes en aluminium », Mémoire de la
maîtrise en ingénierie, Université du
Québec, Chicoutimi, Canada,
Août 2007.
[116] Morgan Electro ceramics,
www.morganelectroceramics.com,
«Technical-publication TP-226: properties of
piezoelectricity ceramics», USA.
[117] V. Pommier,
M. Budinger, B.
Mouton, S. Leleu,
«Contrôle actif de vibrations»,
CETSIS'2005, Nancy, 25-27 octobre
2005.
[118]
http://www.ndt-ed.org
[119]
http://www.directindustry.fr
[120] F. Bowman,
«Introduction to Bessel functions», Dover
Publications Inc, New York, USA,
1958.
Annexes
Annexe A
Notions fondamentales d'élasticité
Une déformation produite en un point d'un milieu
élastique se transmet de proche en proche dans ce milieu et ce
phénomène de propagation met en jeu les propriétés
élastiques du milieu, propriétés que nous allons
maintenant rappeler.
A.1 Contraintes
Une contrainte est une force par unité de surface qui
agit sur un élément de volume élémentaire, sa
notion permet de décrire la répartition des forces à
l'intérieur d'un solide soumis à une charge [107].
Considérons un parallélépipède
élémentaire. Sur chacune de ces faces s'exerce une contrainte qui
peut se décomposer en trois composantes selon les axes du trièdre
(????1??2??3) (cf. figure A). Ces composantes, notées ?????? ; ??, ?? =
1 a 3), sont les sont les éléments du tenseur des
contraintes« ?? a , l'indice «??» repérant la
direction dans laquelle s'exerce la contrainte et l'indice « ??
a~ se référant à la face sur laquelle elle s'exerce.
Les éléments ?????? sont dites contraintes normales, car elles
agissent perpendiculairement à la face. Les éléments
?????? = ?????? ; ?? ? ??~ sont dites contraintes tangentielles (ou de
cisaillement) puisqu'elles agissent dans le plan de la surface. Le
tenseurI des contraintes est donc symétrique et
s'écrit [108]:
|
|
??11
|
??12
|
??13
|
|
|
??????
|
=
|
??21
|
??22
|
??23
|
(??. 1)
|
|
|
??31
|
??32
|
??33
|
|
??12
??11
??21
??
??31
??22
??32
??13
??23
??33
??3
??2
??1
Fig. A - Notation des contraintes sur un volume
élémentaire
I Le concept du tenseur à été introduit,
à la fin du dix-neuvième siècle, par le physicien W.Voigt
pour définir l'état de tension
mécanique d'un solide (le mot tenseur vient
de tension), sa notation apparaît dis qu'on cherche à
établir des relations linéaires entre effets et causes dans les
milieux anisotropes. Dans un cristal, une cause appliquée suivant une
direction donne en générale naissance à un effet
orienté suivant une autre direction. Le rang d'un tenseur correspond au
nombre d'indices nécessaires pour définir un de ses
éléments : un tenseur de rang « r » est un ensemble de
3r éléments repérées par « r » indices
[51].
A.2 Déformations
Lorsque des forces extérieures sont appliquées
à un solide, celui-ci se déplace et se déforme. Cette
déformation est décrite au moyen du tenseur des
déformations « S » qui lui aussi est symétrique. Les
éléments de ce tenseur peuvent s'écrire [109]:
1 +??????
?????? = 2 ?????? (??. 2) ?????? ??????
Ou (???? ??
?????? ???? ???? ??
??????) sont les gradients des déplacements.
Les éléments Sii représentent l'allongement
dans chacune des directions des axes principaux et les éléments
Sij ; i ? j~ représentent les déformations de cisaillement.
A.3 Relation entre contraintes et déformations
En régime élastique, le milieu satisfait la loi
de Hooke qui exprime la proportionnalité entre contrainte et
déformation (i.e. les composantes du tenseur des contraintes sont une
combinaison linéaire de toutes les composantes du tenseur des
déformations), d'où la formulation [5]:
?????? = ?????????? ?? ???? (??. 3)
Les coefficients « cijkl » sont les constantes
élastiques, ils constituent un tenseur de rang 4 comprenant 81
éléments. En fait par suite de la symétrie du tenseur des
contraintes et du tenseur de déformations il y a seulement 36
éléments indépendants. Néanmoins, le produit
tensoriel reste très à manipuler ; c'est pourquoi nous allons
faire appel à une écriture matricielle (c'est-à-dire un
artifice de calcul qui va permettre de simplifier les choses).À cet
effet, une notation contractée des indices est adoptée
[108,110]:
|
???? ???? ????
|
?? ???? ??
|
|
11
|
1
|
|
22
|
2
|
|
33
|
3
|
|
23 ou 32
|
4
|
|
13 ou 31
|
5
|
|
12 ou 21
|
6
|
Tab. A - Notation matricielle
Les notations tensorielles sont réduites à une
notation matricielle pour cijkl qui devient cpq et
vectorielle pour Tij et Skl qui deviennent Tp
et Sq (Sq = Skl si k = l et Sq =
2Skl si k ? l).
En notation contractée (i.e. produit matriciel), la loi de
Hooke s'exprime alors :
Annexe B
Piezoelectricite et materiaux
piezoelectriques
B.1 Relation entre les differentes constantes dielectriques
mecaniques et piezoelectriques
Les differentes constantes dielectriques, mecaniques et
piezoelectriques sont reliees par les relations suivantes [1111:
· Constantes mecaniques
cEr 47" sE = 8P4
(B.1)
P
CDr 47" SD = 8P4
(B.2)
P
D E
CP4 = CP4 + e kP
hkq (B. 3)
sgi = sPEq -- dkpgkg
(B.4)
· Constantes
diélectriques
AsicEjsic = 8ii (B.5)
gkEjic = 8ii (B. 6)
T S
£L - = E - - + d -14 1 e-4
(B.7)
11 11
1311 = 13 fj g iq hi q (B.8)
· Constantes piazoilectriques
dip = Eric .9kp (B.9)
eiP = digcrip (B.10)
tip = filic dkp (B.11)
hip = gig e (B.12)
ip
avec i,j, k = 1,2,3 : Indices electriques.
p, q, r = 1,2,3,4,5,6 : Indices mecaniques.
Sij : Matrice unite de type (3 x 3).
opq : Matrice unite de type (6 x
6).
B.2 Fabrication des céramiques
piézoélectriques PZT
La figure B.1 illustre le cycle de fabrication des
céramiques piézoélectriques PZT par voie solide.

Fabrication d'une poudre
PZT à partir
d'oxydes
chauffés à 900°C
Obtention d'une céramique crue par
pressage d'un
mélange (poudre
PZT+ liant) dans une matrice
Déliantage à 600°C

Polarisation par application d'un
champ électrique
continu
(plusieurs kV/mm)
|
Dépôt des électrodes
par
sérigraphie
|
Frittage de la céramique crue à
plus de
1200°C
|
|
Fig. B.1 - Cycle de fabrication des céramiques PZT par
voie solide [112]
B.3 Coefficient de couplage électromécanique et
permittivitéen fonction de l'impédance acoustique pour une large
gamme de matériaux piézoélectriques disponibles
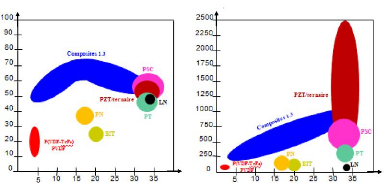
kt(%) å33,r
S
Z(MRa) Z(MRa)
(a) (b)
PZT : Zircono Titanate de Plomb
PVDF : Polymère
P(VDF-TrFe) : Copolymère
Composites 1.3 : Composites PZT et
polymère PSC : Monocristaux à base de Plomb
|
BIT : Titanate de Bismuth LN :
Niobate de Lithium PN : Niobate de Plomb PT :
Titanate de Plomb
|
|
B.4 Echantillons pour la caractérisation des modes de
défor- mation fondamentaux
Forme d'échantillon
|
Mode de deformation
|
Direction polarisation
|
Excitation
|
Direction de vibration
|
Coefficients utiles
|
Frequence de
resonance
|
Coefficient de
couplage
|
a3
|
|
a3
a1
|
|
D
|
|
Barreau
|
|
|
|
??33
??33
??33
??33 ??
|
??3??
=
|
2
??33
2
=
|
|
|
a2 3
a3>5.a1 ; a3>5.a2 a3>5.D
2
1
|
|
|
Transverse (lateral)
|
|
|
|
??31
??31
??31
??33 ??
|
??1
???? =
??2
|
|
|
|
|
a1
|
|
|
|
|
Epaisseur
|
|
|
|
??33
??33
????
?? 33
|
??3??
???? =
??3
|
|
D
|
|
a3 a1
a3
a2
3
a1 et a2>10.a3
1
|
|
|
|
|
|
D
|
Radial (planaire)
|
|
|
??31
|
??31
????
T
å33
|
?? ??
???? =
??
|
2
k 2 =k 2
1 1 -óE
|
|
|
|
|
|
|
D>20.a3
|
|
Cisaillement
|
|
|
|
d15
??15
??15
??11 ??
|
??5
???? =
??3
|
|
a3
|
|
|
|
a2
a1 et a2>10.a3
|
|
|
|
B.5 Caractéristiques des céramiques
piézoélectriques utili- sées
|
Symbole
|
Unité
|
PZT503
(ou
PXE5)
<<Céramique
douce>>
|
PZT802
(ou
PZT8)
<<Céramique
dure>>
|
Caractéristiques électriques à faible
champ
|
Constantes diélectriques relatives (å0 = 8.85 x
10-12F.m -1)
|
T
år11
|
-
|
1800
|
1290
|
|
|
1150
|
|
|
900
|
|
|
600
|
Tangente de l'angle de pertes diélectriques
|
??????????
|
|
0.003
|
Résistivité (à 25 °C)
|
??????
|
-
|
5010
|
1010
|
Caractéristiques
électromécaniques
|
Coefficients de couplage
|
??15
|
-
|
0.66
|
0.55
|
|
|
0.3
|
|
|
0.64
|
|
|
-
|
|
|
0.54
|
Constantes de charge
|
??15
|
10-12??. ??-1
|
515
|
300
|
|
|
-97
|
|
|
250
|
|
|
31
|
Constantes de tension
|
??15
|
10-3??. ??. ??-1
|
33
|
-28.9
|
|
|
-10.9
|
|
|
24.6
|
|
|
3.6
|
Constantes de pression
|
h 15
|
108??. ??-1
|
-
|
12.9
|
|
|
-7.8
|
|
|
26.9
|
Coefficients piézoélectriques
<<eij>>
|
e15
|
??. ??-2
|
-
|
10.3
|
|
|
-4
|
|
|
13.8
|
Constantes de fréquence
|
??1
|
????. ??
|
1450
|
1700
|
|
|
-
|
|
|
-
|
|
|
2070
|
|
|
2000
|
|
|
-
|
|
|
2285
|
|
Facteur de qualité
|
Qm
|
-
|
75
|
1000
|
Caractéristiques mécaniques
|
Compliances à champ constant
|
??
??11
|
10-12??2.??-1
|
15
|
11.5
|
|
|
-3.7
|
|
|
-4.8
|
|
|
13.5
|
|
|
31.9
|
|
|
30.4
|
Compliances à induction constante
|
??
??11
|
|
10.1
|
|
|
-4.5
|
|
|
-2.5
|
|
|
8.5
|
|
|
22.6
|
|
|
30.4
|
Constantes élastiques à champ constant
|
??
??11
|
1010??. ??-2
|
-
|
13.7
|
|
|
6.97
|
|
|
7.16
|
|
|
12.4
|
|
|
3.13
|
|
|
3.40
|
Constantes élastiques à induction constante
|
??
??11
|
|
14
|
|
|
7.28
|
|
|
6.08
|
|
|
16.1
|
|
|
4.46
|
|
|
3.40
|
Coefficient de Poisson
|
???? = -??12??/??11??
|
-
|
0.3
|
0.32
|
Masse volumique
|
??
|
103????.??-3
|
7.8
|
7.6
|
Caractéristiques thermiques
|
Température de Curie
|
????
|
°??
|
285
|
300
|
Conductivité thermique
|
-
|
??. ??-1. ??-1
|
1.2
|
-
|
|
Tab. B.2 - Caractéristiques des céramiques
piézoélectriques utilisées [106,114,116]
Annexe C
Analogie électro-acoustique
Par une analogie électro-acoustique (cf. tableau C), les
expressions des grandeurs acoustiques sont identifiées à des
variables électriques.
Domaine électrique
|
Unité
|
Domaine mécanique
|
Unité
|
Courant << I >>
|
A
|
Vitesse << Va >>
|
m.s-1
|
Tension << v >>
|
V
|
Force << F >>
|
N
|
Impédance électrique <<
Ze>>
|
Ù
|
Impédance acoustique << Za>>
|
Rayl
|
Puissance électrique << Ps >>
|
W
|
Intensité acoustique << Ia >>
|
kg.m-1.s-2
|
|
Tab. C - Analogie entre les grandeurs électriques et
acoustiques [5]
Annexe D
Modèles unidimensionnels et
hypothèses[104]
Les expressions unidimensionnelles des impédances
électriques des céramiques piézoélectriques en
forme de disque (mode radiale) et de barreau (mode barreau) sont respectivement
données par les relations :
?? = ????0 '
|
?? 1 +
|
????2
1 - ????2
|
1 + ????)??1(??????)
???? ????0 ???? ??) - (1 -
????)??1(???? ??) 1
|
-1
|
(??.1)
|
|
1 2
?? = ????0 "?? 1 - ??33
'
tan ??3 ??3
2
'
??3 ??3
2
avec
??0 '
??0 "
??1
|
?? = ??33 ?? (???? ??)
|
= ??33
1
1
=
|
|
????2
|
??1
|
(???? ??)
|
|
??3
??1??2
|
|
|
- ????
|
|
(??. 3)
(??. 4)
(??. 5)
??
???? = (??. 6)
??????
'
??3
??
= ' (??.7)
????3
·
oil
???? est le nombrl R3'Rna dans la céramique selon le rayon
« a ».
· ??3 ' UND KRP HI R'RnIe dans la céramique selon
l'axe de polarisation «x3».
· Capacité du disque en mode radiale.
· Capacité du barreau.
Les hypothèses et résultats concernant les
différentes géométries des céramiques
piézoélectriques sont récapitulés dans le tableau D
:
|
Geometrie
|
|
|
|
|
Hypothèses
|
|
|
|
Résultats
|
|
|
Mécaniques
|
|
Électriques
|
|
Vitesse
|
|
Permiftivite
|
|
Coefficient
de couplage
|
|
Plaque mince
a3 a2
|
??1 =
??5 =
??4 =
? ??1,
??3 ?
|
??2
??6
??5
??2
0,
|
=
=
=
??3
|
??4
0
??6
?
|
= = 0
|
0
0
|
??1 = ??2 = 0
??1 = ??2 =0
? ??1, ??2
??3 ? 0, ??3 =
|
??????
|
|
??
??33
2
|
|
??
??33
|
????2
|
2 ??33 ??
??33
=
|
|
=
????3
??
|
??
??33
|
|
Barreau long
a3 >> a1, a2
|
??1 =
??5 =
??4 =
? ??1,
??3 ?
|
??2
??6
??5
??2
0,
|
=
=
=
??3
|
??4
0
??6
?
|
= = 0
|
0
0
|
??1 = ??2 = 0
??1 = ??2 =0
? ??1, ??2
??3 ? 0, ??3 =
|
??????
|
|
'2 = 1
|
|
EL (1. - kh)
|
2
??33
|
2
??33
=
|
|
?? ?? ??33 ??33
|
|
????3 ??
????33
|
|
Disque mince
a3 << a
|
??3 =
???? =
???? =
??3 =
??6 =
|
0
????
????
??4
0
|
?
?
=
|
0
0
??5
|
=
|
0
|
???? = ???? = 0
???? = ???? =0
? ??, ??
??3 = ??????, ??3
|
? 0
|
2
??????
|
1
|
|
ET (1 k) -33 - P
|
2
??31
???? 2 =
|
2
??31
=
|
|
=
????11 ?? 1 -
??12 ??
???? = -
|
????~
|
?? ??33 ??
??11
2 2
|
|
??31
1 - ????
|
|
??
??11
|
Tab. D - Caractérisation unidimensionnelle :
hypothèses et principaux résultats
Annexe E
Photographies
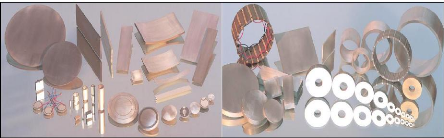
Fig. E.1 - Céramiques piézoélectriques PZT
: plaques, disques émaillés, anneaux, tubes,
rondelle,
portions de sphères [39]
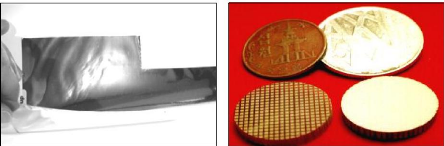
Fig. E.2 - Film PVDF [117] Fig. E.3 - Composites 1.3
fabriqués
(sans métallisation à gauche) [2]
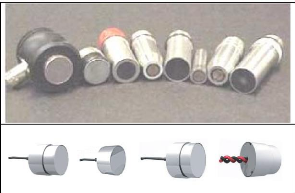
Fig. E.4 - Transducteurs ultrasonores
piézoélectriques [118,119]
Annexe F
Fonctions de Bessel de première espèce
Les fonctions de Bessel de premi~re esp~ce d'ordre « n
» de la variable « x » sont calculées à
partir de la suite suivante [120]:
Co
)
(2). an, x, (x\n (-1)p . x
2p
LA 22p. p! (n + p)! (F)
p =0
Les tracés des fonctions de Bessel de premiqre espqce
d'ordres 0 à 8 sont montrés sur la figure F :
Fig. F - Fonctions de Bessel de première
espèce
| 

